点云深度学习的3D场景理解
转载请注明本文链接:
https://www.cnblogs.com/Libo-Master/p/9759130.html
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
Paper reading:Frustum PointNets for 3D Object Detection from RGB-D Data
-------------------------------------------------------------------------------------------------------------------------------------
前言:
近期刚刚开始调研3D场景理解,下文是对point,point net++,frustum point 的一些整理和总结,内容包括如何将点云进行深度学习,如何设计新型的网络架构,如何将架构应用的3D场景理解。
背景:
进来很多3D的应用在兴起,3D传感器在进步,随着虚拟网络的发展转到物理实际中的应用,比如(ADAS,AR,MR)自动驾驶中需要理解 汽车行人交通标识,同时也需要理解三维物体的状态静至,移动。
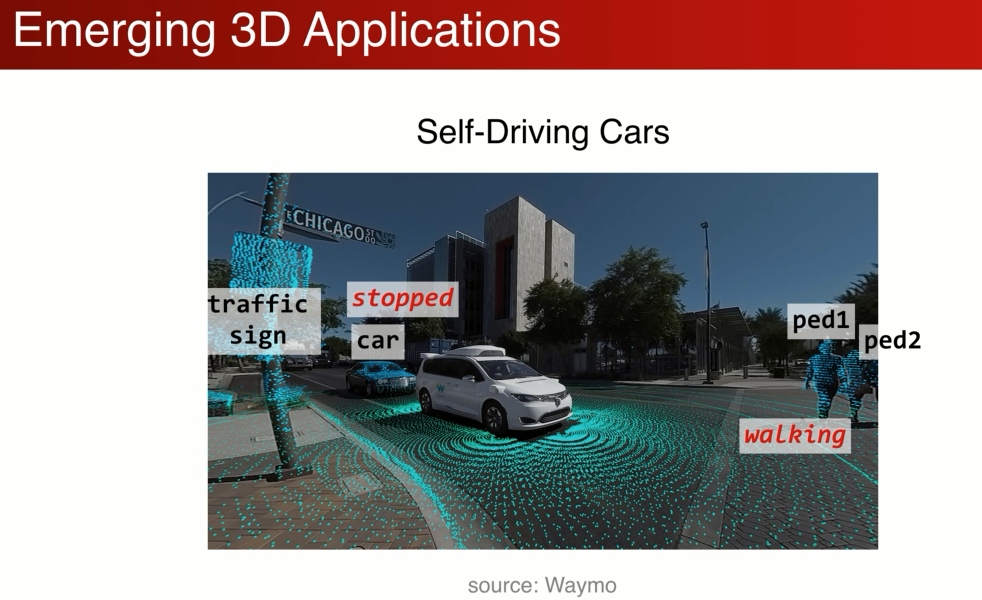

AR头戴显示器有深度传感器,也需要做三维场景的理解。例如把todo_list合适的放到冰箱的门上。
需要一种数据驱动的方式去理解和处理三维数据,3D deep learning。
三维表达的形式:
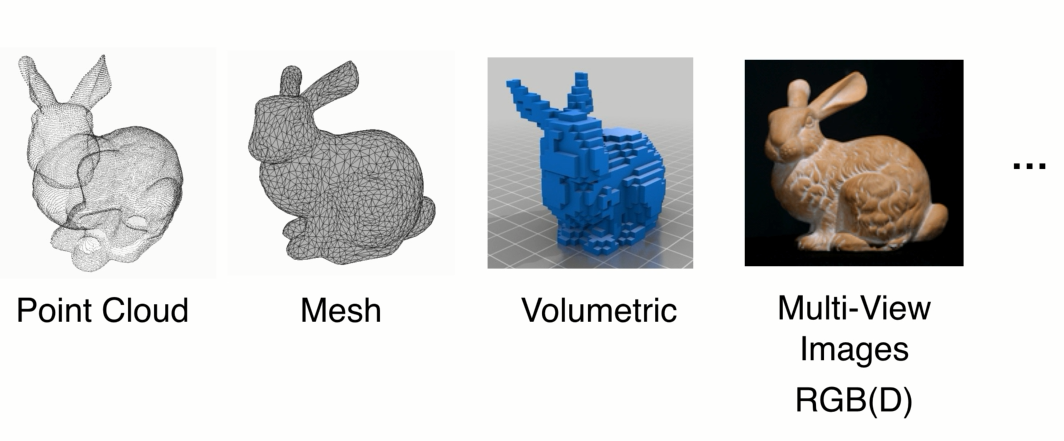
三维数据本身有一定的复杂性,2D图像可以轻易的表示成矩阵,3D表达形式由应用驱动的:
point cloud ,深度传感器扫描得到的深度数据,点云
Mesh,三角面片在计算机图形学中渲染和建模话会很有用。
Volumetric,将空间划分成三维网格,栅格化。
Multi-View,用多个角度的图片表示物体。
Point c'loud 是一种非常适合于3D场景理解的数据,原因是:
1、点云是非常接近原始传感器的数据集,激光雷达扫描之后的直接就是点云,深度传感器(深度图像)只不过是一个局部的点云,原始的数据可以做端到端的深度学习,挖掘原始数据中的模式
2、点云在表达形式上是比较简单的,一组点。相比较来说
Mesh需要选择面片类型和如何连接
网格需要选择多大的网格,分辨率。
图像的选择,需要选择拍摄的角度,但是表达是不全面的。
最近才有一些方法研究直接在点云上进行特征学习,之前的大部分工作都是集中在手工设计点云数据的:
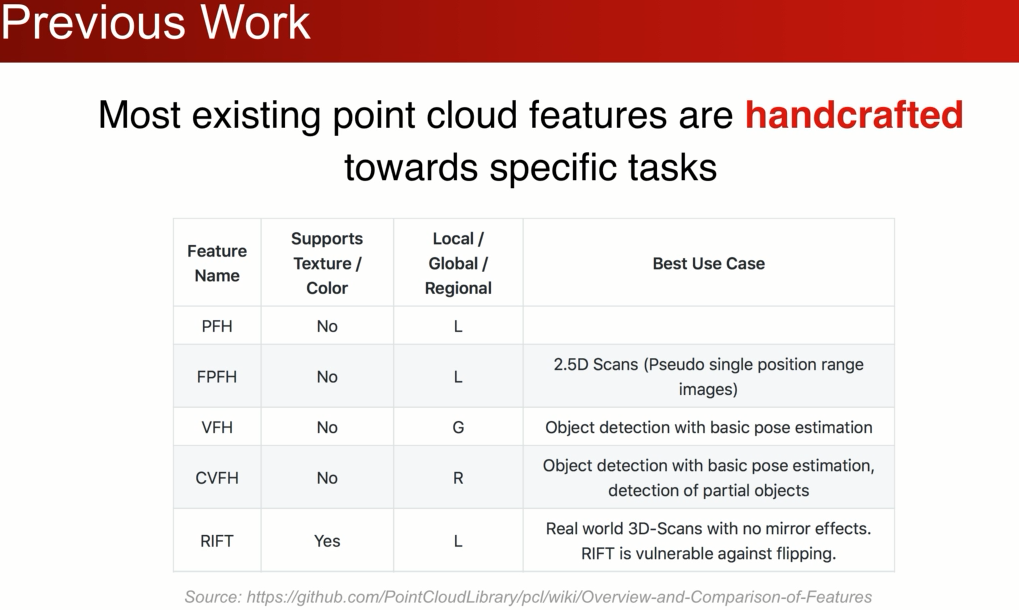
这些特征都是针对特定任务,有不同的假设,新的任务很难优化特征。 希望用深度学习特征学习去解 决数据的问题。
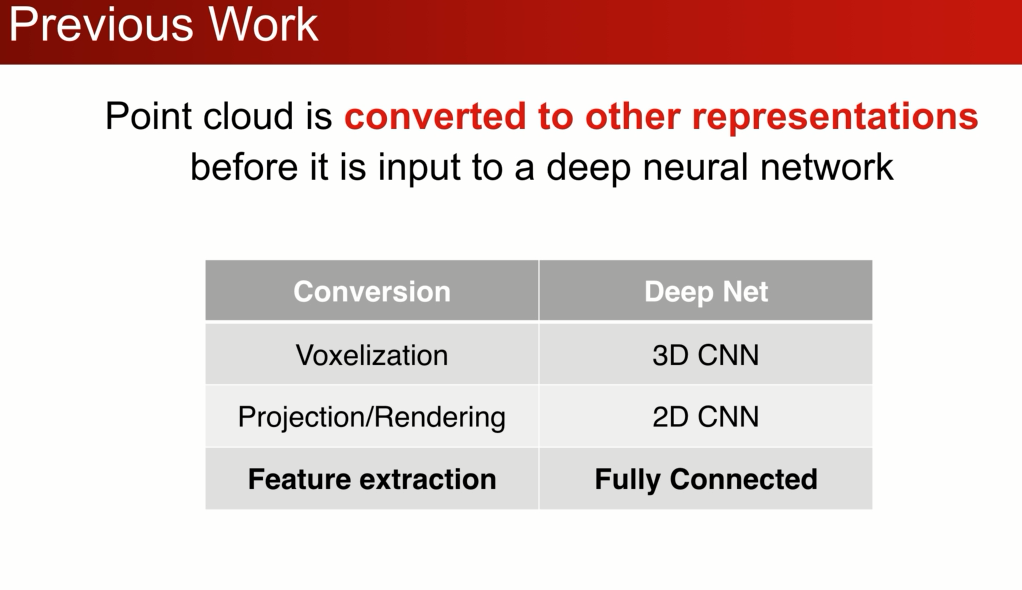
但是点云数据是一种不规则的数据,在空间上和数量上可以任意分布,之前的研究者在点云上会先把它转化成一个规则的数据,比如栅格让其均匀分布,然后再用3D-cnn 来处理栅格数据:
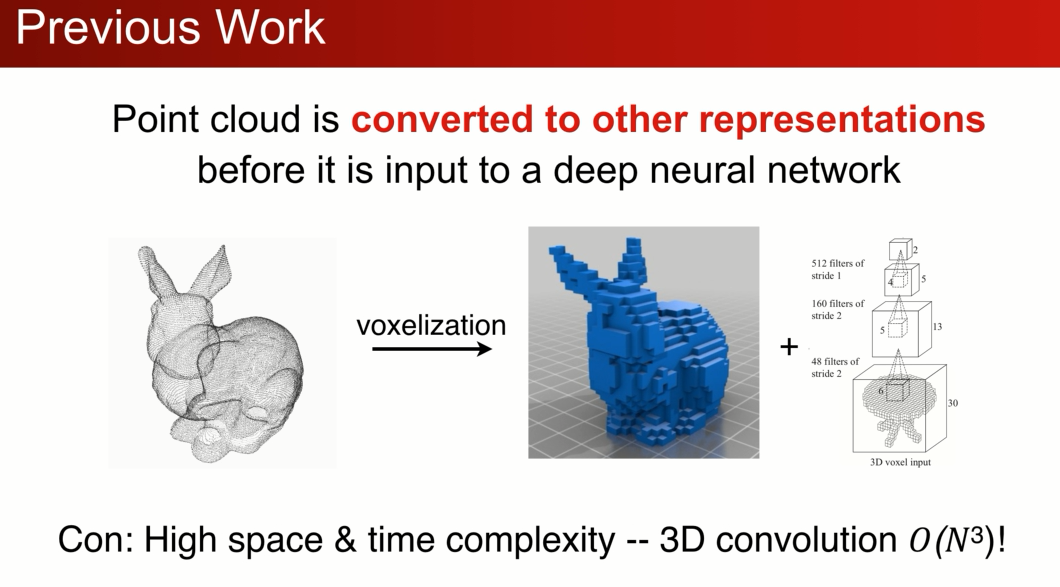
缺点:3D cnn 复杂度相当的高,三次方的增长,所以分辨率不高30*30*30 相比图像是很低的,带来了量化的噪声错误,限制识别的错误
1、但是如果考虑不计复杂度的栅格,会导致大量的栅格都是空白,智能扫描到表面,内部都是空白的。所以栅格并不是对3D点云很好的一种表达方式
2、有人考虑过,用3D点云数据投影到2D平面上用2D cnn 进行训练,这样会损失3D的信息。 还要决定的投影的角度
3、点云中提取手工的特征,再接FC,这么做有很大的局限性
我们能否直接用一种在点云上学习的方法:统一的框架
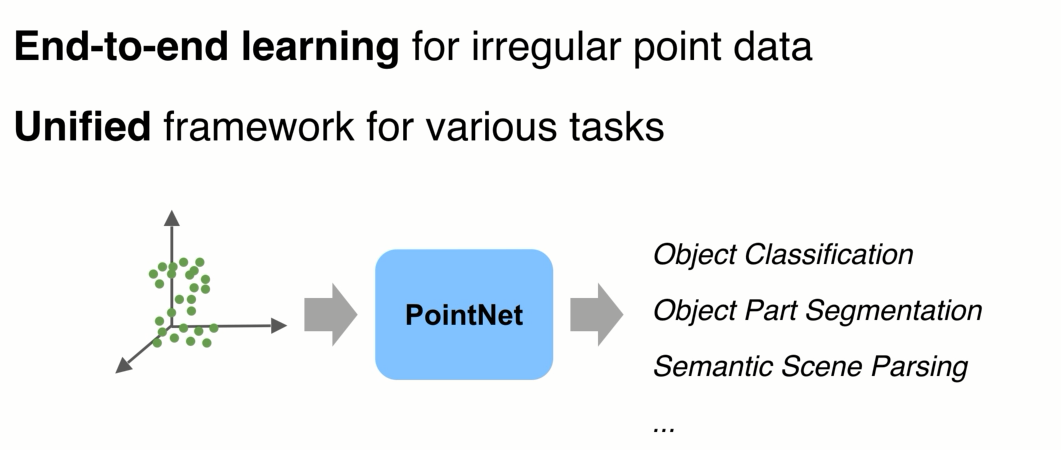

