[从今天开始修炼数据结构]图的最短路径 —— 迪杰斯特拉算法和弗洛伊德算法的详解与Java实现
在网图和非网图中,最短路径的含义不同。非网图中边上没有权值,所谓的最短路径,其实就是两顶点之间经过的边数最少的路径;而对于网图来说,最短路径,是指两顶点之间经过的边上权值之和最少的路径,我们称路径上第一个顶点是源点,最后一个顶点是终点。
我们讲解两种求最短路径的算法。第一种,从某个源点到其余各顶点的最短路径问题。
1,迪杰斯特拉(Dijkstra)算法
迪杰斯特拉算法是一个按路径长度递增的次序产生最短路径的算法,每次找到一个距离V0最短的点,不断将这个点的邻接点加入判断,更新新加入的点到V0的距离,然后再找到现在距离V0最短的点,循环之前的步骤。有些类似之前的普里姆算法,是针对点进行运算,贪心算法。
这里我们首先约定,Vi在vertex[]中存储的index = i,以方便阐述思路。思路如下:
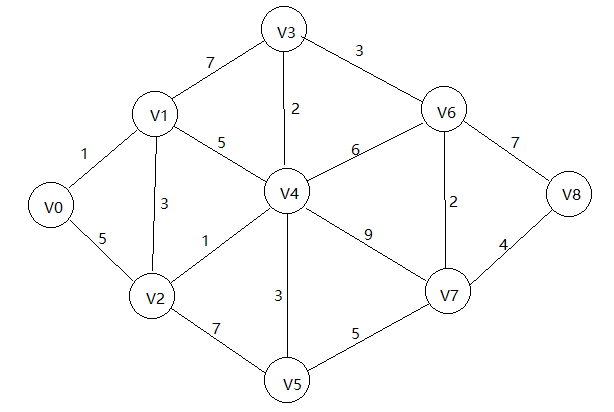
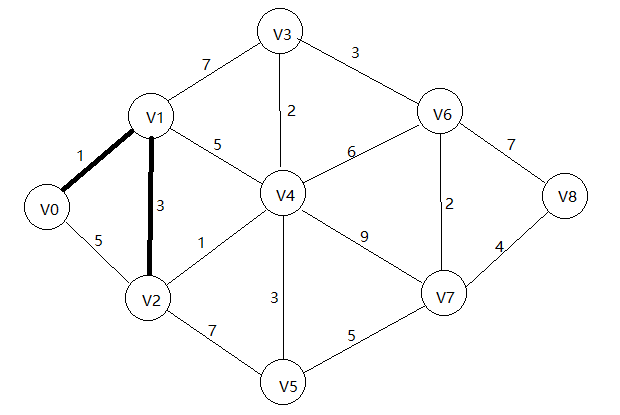
(1)我们拿到网图,如下.我们要找到从V0到V8的最短路径,使用邻接矩阵存储的图结构。我们寻找距离V0最近的顶点,找到了邻接点V1,距离是1,将其连入最短路径。
(2)修正与V1直接相关联的所有点到V0的最短路径。比如原本V2到V0的路径是5,现在通过V1,将其修改为1+3 = 4.,将V4置为6,V3置为8.我们现在就需要一个数组来存储每个点到V0的最短路径了。我们设置一个数组ShortPathTable[numVertex]来存储。
同时我们还需要存储每个点到V0的最短路径,为此我们设置一个数组Patharc[numVertex],P[i] = k表示Vi到V0的最短路径中,Vi的前驱是Vk。我们还需要一个数组来存储某个顶点是否已经找到了到V0的最短路径,为此我们设置finals[numVertex]。此时
S[] = { 0 , 1 , 4 , 8 , 6 , I , I , I , I }
P[] = { 0 , 0 , 1 , 1 , 1 , 0 , 0 , 0 , 0 }
f[] = { 1 , 1 , 0 , 0 , 0 , 0 , 0 , 0 , 0 }
(3)此时拿到与V0距离最短的点(还没有加入最短路径的,即final[i] = 0的点),这里是V2,然后更新V2的邻接点V4,V5到V0的最短路径分别为1+3+1=5和1+3+7=11,并将V2加入最短路径
S[] = { 0 , 1 , 4 , 8 , 5 , I , I , I , I }
P[] = { 0 , 0 , 1 , 1 , 2 , 0 , 0 , 0 , 0 }
f[] = { 1 , 1 , 1 , 0 , 0 , 0 , 0 , 0 , 0 }
接下来的步骤跟前面类似,我就不再重复了,大家应该也理解迪杰斯特拉算法的步骤了,下面来看代码实现。
public void ShortestPath_Dijkstra(){
int[] ShortPathTable= new int[numVertex];
int[] Patharc = new int[numVertex];
int[] finals = new int[numVertex];
//初始化
for (int i = 0; i < numVertex; i++){
ShortPathTable[i] = edges[0][i]; //初始化为v0的邻接边
Patharc[i] = 0;
finals[i] = 0;
}
finals[0] = 1; //v0无需找自己的邻边
int minIndex = 0; //用来保存当前已经发现的点中到V0距离最短的点
for (int i = 1; i < numVertex; i++){
//找到目前距离V0最近的点
