ROS和OpenCV的对接cv_bridge
做一个诚实的ROS教程搬运工.............................
官网链接:http://wiki.ros.org/cv_bridge
一、Package Summary
Released Continuous
integration Documented
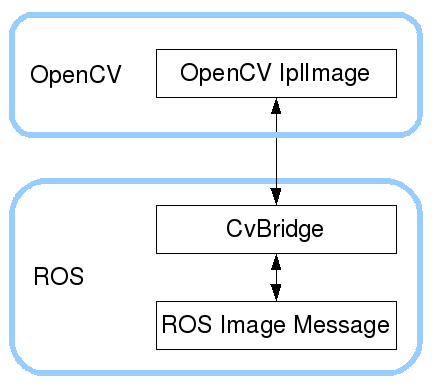
This contains CvBridge, which converts between ROS Image messages and OpenCV images.
- Maintainer status: maintained
- Maintainer: Vincent Rabaud <vincent.rabaud AT gmail DOT com>
- Author: Patrick Mihelich, James Bowman
- License: BSD
- Bug / feature tracker: https://github.com/ros-perception/vision_opencv/issues
- Source: git https://github.com/ros-perception/vision_opencv.git (branch: indigo)
To learn how to interface OpenCV with ROS using CvBridge, please see thetutorials page.
ROS和OpenCV的对接cv_bridge的更多相关文章
- Ros Kinetic 配置 OpenCV2和CV_bridge (Python, C++)
本篇介绍如何在Ros-kinetic环境下运用opencv2进行开发的配置,系统平台为64位Ubuntu16.04. 需要系统环境: 1.Ros kinetic版本,一般自带cv_bridge, 若没 ...
- 关于ros将opencv版本固定“写死”的一些想法
今天主要工作是将ros和zed结合起来,但是发现自己安装了opencv3.1,ros indigo安装的是opencv2.4.8,这就麻烦了,zed支持的是opencv3.1.一开始使用slam2时, ...
- [实例]ROS使用OpenCV读取图像并发布图像消息在rviz中显示
思路: (1)使用opencv读取本地图像 (2)调用cv_bridge::CvImage().toImageMsg()将本地图像发送给rviz显示 一.使用opencv读取本地图像并发布图像消息 ( ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- 在ROS中使用OpenCV
1.在工作空间下创建程序包 $ cd ~/catkin_ws/src$ catkin_create_pkg robot_vision roscpp std_msgs cv_bridge image_t ...
- ROS关于cv_brige的使用
最近想使用OpenCV 和ROS实现点云的拼接,实现三维重建,那么在学习了kinect的基本的使用方法以后我们知道,直接使用ROS 的包即可得到点云,深度图,rgb图等信息, roslaunch op ...
- ROS学习笔记(三)
机器人建模与仿真URDF(Unified Robot Descrption Format,统一机器人描述格式),ROS提供了URDF的c++解析器.安装语法检查工具sudo apt-get insta ...
- [ROS] Studying Guidance
Reference: https://www.zhihu.com/question/35788789 安装指南:http://wiki.ros.org/indigo/Installation/Ubun ...
- 运行ORB-SLAM笔记_使用篇(二)
1. 编译完成之后就可以使用了,按照说明我们可以知道,首先开启roscore
随机推荐
- nlogn求LIS(树状数组)
之前一直是用二分 但是因为比较难理解,写的时候也容易忘记怎么写. 今天比赛讲评的时候讲了一种用树状数组求LIS的方法 (1)好理解,自然也好写(但代码量比二分的大) (2)扩展性强.这个解法顺带求出以 ...
- 121. Best Time to Buy and Sell Stock(动态规划)
Say you have an array for which the ith element is the price of a given stock on day i. If you were ...
- 【codeforces 768E】Game of Stones
[题目链接]:http://codeforces.com/contest/768/problem/E [题意] NIM游戏的变种; 要求每一堆石头一次拿了x个之后,下一次就不能一次拿x个了; 问你结果 ...
- hdu 1532&&poj1273 基础最大流
#include<stdio.h> #include<string.h> #include<queue> #include<iostream> usin ...
- 各个领域常见的一些bug汇总
一 Android系统功能测试设计的测试用例 a.对所测APP划分模块 b.详细列出每个模块的功能点(使用Xmind绘制功能图) c.使用等价类划分.边界值.场景发等对各功能点编写测试用例(考虑中断功 ...
- LINQ体验(2)——C# 3.0新语言特性和改进(上篇)
整体来说.Visual Studio 2008和.NET 3.5是建立在.NET2.0核心的基础之上,.NET2.0核心本身将不再变化(假设不了解.NET2.0的朋友,请參看MSDN或者一些经典的书籍 ...
- selenium清空默认文字
默认输入框 鼠标点击上去还有文案 直接用 clear不可以
- EarthWarrior3D游戏ios源代码
这是一款不错的ios源代码源代码,EarthWarrior3D游戏源代码. 而且游戏源码支持多平台. 适用于cocos v2.1.0.0版本号 源代码下载: http://code.662p.com/ ...
- C# 数据库备份与还原 小妹做了一个winform系统,需要对sql2000数据库备份和还原(小妹妹你太狠了)
成功了,把代码帖出来给大家看看,跟我刚开始帖出来的差不多,是需要杀掉进程的,我之前调用的存储过程,可能有点问题,现在改成sql了/// <summary> /// 数据库 ...
- bzoj 2252 [ 2010 Beijing wc ] 矩阵距离 —— 多源bfs
题目:https://www.lydsy.com/JudgeOnline/problem.php?id=2252 又没能自己想出来... 一直在想如何从每个1开始广搜更新答案,再剪剪枝,什么遇到1就不 ...