网络设计:
网络设计有两种点云的特点决定的:
1、点云是数据的表达点的集合,对点的顺序不敏感
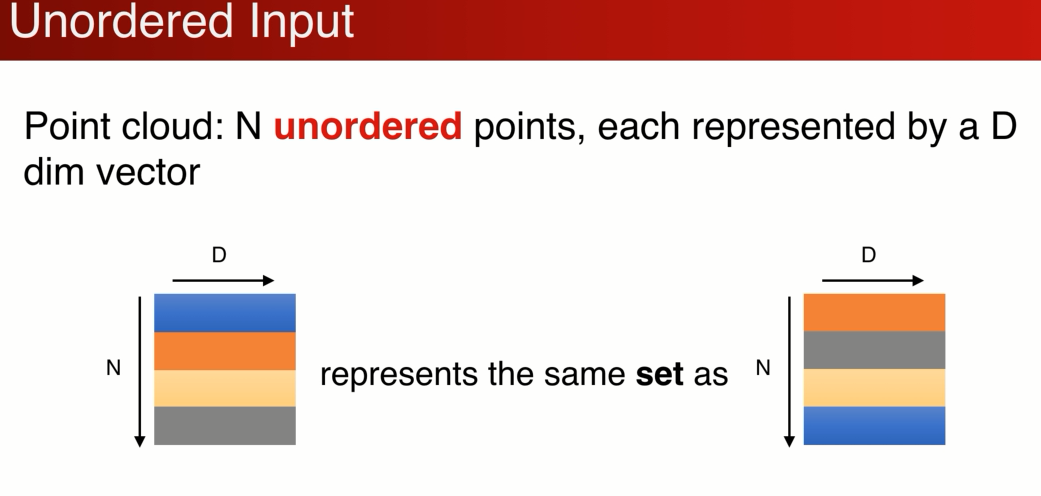
D维的特征,最简单的D=3,还可以有其他颜色,法向
点集是无序的,可以做变化,背后的代表的是同一套点集,置换不变性。 模型需要对N!网络需要做到置换的不变性。
系统化的解决方案,对称函数,具有置换不变性。神经网络本质是一个函数
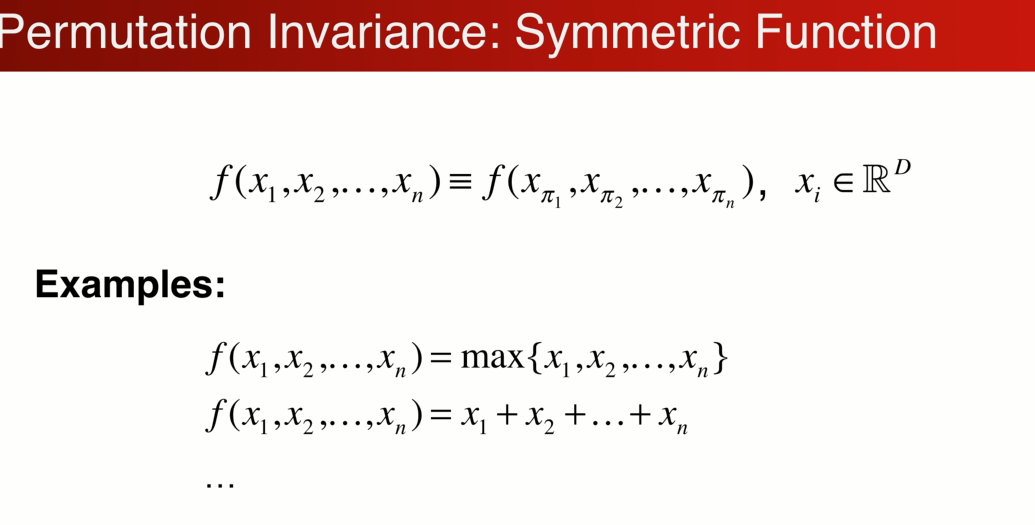