int min = INFINITY;
for (int index = 0; index < numVertex; index++){
if (finals[index] != 1 && ShortPathTable[index] < min){
minIndex = index;
min = ShortPathTable[index];
}
}
finals[minIndex] = 1;
//更新还未加入最短路径的点到V0的距离
for (int index = 0; index < numVertex; index++){
if (finals[index] != 1 && (ShortPathTable[index] > (min + edges[minIndex][index]))){
ShortPathTable[index] = min + edges[minIndex][index];
Patharc[index] = minIndex;
}
}
}
//输出最短路径
int s = 8;
System.out.println(8);
while ( s != 0){
s = Patharc[s];
System.out.println(s);
}
}
其实根据这个算法得到了v0到任意一个顶点的最短路径和路径长度的。时间复杂度O(n方)。
如果我们想得到v1,或者v2等到任意一个顶点的最短路径呢?我们要再跑一次这个算法才能得到这样复杂度就达到了O(n3),这是我们所不能接受的。下面我们来介绍一种直接得到每一个顶点到另外一个顶点的最短路径。
2,弗洛伊德(Floyd)算法
弗洛伊德算法的想法是,如果V1到V2的距离,大于V1到V0再从V0到V2的距离,那么就把V1到V0的权值的拷贝,改为V1到V0+V0到V2. 同时把储存的最短路径也改掉,直到网中的每一条边都被遍历。
我们用二维矩阵ShortPathTable存储行号到列号的最短路径的权值之和(初始化为邻接矩阵);Patharc存储行号到列号的最短路径中列号元素的前驱。初始化如下
举例如下: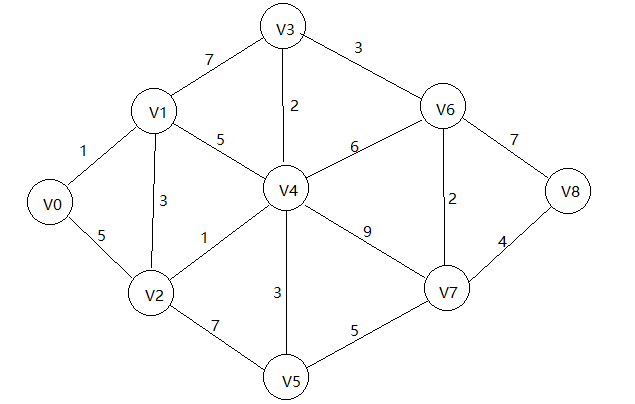
ShortPathTable矩阵: 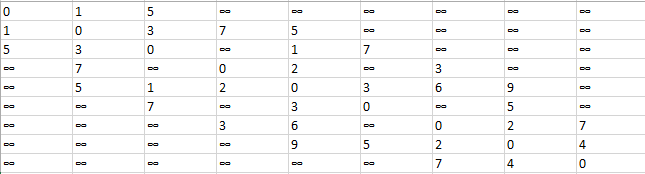 Patharc矩阵:
Patharc矩阵: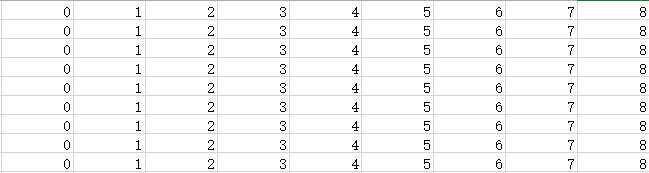
(1)从V0进入网图中,此时没有什么需要变化的。
(2)到达V1,让所有的顶点的路径都从V1经过,发现V0到V2的路径大于先到V1再到V2的路径,所以将S矩阵和P矩阵中的相应位置更改。同理S[0][3] = 8, S[0][4] = 6。

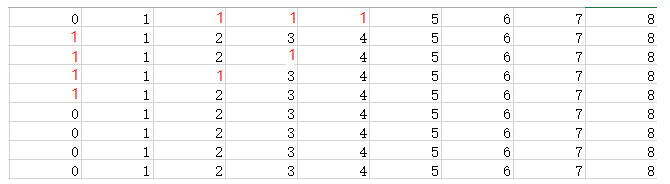
后面同理,依次循环V2~V8,针对每个顶点作为中转得到计算结果。这样我们的最短路径就完成了。
实现代码如下:
public void ShortestPath_Floyd(){
int[][] ShortPathTable = new int[numVertex][numVertex];
int[][] Patharc = new int[numVertex][numVertex];
//初始化两个矩阵
for (int row = 0; row < numVertex; row++){
for (int col = 0; col < numVertex; col++){
ShortPathTable[row][col] = edges[row][col];
Patharc[row][col] = col;
}
}
for (int path = 0; path < numVertex; path++){
for (int row = 0; row < numVertex; row++){
