[PCL]1 PCL点云库安装
1.安装文件下载:官网,我还是比较喜欢别人编译好的安装包啊,哈哈。
http://www.pointclouds.org/downloads/windows.html
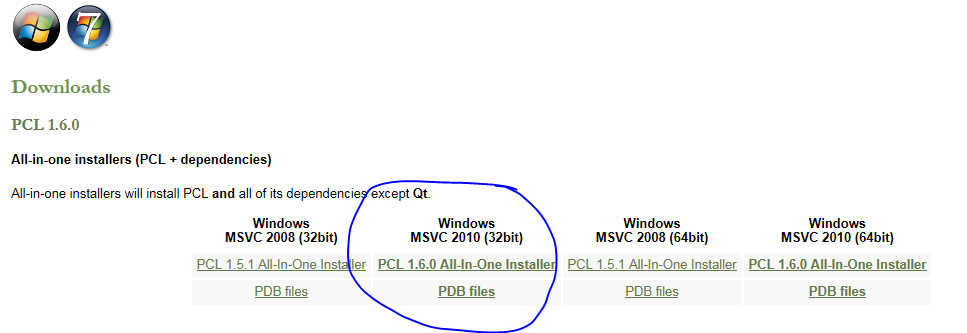
2.傻瓜式安装(下面的依赖项都集成进来了)
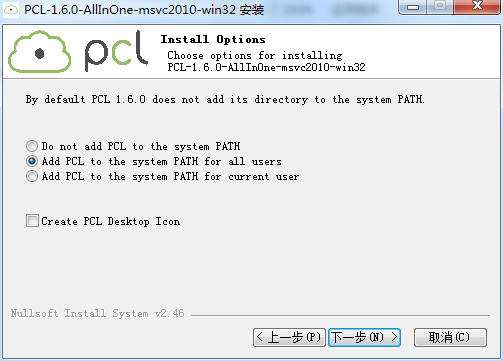 写入环境变量,这个很不错,可选。
写入环境变量,这个很不错,可选。
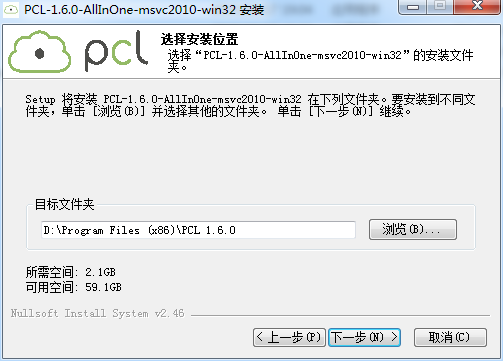
中间安装了Boost、VTK、Kinect驱动什么的。反正是一路下一步,当然我的机器是Win7系统,之前没有安装过PCL,比较纯净。
之后又单独安装了QT4.8.2的sdk。
3.测试
在安装目录下有share/doc/pcl-1.6/tutorials/sources/pcd_write事例程序,用CMake3.3.2生成VS2010项目文件。
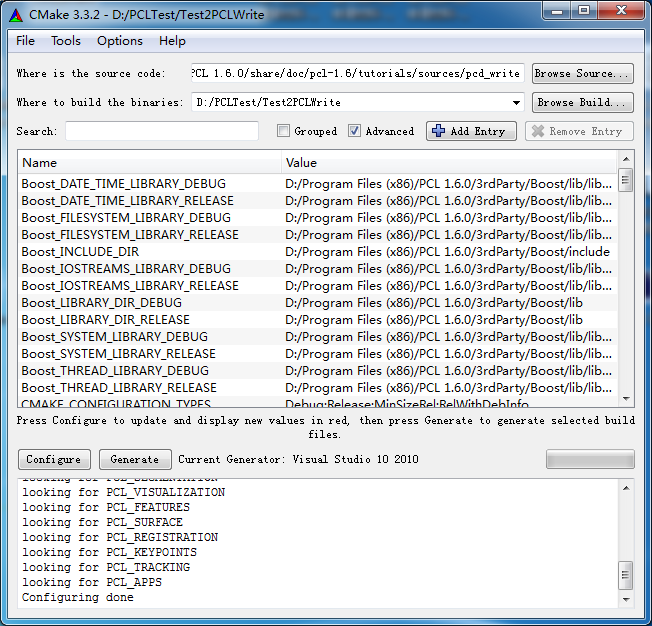
编译运行生成了一个.pcd格式文件。
同样编译下面的程序:D:\Program Files (x86)\PCL 1.6.0\share\doc\pcl-1.6\tutorials\sources\cloud_viewer
这个项目引用了QT4.8.2的sdk的类库。查看刚才生成的.pcd文件,结果如图,大概有几个小点点:
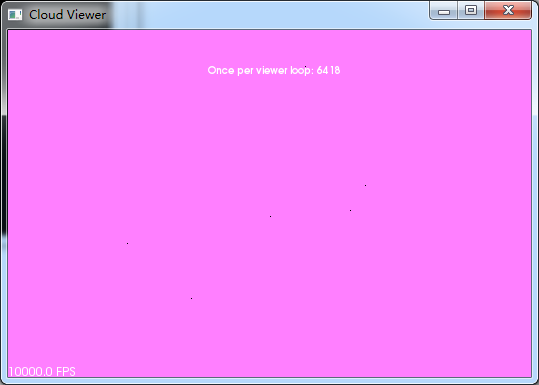
pcd格式文件的基本内容如下:
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 5
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 5
DATA ascii
1.28125 577.09375 197.9375
828.125 599.03125 491.375
358.6875 917.4375 842.5625
764.5 178.28125 879.53125
727.53125 525.84375 311.28125
附加依赖项:debug
D:\Program Files\PCL\lib\pcl_segmentation_debug.lib
D:\Program Files\PCL\lib\pcl_visualization_debug.lib
D:\Program Files\PCL\lib\pcl_features_debug.lib
D:\Program Files\PCL\lib\pcl_filters_debug.lib
D:\Program Files\PCL\lib\pcl_search_debug.lib
D:\Program Files\PCL\lib\pcl_octree_debug.lib
D:\Program Files\PCL\lib\pcl_sample_consensus_debug.lib
D:\Program Files\PCL\lib\pcl_ml_debug.lib
D:\Program Files\PCL\lib\pcl_kdtree_debug.lib
D:\Program Files\PCL\lib\pcl_io_debug.lib
D:\Program Files\PCL\lib\pcl_common_debug.lib
D:\Program Files\PCL\lib\pcl_io_ply_debug.lib