如何用神经网络构建对称函数:最简单的例子:
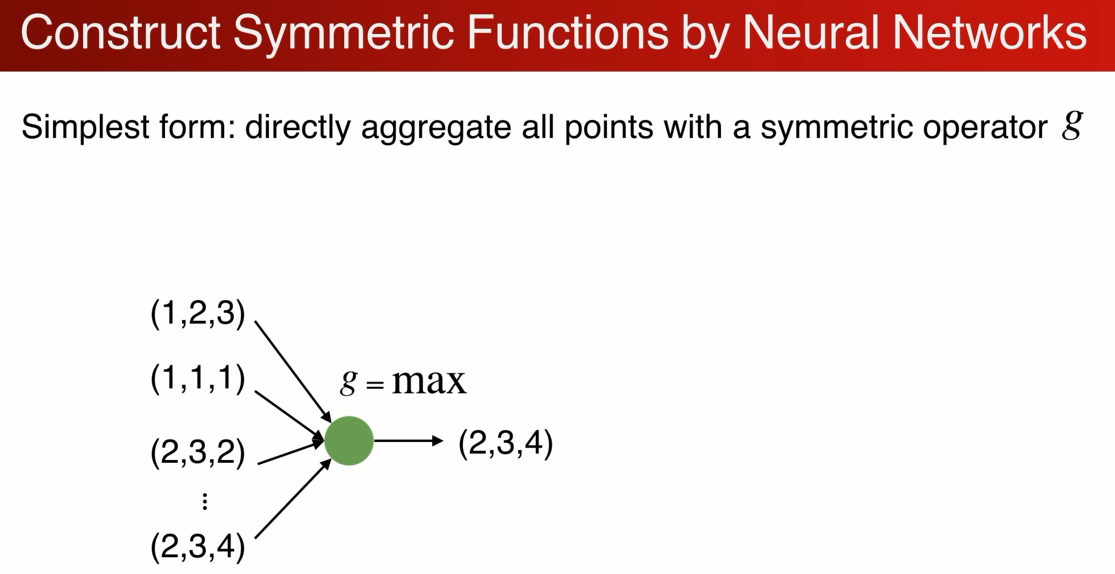

虽然是置换不变的,但是这种方式只计算了最远点的边界,损失了很多有意义的几何信息,如何解决呢?

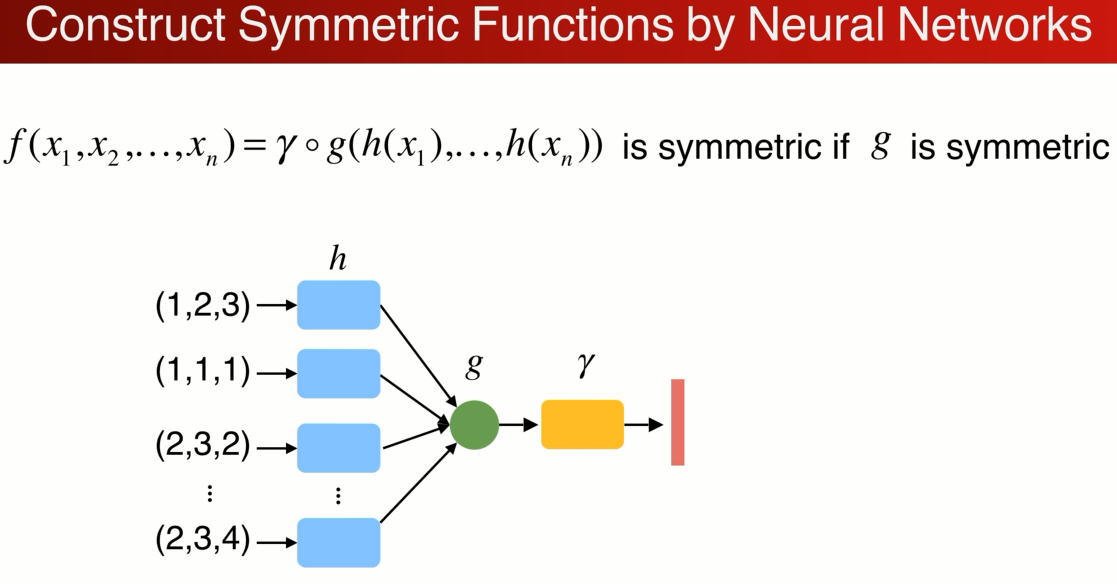
与其说直接做对称性可以先把每个点映射到高维空间,在高维空间中做对称性的操作,高维空间可以是一个冗余的,在max操作中通过冗余可以避免信息的丢失,可以保留足够的点云信息,再通过一个网络r来进一步 消化信息得到点云的特征。这就是函数hgγ的组合。每个点都做h低位到高位的映射,G是对称的那么整个结构就都是对称的。下图就是原始的pointnet结构。
实际操作过程中:
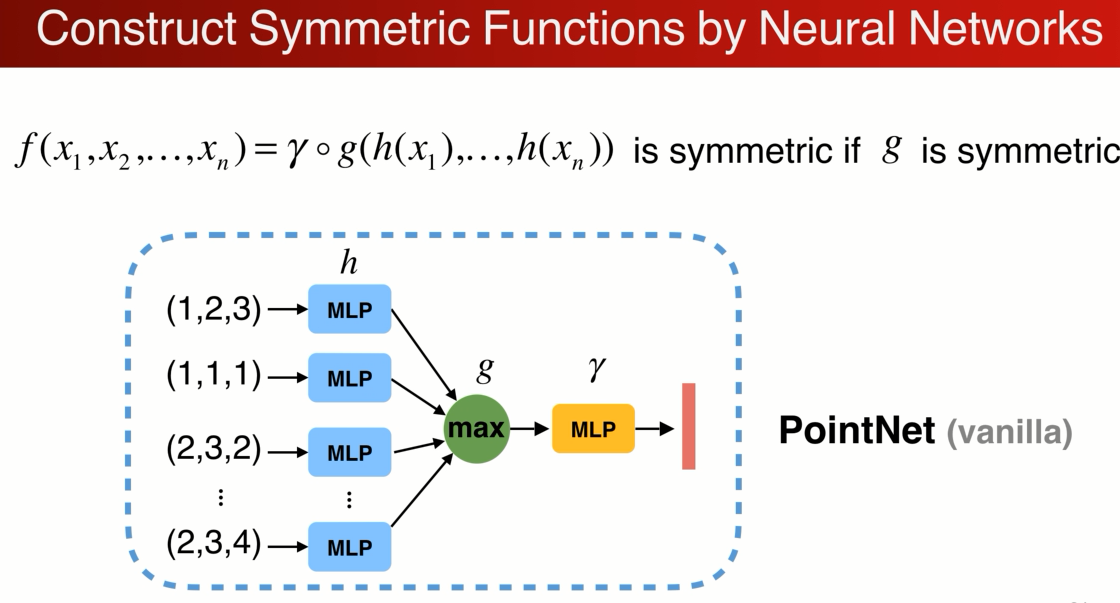
在实际执行过程中
可以用MLP多层感知器(Multilayer perceptron) 来描述h和γ,g max polling 效果最好。
接下来有个很有意思的理论问题,用神经网络构建的pointnet中,保证了对称
那么在所有的对称函数中,point(vanilla)是什么样的位置呢?什么样的函数pointnet 能代表,什么函数不能代表
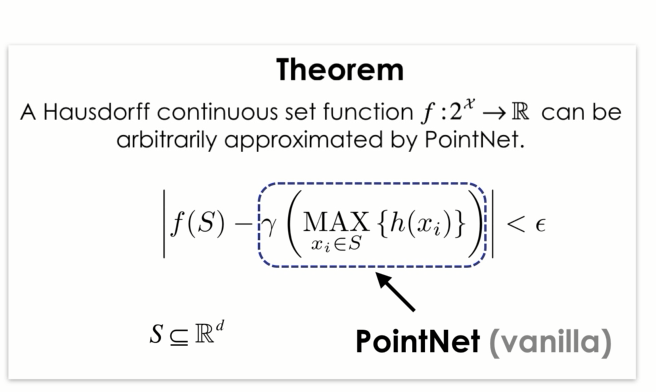
可以得到理论:

pointnet 可以任意的逼近在集合上的对称函数,只要是对称函数是在hausdorff空间是连续的,那么就可以通过任意的增加神经网络的宽度深度,来逼近这个函数
上面解释了如果通过对称函数,来让点云输入顺序的不变
2、如何来应对输入点云的几何(视角)变换,比如一辆车在不同的角度点云的xyz都是不同的 但代表的都是扯,我们希望网络也能应对视角的变换
如果spatial transform network