for (int col = 0; col < numVertex; col++){
if (ShortPathTable[row][col] > (ShortPathTable[row][path] + ShortPathTable[path][col])){
ShortPathTable[row][col] = (ShortPathTable[row][path] + ShortPathTable[path][col]);
Patharc[row][col] = Patharc[row][path];
}
}
}
}
//打印看结果
for (int row = 0; row < numVertex; row++) {
for (int col = 0; col < numVertex; col++) {
System.out.print(ShortPathTable[row][col] + "\t");
}
System.out.println();
}
System.out.println("***********************************");
for (int row = 0; row < numVertex; row++) {
for (int col = 0; col < numVertex; col++) {
System.out.print(Patharc[row][col] + "\t");
}
System.out.println();
}
}
结果:
0 1 4 7 5 8 10 12 16
1 0 3 6 4 7 9 11 15
4 3 0 3 1 4 6 8 12
7 6 3 0 2 5 3 5 9
5 4 1 2 0 3 5 7 11
8 7 4 5 3 0 7 5 9
10 9 6 3 5 7 0 2 6
12 11 8 5 7 5 2 0 4
16 15 12 9 11 9 6 4 0
***********************************
0 1 1 1 1 1 1 1 1
0 1 2 2 2 2 2 2 2
1 1 2 4 4 4 4 4 4
4 4 4 3 4 4 6 6 6
2 2 2 3 4 5 3 3 3
4 4 4 4 4 5 7 7 7
3 3 3 3 3 7 6 7 7
6 6 6 6 6 5 6 7 8
7 7 7 7 7 7 7 7 8
我们可以发现,P矩阵的第一列与迪杰斯特拉算法的结果是一样的。它的时间复杂度是三次方的,但它可以解决多个顶点到多个顶点的最短路径问题,比同样场景下的迪杰斯特拉算法要省时得多。
上面是两个算法对于无向图的应用,实际上对于有向图,也是同样的使用效果。因为无向图和有向图的区别仅仅是邻接矩阵是否对称而已。
[从今天开始修炼数据结构]图的最短路径 —— 迪杰斯特拉算法和弗洛伊德算法的详解与Java实现的更多相关文章
- 图的最短路径---迪杰斯特拉(Dijkstra)算法浅析
什么是最短路径 在网图和非网图中,最短路径的含义是不一样的.对于非网图没有边上的权值,所谓的最短路径,其实就是指两顶点之间经过的边数最少的路径. 对于网图,最短路径就是指两顶点之间经过的边上权值之和最 ...
- 理解最短路径——迪杰斯特拉(dijkstra)算法
原址地址:http://ibupu.link/?id=29 1. 迪杰斯特拉算法简介 迪杰斯特拉(dijkstra)算法是典型的用来解决最短路径的算法,也是很多教程中的范例,由荷兰计算机科 ...
- 最短路径之迪杰斯特拉(Dijkstra)算法
迪杰斯特拉(Dijkstra)算法主要是针对没有负值的有向图,求解其中的单一起点到其他顶点的最短路径算法.本文主要总结迪杰斯特拉(Dijkstra)算法的原理和算法流程,最后通过程序实现在一个带权值的 ...
