Skimap_ros 利用RGBD创建Octomap(一)
1. 奥比中光astra RGBD相机安装
1.1 安装依赖
$ sudo apt-get install build-essential freeglut3 freeglut3-dev
1.2 检查udev版本,需要libudev.so.1,如果没有则添加
#check udev version, Orbbec Driver need libudev.so.1, if can't find it, can make symbolic link from libudev.so.x.x,
#which usually locate in /lib/x86_64-linux-gnu or /lib/i386-linux-gnu
$ ldconfig -p | grep libudev.so.1
$ cd /lib/x86_64-linux-gnu
$ sudo ln -s libudev.so.x.x.x libudev.so.1
1.3 下载 OpenNI
$ wget http://www.orbbec3d.net/Tools_SDK_OpenNI/2-Linux.zip
1.4 选择解压 OpenNI-Linux-x64-2.3
$ unzip OpenNI-Linux-x64-2.3.zip
$ cd OpenNI-Linux-x64-2.2
1.5 安装
$ sudo chmod a+x install.sh
$ sudo ./install.sh
1.6 重插设备
1.7 加入环境
$ source OpenNIDevEnvironment
1.8 编译例子
$ cd Samples/SimpleViewer
$ make
1.9 连接设备,执行例子
$ cd Bin/x64-Release
$ ./SimpleViewer
$ cd Bin/x64-Release
$ ./SimpleViewer
无没有问题,则显示正常视图
1.10 安装ROS包
安装astra_camera和astra_launch(indigo 可以根据系统不同替换成kinetic等)
$ sudo apt-get install ros-indigo-astra-camera ros-indigo-astra-launch
测试
1.11 新终端,执行astra_launch
$ roslaunch astra_launch astra.launch
使用rqt_image_view, 选择对应话题显示图像
1.12 发现rgb并没有正确显示? 需要UVC支持,安装libuvc和libuvc_ros
libuvc和libuvc_ros安装
安装libuvc支持
$ cd ~
$ git clone https://github.com/ktossell/libuvc
$ cd libuvc
$ mkdir build
$ cd build
$ cmake ..
$ make && sudo make install
安装libuvc_ros
$ cd ~/catkin_ws/src
$ git clone https://github.com/ktossell/libuvc_ros
$ cd ..
$ catkin_make
注意:使用catkin_make,如果报错,注意libusb.h的位置。
使用locate libusb.h,并将其放到合适位置:
$ sudo cp /usr/include/libusb-1.0/libusb.h /usr/local/include/libuvc/
修改下libuvc.h中include中的路径。
测试
在启动roscore后,使用:
$ rosrun libuvc_camera camera_node
rqt_image_view ,查看rgb
2. skipmap 安装测试
2.1 创建workspace
找到某个目录下,我这里选择Documents
$ mkdir skimap_ws/src
$ cd skimap_ws/src
2.2 下载
$ git clone https://github.com/m4nh/skimap_ros.git
安装依赖项,opencv,eigen,boost都是比较常见的,OpenMP 大家安装不熟悉
$ sudo apt-get install build-essential
$ sudo apt-get install gfortran
$ cd /tmp
$ wget http://www.mpich.org/static/downloads/1.4.1/mpich2-1.4.1.tar.gz
$ tar xzvf mpich2-1.4.1.tar.gz
$ cd mpich2-1.4.1/
$ ./configure
$ make
$ sudo make install
查看版本:
$ mpich2version
2.3 编译
$ cd ..