D:\Program Files\PCL\lib\pcl_surface_debug.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_system-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_filesystem-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_thread-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_date_time-vc100-mt-gd-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_iostreams-vc100-mt-gd-1_49.lib
release
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_system-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_filesystem-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_thread-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_date_time-vc100-mt-1_49.lib
D:\Program Files\PCL 1.6.\3rdParty\Boost\lib\libboost_iostreams-vc100-mt-1_49.lib
D:\Program Files\PCL\lib\pcl_io_release.lib
D:\Program Files\PCL\lib\pcl_segmentation_release.lib
D:\Program Files\PCL\lib\pcl_io_ply_release.lib
D:\Program Files\PCL\lib\pcl_ml_release.lib
D:\Program Files\PCL\lib\pcl_features_release.lib
D:\Program Files\PCL\lib\pcl_filters_release.lib
D:\Program Files\PCL\lib\pcl_search_release.lib
D:\Program Files\PCL\lib\pcl_sample_consensus_release.lib
D:\Program Files\PCL\lib\pcl_octree_release.lib
D:\Program Files\PCL\lib\pcl_kdtree_release.lib
D:\Program Files\PCL\lib\pcl_common_release.lib
D:\Program Files\PCL\lib\pcl_surface_release.lib
学习目标:点云的匹配。
[PCL]1 PCL点云库安装的更多相关文章
- Windows下安装PCL点云库
原文链接:http://blog.csdn.net/u012337034/article/details/38270109 简介: 在Windows下安装PCL点云库的方法大概有两种: ...
- PCL 库安装
参考资料: http://www.cnblogs.com/newpanderking/articles/4022322.html VS2010+PCL配置 PCL共有两种安装方式 安全安装版,个人配置 ...