增加了一个基于数据本身的变换函数模块,n个点(x,y,z) t-net 生成变换参数,之后的网络处理变换之后的点,目标是通过整体优化变换网络和后面的网络使得变换函数对齐输入,如果对齐了,不同视角的问题就可以简化。
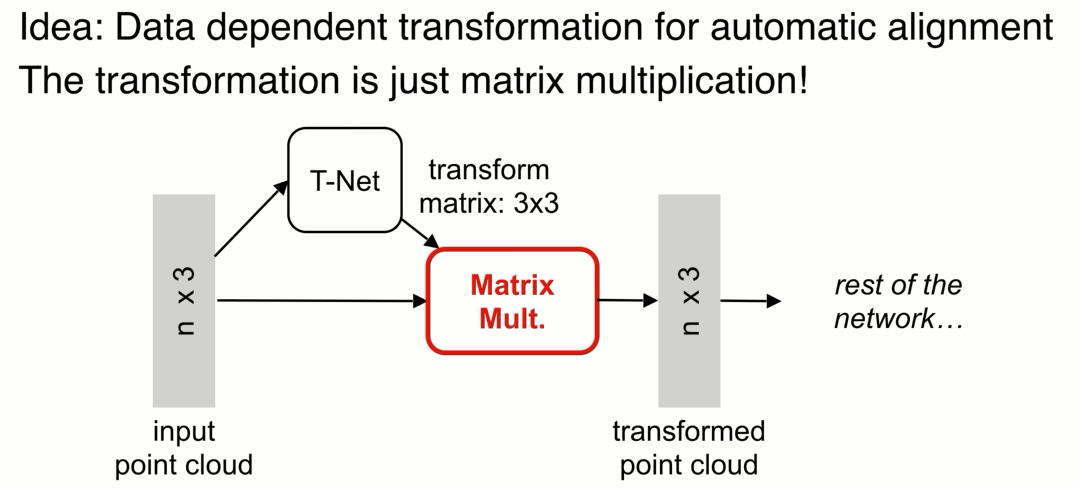
实际中点云的变化很简单,不像图片做变换需要做插值,做矩阵乘法就可以。比如对于一个3*3的矩阵仅仅是一个正交变换,计算容易实现简单
我们可以推广这个操作,不仅仅在输入作此变换,还可以在中间做 N个点 K维特征,用另外网络生成k*k 来做特征空间的变化,生成另一组特征
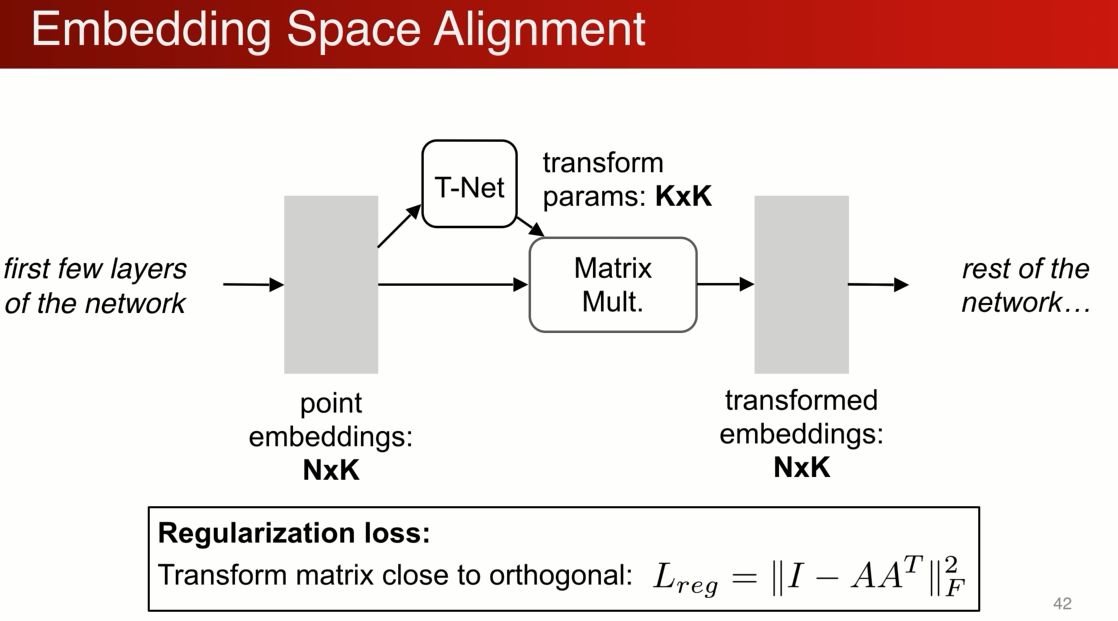
高维优化过程中,难度高,需要加正则化,比如希望矩阵更加接近正交矩阵
那么这些变换的网络如何和pointnet结合起来:得到分类和分割网络
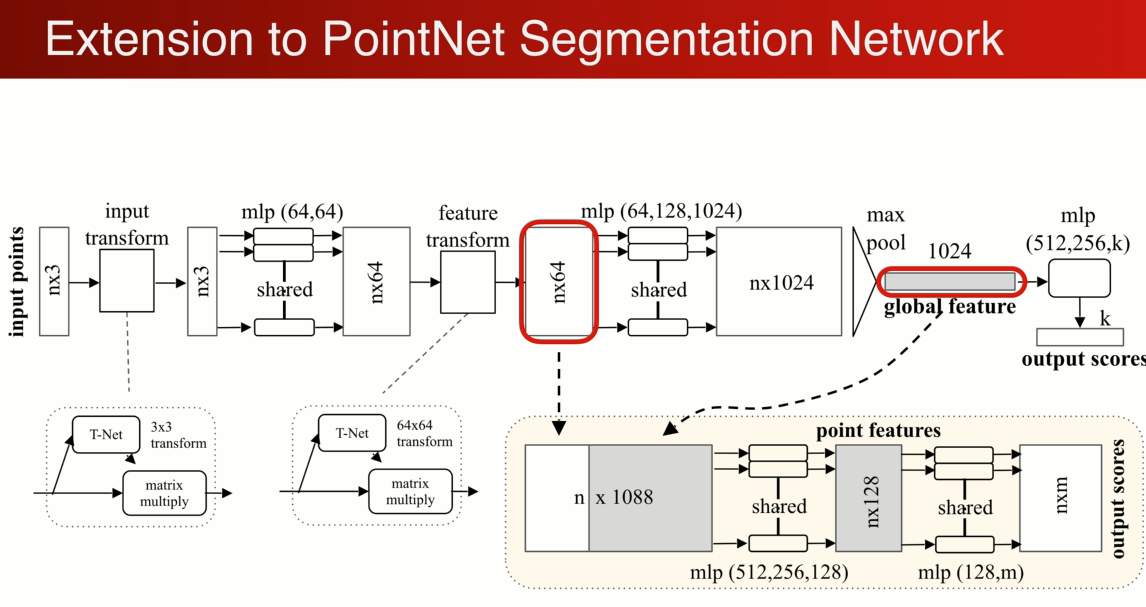
首先输入一个n*3的矩阵,先做一个输入的矩阵变换,T-net 变成一个3*3的矩阵,然后通过mlp把每个点投射到64高维空间,在做一个高维空间的变换,形成一个更加归一化的64维矩阵,继续做MLP将64维映射到1024维,在1024中可以做对称性的操作,就是maxpooling,得到globle fearue,1024维度 ,通过级联的全连接网络生成k (分类)