$ catkin_make
2.4 下载[tiago_lar.bag](https://drive.google.com/file/d/0B02158j5inr3Tm9nQjhIQ3Fua3c/view?usp=drive_web) demo数据
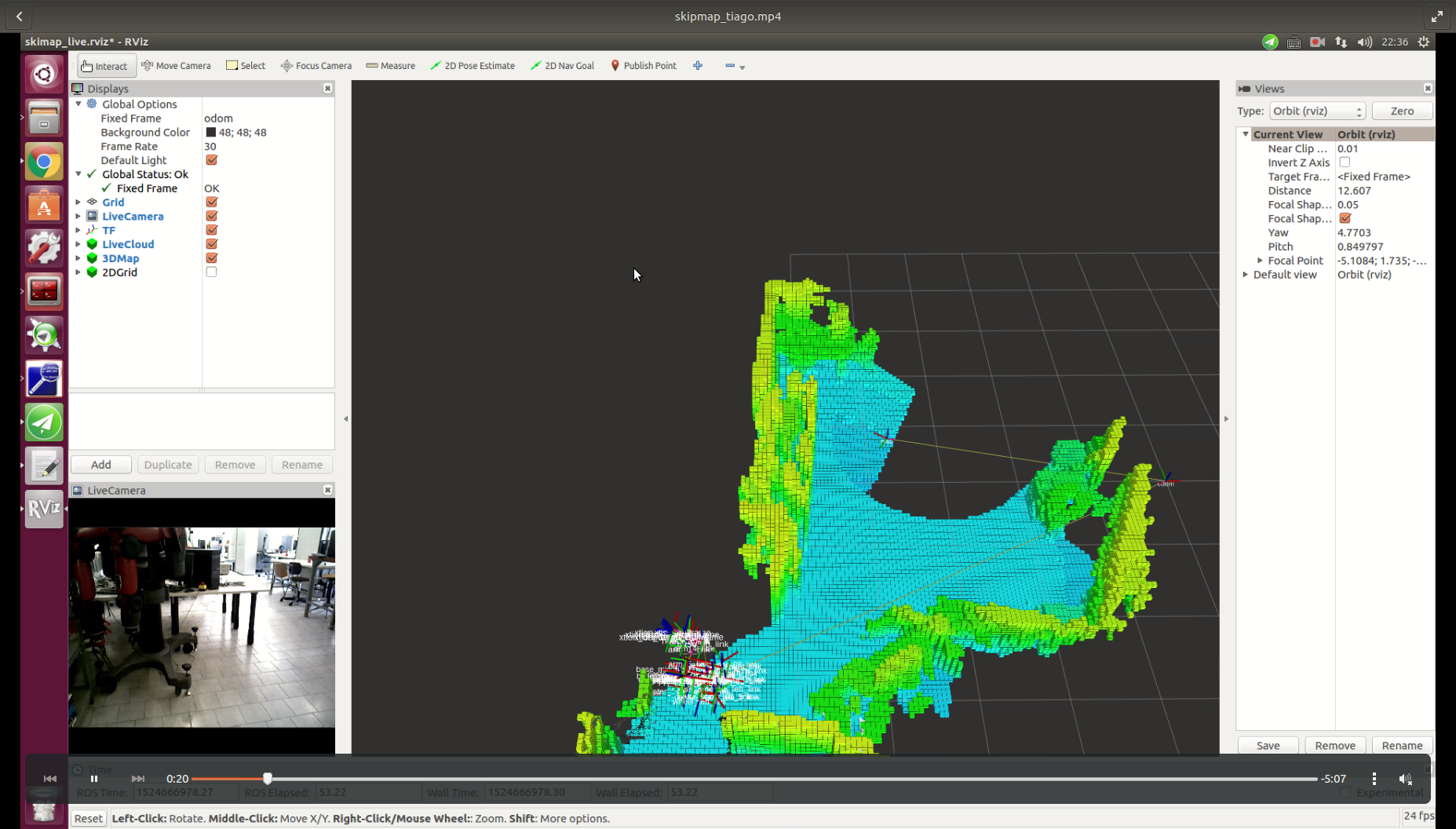
2.5 运行
$ source ./devel/setup.bash
$ roslaunch skimap_ros skimap_live.launch
$ rosbag play 你下载的tiago_bar.bag路径
按照作者给的步骤,运行slamdunk_tracker.launch 总是出错,
ERROR: cannot launch node of type [skimap_ros/slamdunk_tracker]: can't locate node [slamdunk_tracker] in package [skimap_ros]
感觉是Cmakelist出了问题,发现作者只写了:
add_executable(skimap_live src/nodes/skimap_live.cpp)
target_link_libraries(skimap_live ${OpenCV_LIBRARIES} ${catkin_LIBRARIES})
add_executable(slamdunk_tracker src/nodes/slamdunk_tracker.cpp)
target_link_libraries(slamdunk_tracker ${OpenCV_LIBRARIES} ${catkin_LIBRARIES})
没有把slamdunk_tracker.cpp加进去,所以我追加了
add_executable(skimap_map_service src/nodes/skimap_map_service.cpp)
target_link_libraries(skimap_map_service ${OpenCV_LIBRARIES} ${catkin_LIBRARIES})