- PCL点云库:对点云进行变换(Using a matrix to transform a point cloud)
点云数据可以用ASCII码的形式存储在PCD文件中(关于该格式的描述可以参考链接:The PCD (Point Cloud Data) file format).为了生成三维点云数据,在excel中用 ...
- 点云库PCL学习
1. 点云的提取 点云的获取:RGBD获取 点云的获取:图像匹配获取(通过摄影测量提取点云数据) 点云的获取:三维激光扫描仪 2. PCL简介 PCL是Point Cloud Library的简称,是 ...
- Windows 8 64位系统 在VS2010 32位软件上 搭建 PCL点云库 开发环境
Windows 8 64位系统 在VS2010 32位软件上 搭建 PCL点云库 开发环境 下载PCL For windows 软件包 到这个网站下载PCL-All-In-One Installer: ...
- 配置点云库PCL时遇到的问题
配置PCL基本参照PCL中国官网教程 http://www.pclcn.org/study/shownews.php?lang=cn&id=34 配置点云库时遇到的问题(基于win8 64位, ...
- PCL点云库:ICP算法
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法.在VTK.PCL.MRPT.MeshLab等C++库或软件中都有实现,可以参见维基百科中的ICP Alg ...
- PCL点云库中的坐标系(CoordinateSystem)
博客转载自:https://blog.csdn.net/qq_33624918/article/details/80488590 引言 世上本没有坐标系,用的人多了,便定义了坐标系统用来定位.地理坐标 ...
- ViCANdo新版本发布(PART1) | 点云库(PCL)集成
激光雷达 随着智能驾驶技术的发展,激光雷达迅速的进入工程师的视野,不管是机械式.MEMS还是纯固态激光雷达,本质上都是以一定的速度扫描照射区域,在此过程中激光雷达不断的发出激光并接收反 ...
随机推荐
- 修改CSV中的某些值 -- 1
修改前: col1,col2,col3,col4 text1,text2,text3,text4 text5,text6,text7,text8 text9,text10,text11,text12 ...
- STATIC::含义
Static 关键字,是作为作用域引用,类似Parent和self 关键字,和Parent和 Self不同 Parent引用父类作用域 Self 引用当前类作用域 Static 引用全部静态作用于,子 ...
- javascript双击事件取消默认的两次单击事件
当一个元素同时具有单击和双击事件时,双击时会触发2次单击和1此双击事件. 双击会:先第1次单击 ,同时触发第2次和双击事件. 造成的不好影响:每次单击事件会延迟执行. <!DOCTYPE htm ...
- JAVA图片相关
有些图片后缀为jpg,但是实际格式却不是jpg,通过url下载图片字节.然后用ImageIO读取时,出现返回null的情况.出现这种情况,就需要使用webp-imageio.jar.(https:// ...
- 使用HIBERNATE的SQL查询并将结果集自动转换成POJO
在某些场合下,我们可能想使用HIBERNATE的框架提供的SQL查询接口,但是,由于实体没有做映射,HIBERNATE不能把结果集转换成你想要的List<POJO>,本文讨论如何在这种情况 ...
- hlg 2130 状压dp
基本的状压dp 需要注意的是两点之间直线最短 所以不需要进行floyd 由于把dp的memset放在了初始化0的后面de了好久的bug.. #include<stdio.h> #inclu ...
- php调用empty出现错误Can't use function return value in write context
php调用empty出现错误Can't use function return value in write context 2012-10-28 09:33:22 | 11391次阅读 | 评论:0 ...
- Web Service性能测试方案
目录: 1.web Service简介 2.SoapUI介绍 3.使用SoapUI进行web service性能测试 4.使用LR进行web service性能测试 5.使用JMeter进行web s ...
- A Realistic Evaluation of Memory Hardware Errors and Software System Susceptibility
http://www.cs.rochester.edu/~kshen/papers/usenix2010-li.pdf Abstract Memory hardware reliability is ...
- 【转】javascript 中that的含义示例介绍
var that = this;,这代表什么意思呢?this代表的是当前对象,var that=this就是将当前的this对象复制一份到that变量中,下面为大家介绍这样做有什么意义 你可能会发现别 ...