如果是分割呢?
可以定以成对每个点的分类问题,通过全局坐标是没法对每个点进行分割的,简单有效的做法是,将局部单个点的特征和全局的坐标结合起来,实现分割的功能
最简单的做法是将全局特征重复N遍,和每一个原来单个点的特征连接在一起,相当于单个点在全局特征中进行了一次检索,检索到在哪个位置就是哪个类别,对连接起来的特征进行MLP的变换,最后输出m类相当于m个score:(将单个点和总体的特征连接到一起,判定在总体中的位置,来决定是哪个分类)
结果:
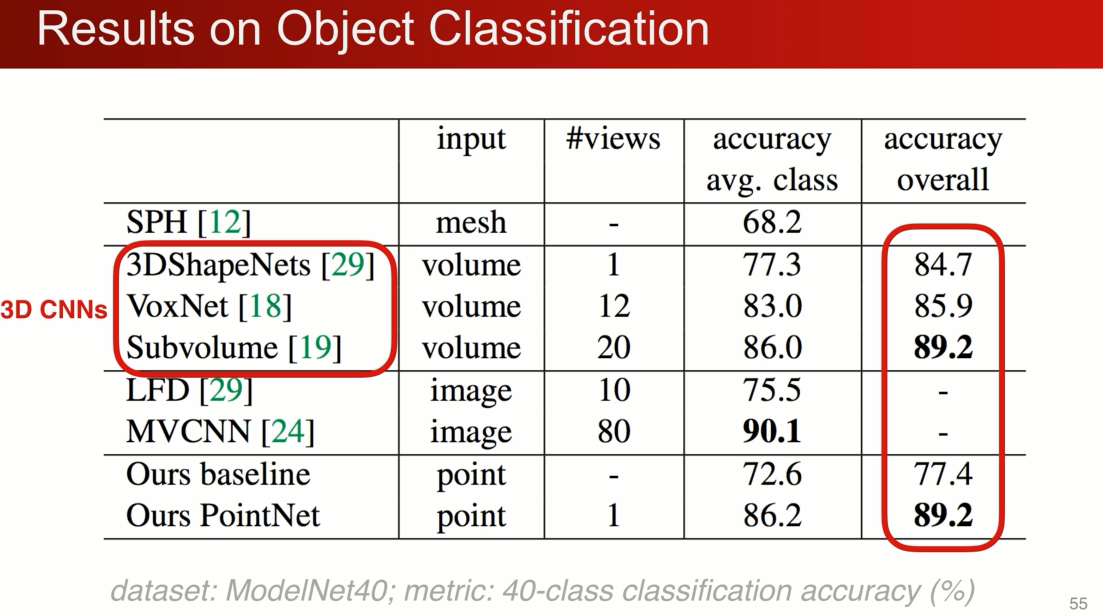
分类,pointnet 当时最早 点云界
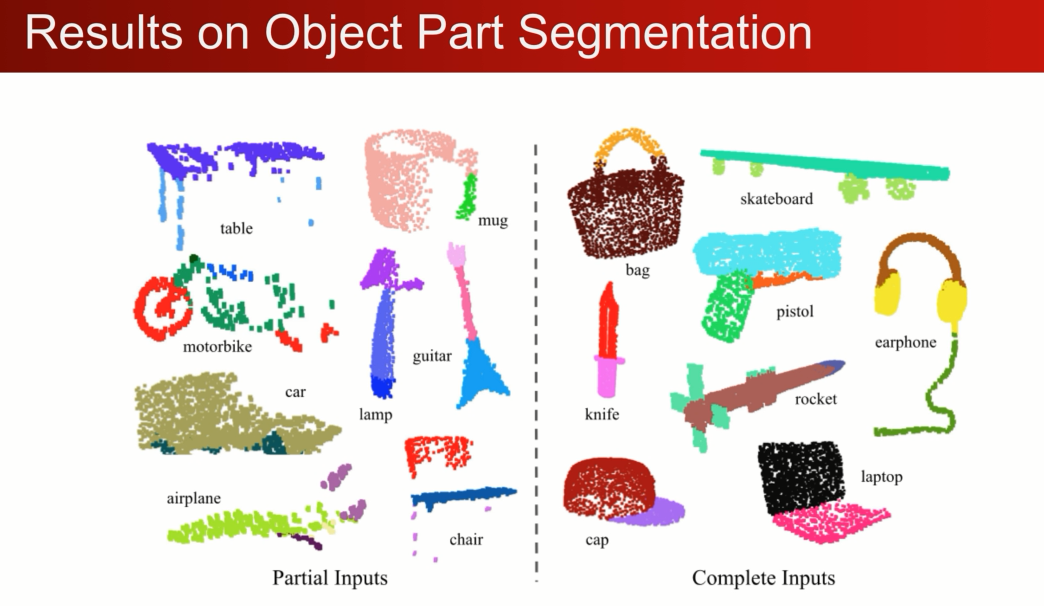
部件分割和完整的分割。shapenetpart

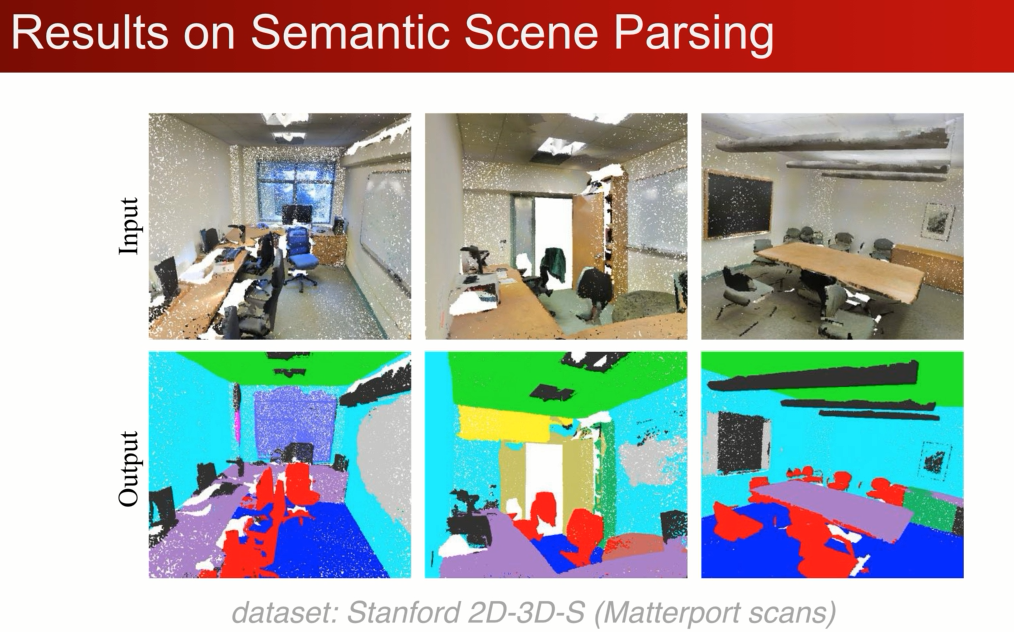
2D-3D-S
还是个非常轻量级的网络:对比2D图片和3D栅格
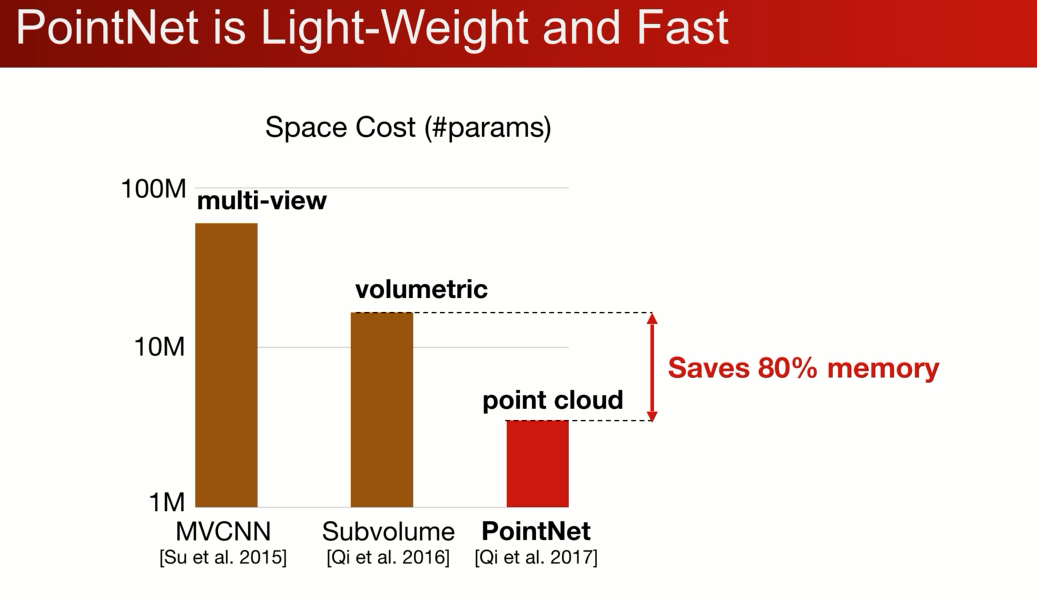
适用于移动设备:

同时对数据的丢失也是非常的鲁棒,对比于voxelnet 的对比
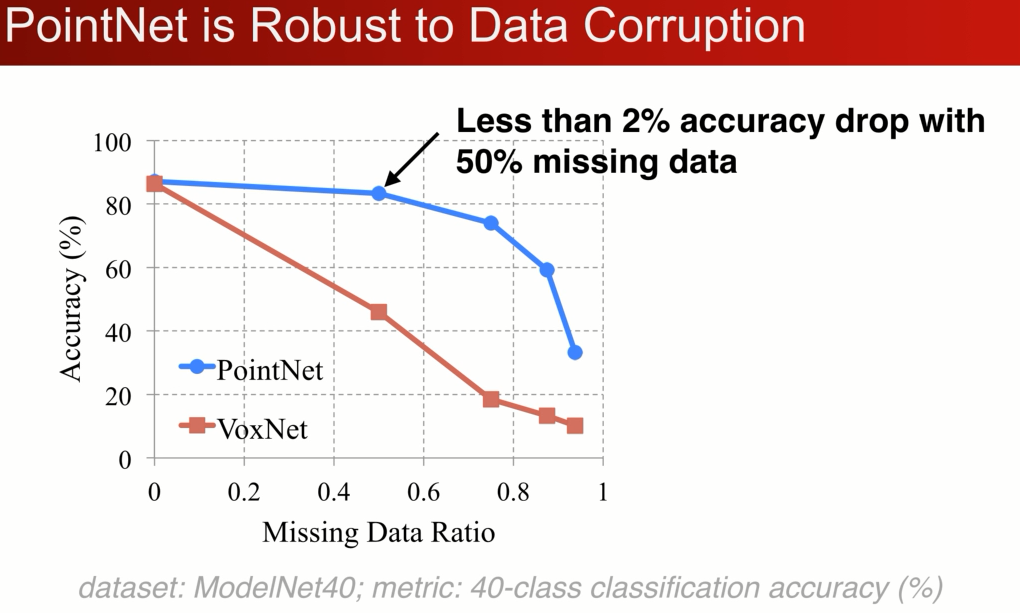
在modelnet 40 的分类问题上,在丢失50%的点的情况下,pointnet仅仅收到2%的影响,与之想想比Voxnet3D精度相差了20%
为什么这么鲁棒呢?
第一行是原始的,我们想知道哪些点对全局特征做出了贡献,maxpooling ,有些点embedded的特征非常小,在经过maxpooling之后对全局特征没有任何的贡献,哪些点是剩下来的胜利者
Critial points (Maxpooling 之后存活下来的大特征点)
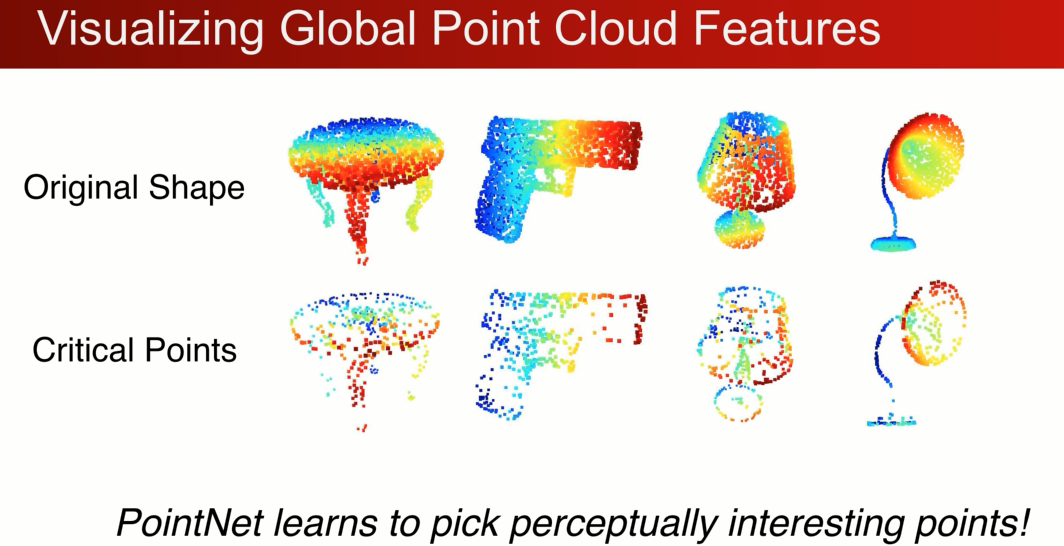
只要轮廓和骨骼得到保存,就能把形状分类正确。
--------------------------------------------------------------------------------------------------------------------
--------------------------------------------------------------------------------------------------------------------
PointNet++
pointnet 缺陷:对比3Dcnn
3D和2D很像,只是变成了3D卷积,多级学习 不断抽象特征,平移不变性。

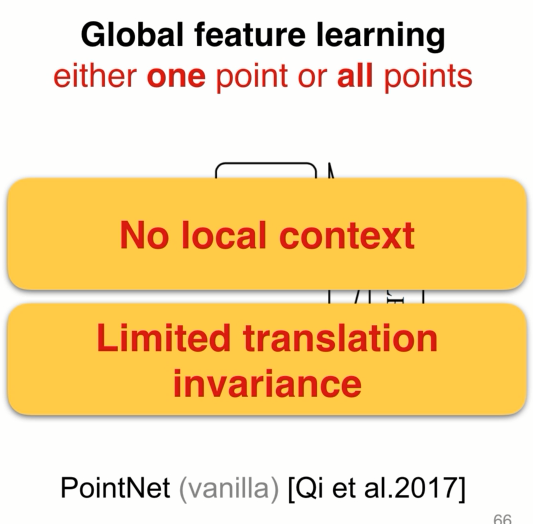
pointnet 一开始对每个点做MLP低维到高维的映射,把所有点映射到高维的特征通过Max pooling 结合到一起
本质上来说,要么对一个点做操作,要么对所有点做操作,实际上没有局部的概念(loal context) ,比较难对精细的特征做学习,在分割上有局限性
2、没有local context 在平移不变性上也有局限性。(世界坐标系和局部坐标系)
(xyz)对点云数据做平移 所有的数据都不一样了,导致所有的特征,全局特征都不一样了,分类也不一样
对于单个的物体还好,可以将其平移到坐标系的中心,把他的大小归一化到一个球中,在一个场景中有多个物体不好办,对哪个物体做归一化呢?
-------------------------
-------------------------
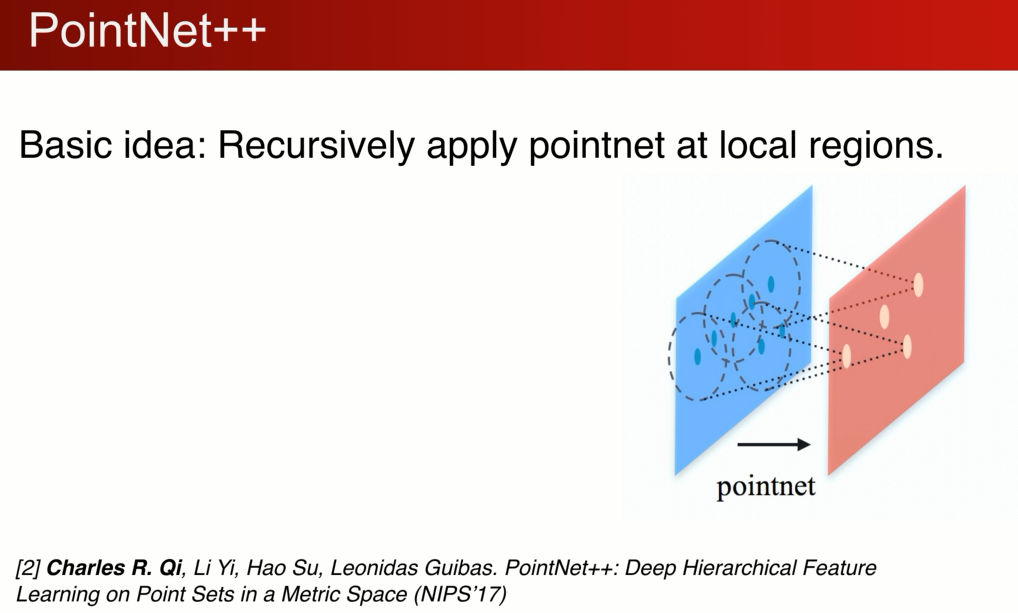
pointnet ++ 核心的想法在局部区域重复性的迭代使用pointnet ,在小区域使用pointnet 生成新的点,新的点定义新的小区域,多级的特征学习,应为是在区域中,我们可以用局部坐标系,可以实现平移的不变性,同时在小区域中还是使用的PN,对点的顺序是无关的,保证置换不变性。
具体的例子: 多级的点云学习:
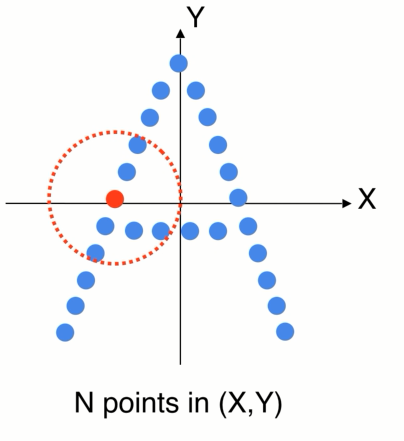