add_dependencies(skimap_map_service skimap_ros_generate_messages_cpp)
但是在catkin_make时,总是出现feature2d方面的错误,因为作者用了sift,所以opencv要装opencv_contrib模块。opencv 和contrib我都安装了3.4.1版本,但是还是出现错误。我以后还会继续解决这个问题。但是这个不影响建图,真正的建图是在skimap_live.cpp里。
3 与ORB_SLAM2 结合
skimap可以只需要位姿数据,以及RGB和深度图就能重建出来八叉树地图。所以可以把ORB_SLAM 里面的pose取出来,转换成tf发布出来,给skimap就可以。
3.1 发布tf
在ORB_SLAM2 的 ros_rgbd.cc 作如下修改
cv::Mat camera_pose;
camera_pose= mpSLAM->TrackRGBD(cv_ptrRGB->image,cv_ptrD->image,cv_ptrRGB->header.stamp.toSec());
cv::Mat TWC = camera_pose.inv();
cv::Mat RWC= TWC.rowRange(0,3).colRange(0,3);
cv::Mat tWC= TWC.rowRange(0,3).col(3);
tf::Matrix3x3 M(RWC.at<float>(0,0),RWC.at<float>(0,1),RWC.at<float>(0,2),
RWC.at<float>(1,0),RWC.at<float>(1,1),RWC.at<float>(1,2),
RWC.at<float>(2,0),RWC.at<float>(2,1),RWC.at<float>(2,2));
tf::Vector3 V(tWC.at<float>(0), tWC.at<float>(1), tWC.at<float>(2));