- 数据结构图之三(最短路径--迪杰斯特拉算法——转载自i=i++
数据结构图之三(最短路径--迪杰斯特拉算法) [1]最短路径 最短路径?别乱想哈,其实就是字面意思,一个带边值的图中从某一个顶点到另外一个顶点的最短路径. 官方定义:对于内网图而言,最短路径是指两 ...
- 数据结构与算法——迪杰斯特拉(Dijkstra)算法
tip:这个算法真的很难讲解,有些地方只能意会了,多思考多看几遍还是可以弄懂的. 应用场景-最短路径问题 战争时期,胜利乡有 7 个村庄 (A, B, C, D, E, F, G) ,现在有六个邮差, ...
- 图->最短路径->单源最短路径(迪杰斯特拉算法Dijkstra)
文字描述 引言:如下图一个交通系统,从A城到B城,有些旅客可能关心途中中转次数最少的路线,有些旅客更关心的是节省交通费用,而对于司机,里程和速度则是更感兴趣的信息.上面这些问题,都可以转化为求图中,两 ...
- 最短路径 - 迪杰斯特拉(Dijkstra)算法
对于网图来说,最短路径,是指两顶点之间经过的边上权值之和最少的路径,并且我们称路径上的第一个顶点为源点,最后一个顶点为终点.最短路径的算法主要有迪杰斯特拉(Dijkstra)算法和弗洛伊德(Floyd ...
- 单源最短路径-迪杰斯特拉算法(Dijkstra's algorithm)
Dijkstra's algorithm 迪杰斯特拉算法是目前已知的解决单源最短路径问题的最快算法. 单源(single source)最短路径,就是从一个源点出发,考察它到任意顶点所经过的边的权重之 ...
- 最短路径-迪杰斯特拉(dijkstra)算法及优化详解
简介: dijkstra算法解决图论中源点到任意一点的最短路径. 算法思想: 算法特点: dijkstra算法解决赋权有向图或者无向图的单源最短路径问题,算法最终得到一个最短路径树.该算法常用于路由算 ...
随机推荐
- img标签不能直接作为body的子元素
前几天在一本教材上看到关于HTML标签嵌套规则一节的时候,看到这么一句话,“把图像作为body元素的子元素直接插入到页面中,这样是不妥的,一是结构嵌套有误,二是图像控制不方便.”后面还给了一段代码演示 ...
- Vue注册组件命名时不能用大写的原因浅析
命名使用注意事项: https://www.jb51.net/article/160227.htm
- MySQL数据库优化技巧有哪些?
开启查询缓存,优化查询. explain你的select查询,这可以帮你分析你的查询语句或是表结构的性能瓶颈.EXPLAIN的查询结果还会告诉你你的索引主键被如何利用的,你的数据表是如何被搜索和排序的 ...
- html学习笔记--xdd
<!DOCTYPE html> <html> <head> <title>HTML学习笔记</title> <meta charset ...
- NTP服务搭建详解一条龙
说在前面:ntp和ntpdate区别 ①两个服务都是centos自带的(centos7中不自带ntp).ntp的安装包名是ntp,ntpdate的安装包是ntpdate.他们并非由一个安装包提供. ② ...
- scrapy实现自动抓取51job并分别保存到redis,mongo和mysql数据库中
项目简介 利用scrapy抓取51job上的python招聘信息,关键词为“python”,范围:全国 利用redis的set数据类型保存抓取过的url,现实避免重复抓取: 利用脚本实现每隔一段时间, ...
- 痞子衡嵌入式:恩智浦i.MX RTxxx系列MCU启动那些事(1)- Boot简介
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是恩智浦i.MX RTxxx系列MCU的BootROM功能简介. 截止目前为止i.MX RTxxx系列已公布的芯片仅有一款i.MXRT60 ...
- C语言I博客作业10
这个作业属于那个课程 C语言程序设计II 这个作业要求在哪里 https://edu.cnblogs.com/campus/zswxy/CST2019-1/homework/10095 我在这个课程的 ...
- Prometheus 【目录】
正在陆续更新,内容大体包括: rule.标签重置.cAdversior.自动发现(File 自动发现.DNS自动发现.k8s环境自动发现)等... 目录: prometheus[第一篇] Promet ...
- 1. Python 基础概述 和 环境安装
目录 Python 推荐书籍 开发环境 - Pyenv pyenv 使用 设置Python版本 virtualenv 虚拟环境 pip 通用配置 pip导出和导入 Jupyter 安装和配置 安装 j ...