2D卡通的例子,世界坐标系,先找到一个局部的区域,因为不想受整体平移的影响
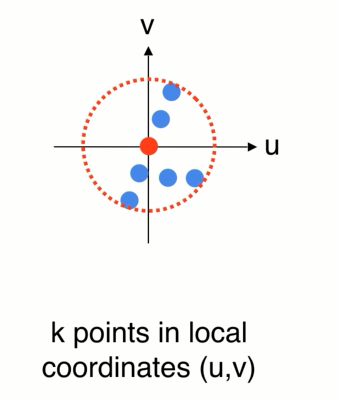
1、可以先把局部的点转换到一个局部坐标系中
2、在局部中使用pointnet 来提取特征
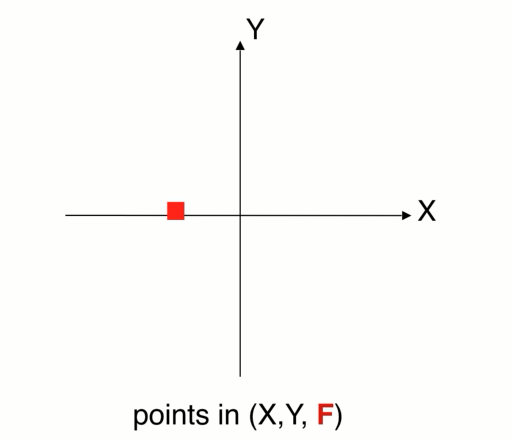
3、提取完特征以后会得到一个新的点,F (x,y )在整个点云中的位置 在欧氏空间中,还有个向量特征F(高纬的特征空间),代表小区域的几何形状,
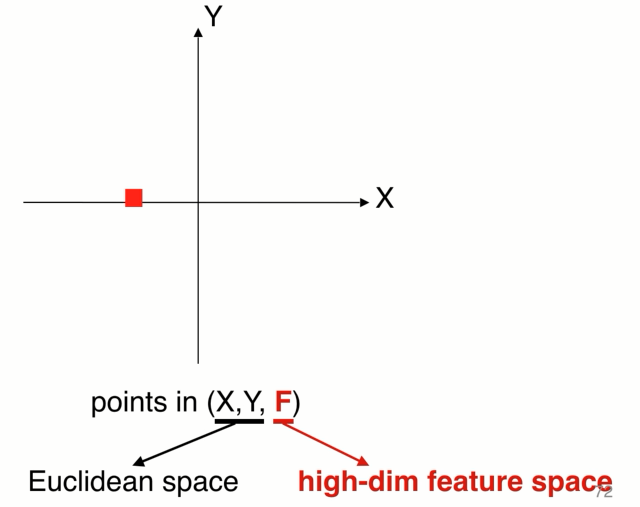
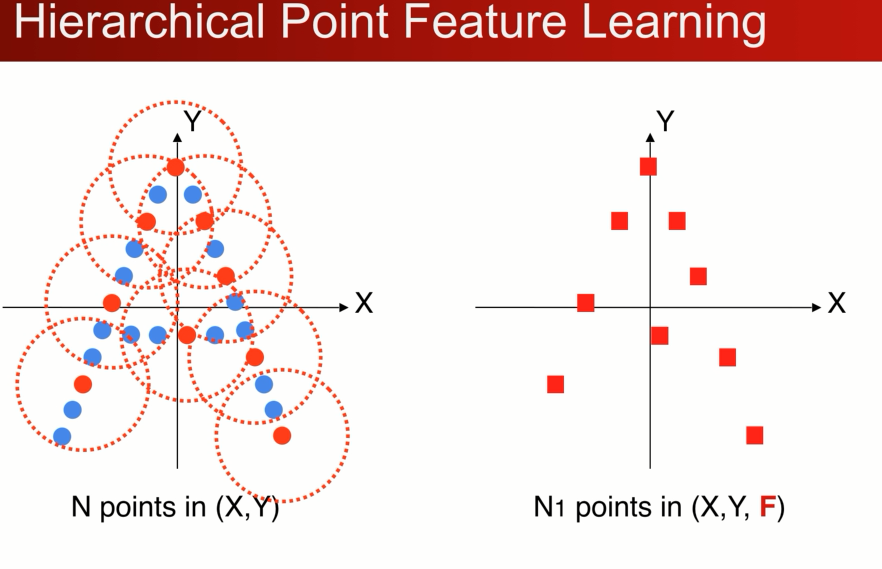
如果重复这个操作就会得到一组新的点,在数量上少于原先的点,但是新的每个点代表了它周围一个区域的几何特点