tf::Quaternion q;
M.getRotation(q);
q.normalize();
tf::Transform transform = tf::Transform(M, V);
//关于应该发布何时的ros::Time,还需要再确认
broadcaster->sendTransform(tf::StampedTransform(transform,ros::Time::now(),"world","camera"));
不要忘记,增加
#include <tf/transform_broadcaster.h> 以及在CMakeList.txt中增加 find_package(tf)
3.2 运行astra 以及skimap_live
$ roslaunch astra_launch astra.launch
$ roslaunch skimap_ros skimap_live.launch
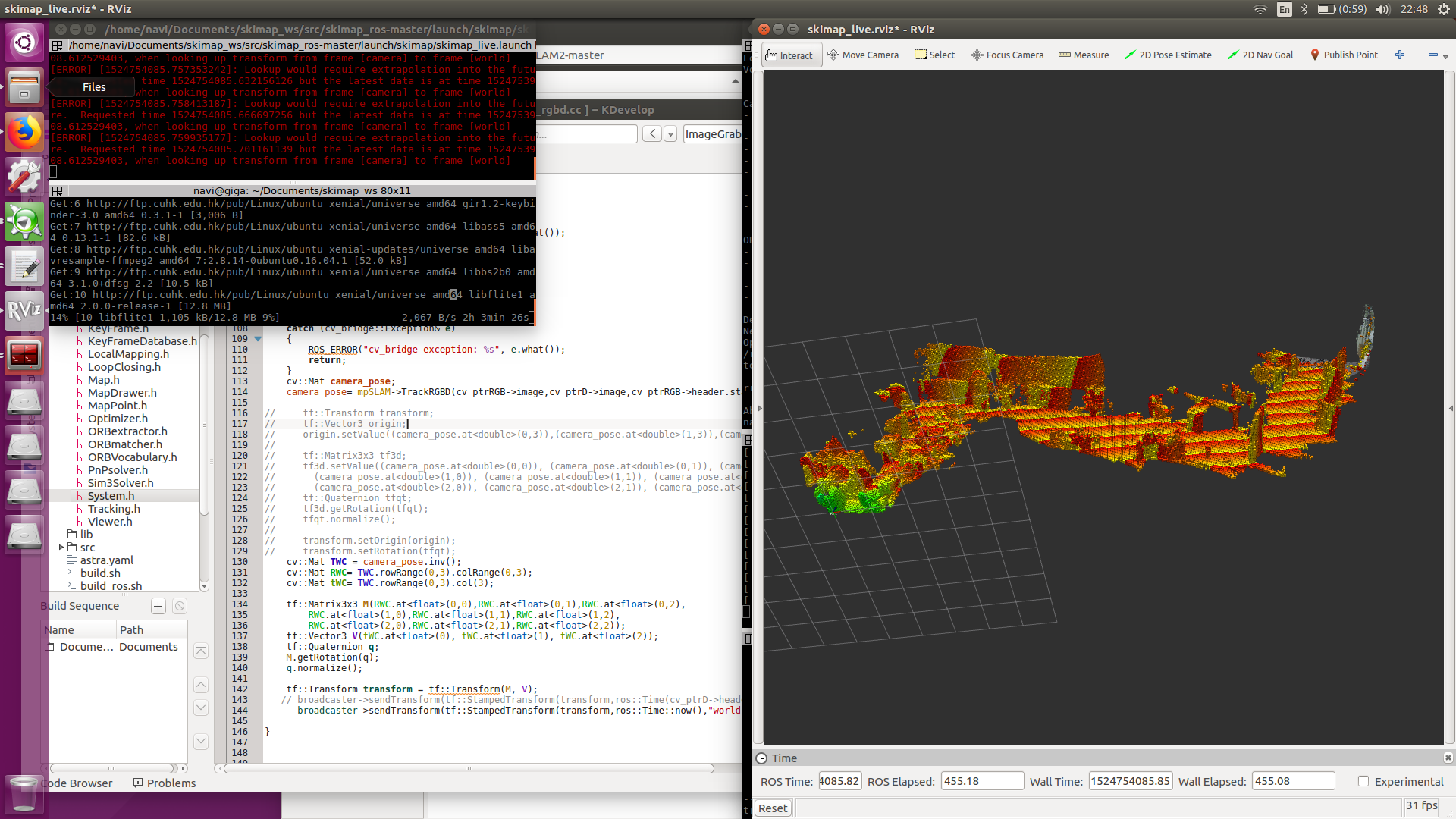
3.3 运行结果
可能是电脑问题,运行速度比较卡,而且只要跟丢,ORB就挂掉,导致地图也停止创建。里面可能有一些小问题需要解决。可以看到,路面创建的还是比较平坦的,墙面以及障碍物位置都还不错。
Skimap_ros 利用RGBD创建Octomap(一)的更多相关文章
- Oracle Sales Cloud:管理沙盒(定制化)小细节1——利用公式创建字段并显示在前端页面
Oracle Sales Cloud(Oracle 销售云)是一套基于Oracle云端的CRM管理系统.由于 Oracle 销售云是基于 Oracle 云环境的,它与传统的管理系统相比,显著特点之一便 ...
- 利用Oracle创建表空间和用户
本文仅用于学习交流,商业用途请支持正版!转载请注明:http://www.cnblogs.com/mxbs/p/6217152.html 第一步,创建表空间 以SYS/sys账户和SYSDBA身份登录 ...
- 利用Oracle创建数据库
本文仅用于学习交流,商业用途请支持正版!转载请注明:http://www.cnblogs.com/mxbs/p/6217151.html 数据库的创建 打开"所有程序"-" ...
- 利用navicat创建存储过程、触发器和使用游标的简单实例
利用navicat创建存储过程.触发器和使用游标的简单实例 标签: navicat存储过程触发器mysql游标 2013-08-03 21:34 15516人阅读 评论(1) 收藏 举报 分类: 数 ...
- java中利用JFrame创建窗体 【转】
1. 一个简单的swing public class Test(){ public static void main(String[] args){ JFrame frame = new JFrame ...
- IOS:利用dispatch_once创建单例
在之前有一篇学习笔记中,记载了一篇如何在OC中实现单例的文章:<IOS学习笔记4—Objective C—创建单例>自苹果引入了Grand Central Dispatch (GCD)(M ...
- 利用WPF创建含多种交互特性的无边框窗体
咳咳,标题一口气读下来确实有点累,让我先解释一下.另外文章底部有演示程序的下载. 本文介绍利用WPF创建一个含有以下特性的窗口: 有窗口阴影,比如QQ窗口外围只有几像素的阴影: 支持透明且无边框,为了 ...
- 编写利用Fragment创建新闻列表
编写利用Fragment创建新闻列表 1.创建新闻实体类News,代码如下: public class News { private String title; private String co ...
- 利用cocoapods创建基于git的私有库
上一篇文章记录了我利用cocoapods创建基于SVN的私有库的全部过程,今天我再记录一下基于git创建的过程. 整体先说明一下创建一个私有的podspec包括如下那么几个步骤: 创建并设置一个私有的 ...
随机推荐
- RabbitMQ ——四种ExChange及完整示例
RabbitMQ常用的Exchange Type有fanout.direct.topic.headers这四种,下面分别进行介绍. 这四种类的exchange分别有以下一些属性,分别是: name:名 ...
- idea模块搭建新手党常见错误
一.搭建java和web模块会出现的错误(此篇以分布式模块为例) 1.创建空工程 1.点击file ,在弹出的窗口左侧选项中在最后有一个Empty Project选项.此处就是创建空工程. 2.在此空 ...
- 微信小程序(14)--上传图片公用组件(父子传参)
这周整理了一下做微信小程序页面时遇到的一些问题,先说说常见的上传图片吧. 上传图片公用组件 首先要了解的是父子传参. 1.A组件为父组件,B组件为子组件,以下是A组件向B组件传参: 在A组件的json ...
- weblogic下载
1.网址 https://edelivery.oracle.com/osdc/faces/SoftwareDelivery 2.信息
- python爬虫:抓取下载视频文件,合并ts文件为完整视频
1.获取m3u8文件 2.代码 """@author :Eric-chen@contact :sygcrjgx@163.com@time :2019/6/16 15:32 ...
- spring整合Quartz2持久化任务调度
转摘 https://blog.csdn.net/qwe6112071/article/details/50999386 因为通过Bean配置生成的JobDetail和CronTrigger或Simp ...
- element-ui中使用el-radio单选切换表格
应用场景:点击单选,切换表格数据 代码: data里的数据:(这里的值是默认选中的 和label值是对应的) change事件操作切换,这里面添加@click事件是不生效的,注意...
- js-ifelse-奇技淫巧
我们有A,B,C,D四个不同的类别,在最开始的时候只有三个类别,并且两个类别是做同样的事: function categoryHandle(category) { if(category !== 'A ...
- linux查找一个文件的路径
- shell脚本学习(3)sed替换
1 sed 替换 1格式: 's/原字符串/新字符串/' 输入源 2正确参考: sed ’s/as/AS/' do.txt 改变字符串as为AS,不会改输入源的文件. 匹配每行第一次匹配的 ...