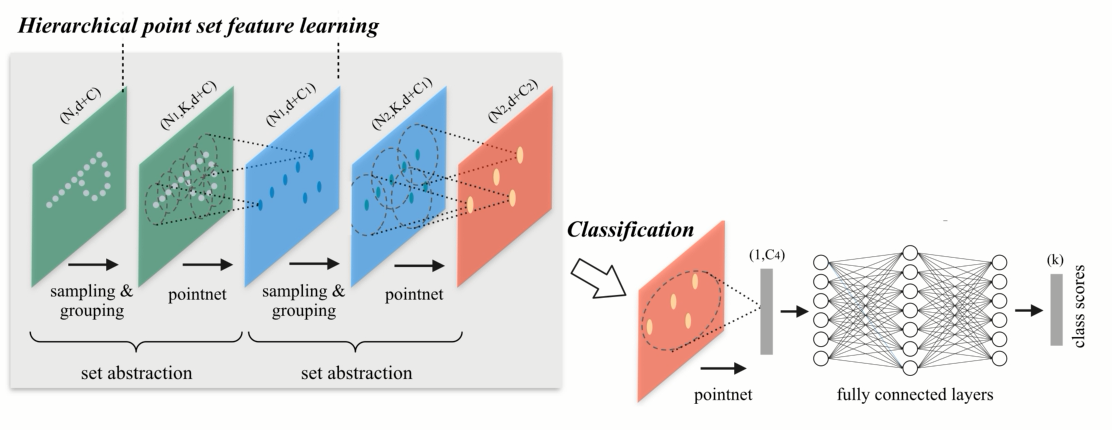
点集的简化: layer:选择小区域,提取小区域提取局部坐标系,应用point net联合而成。
我们可以重复set abstraction的过程,实现一个多级的网络,下图展示两级, 使得点的数量越来越少,但是每个点代表的区域以及感受野,越来越大,这个cnn的概念很类似,,最后把点做一个pooling 得到globle feature,用来做分类。
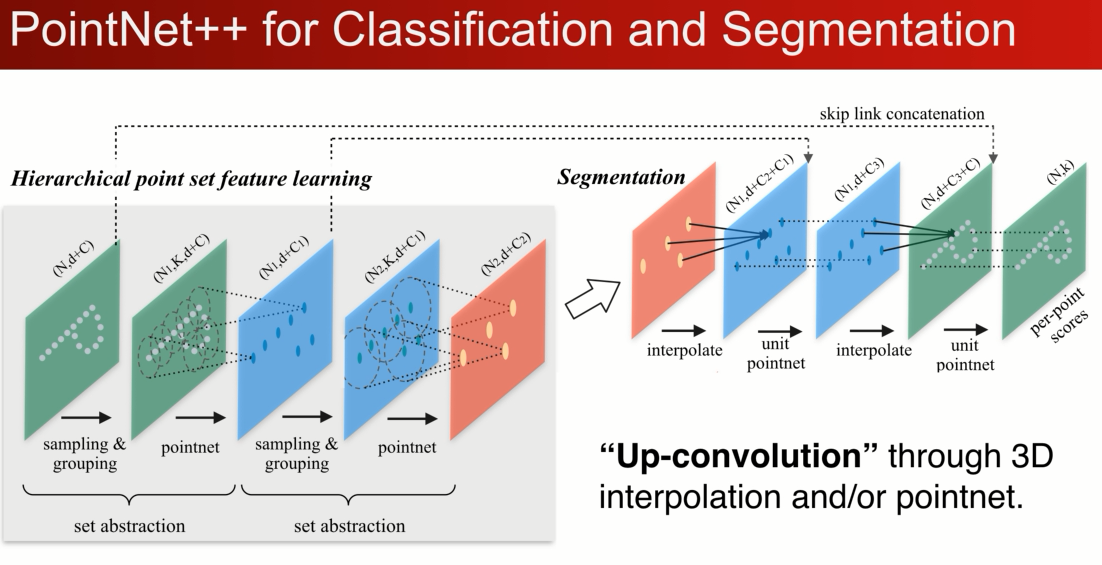
我们可以将最后的点重新上卷积的方式传回原来的点上,既可以通过3D的插值,可以通过另一种通过PN的方式回传。
在多级网络中有一个很有意思的问题,如何选择局部区域的大小,相较而言就是怎么选择卷积核的大小宽度,如果选择pointnet 作用区域的球的半径?
在卷积神经网络中大量应用小的kernal(VGG 3*3*3),在pointcloud中是否一样呢?不一定。
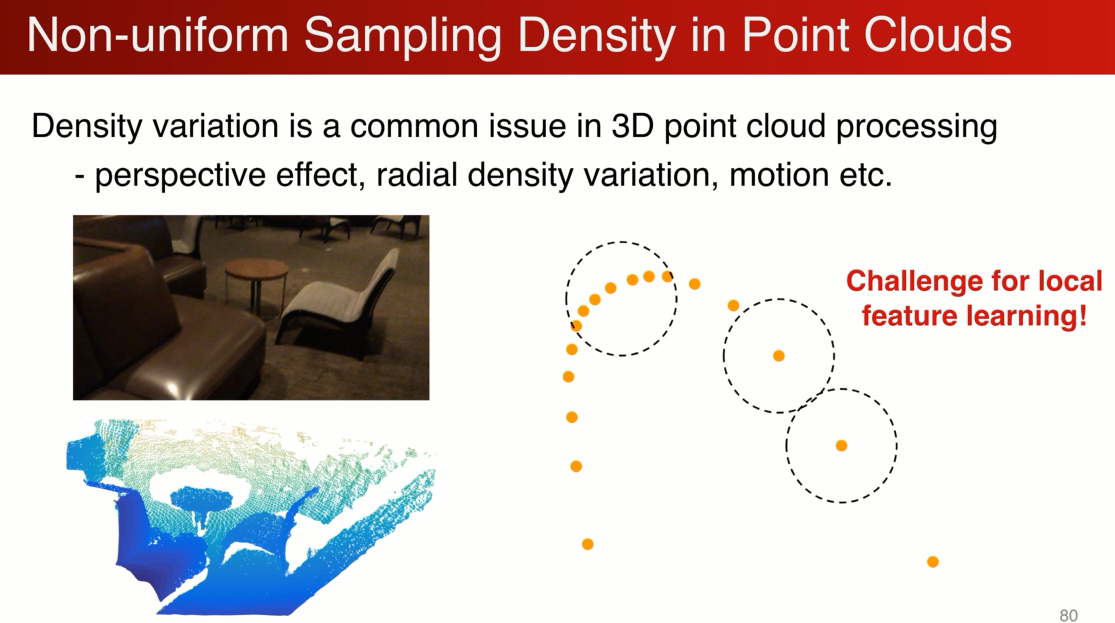
因为pointnet 常见的采样率的不均匀,比如有个depth camera 采到的图像,近的点非常密集,远的点非常稀疏,在密的地方没有问题,在稀疏的会有问题,比如极端的情况,只有一个点,这样学到的特征会非常的不稳定,我们因该避免。
为了量化这个问题,有个控制变量的实验,在1024上训练,减少点的数量相当于减少点的密度,不均匀的减少,
在刚开始1024点的时候point net ++ 更加强大,得到更高的精确度,应为它是在小区域上,随着密度的下降,性能收到了极大的影响,在小于500个点以后性能低于pointnet
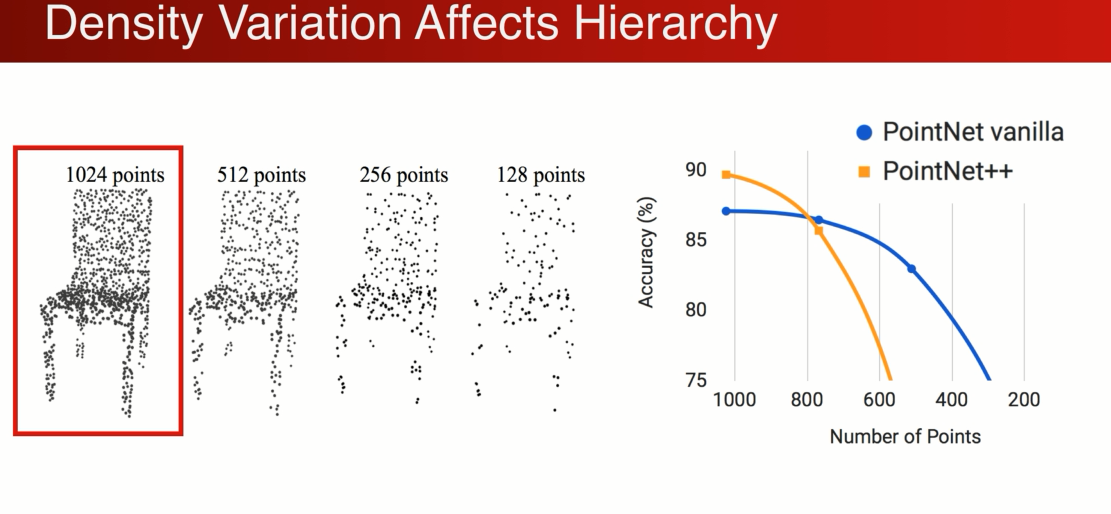

结论:在pointcloud 中 如果局部的kernel 操作太小的话,会影响性能被采样率不均匀。
针对于这个问题,我们希望设计一个神经网络来智能学习,如何综合不同区域大小的特征,得到一个鲁棒的学习层
希望在密集的地方相信这个特征,稀疏的地方不相信这个特征,而去看更大的区域。(MSG/MRG)
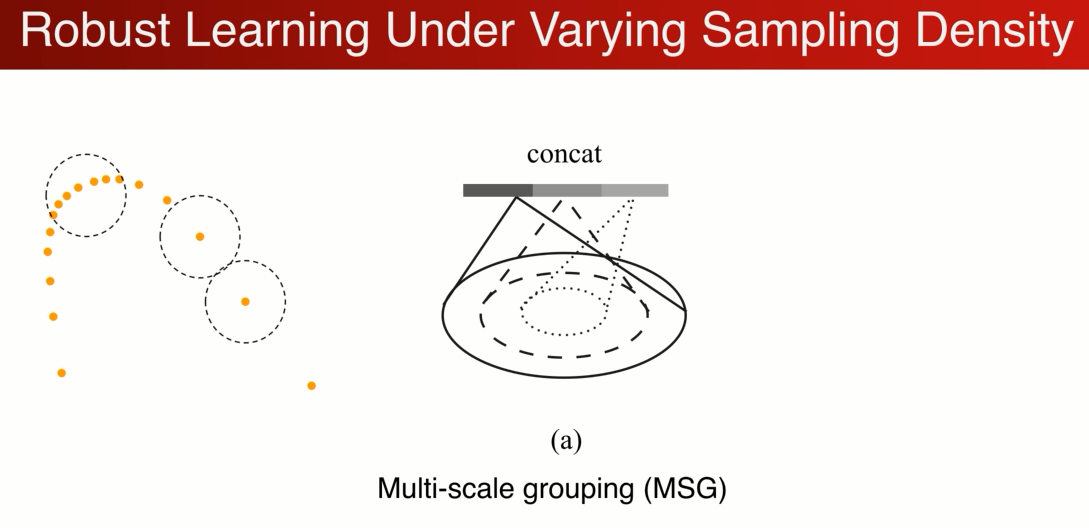

比较简单的做法是设计一个Multi-scale : 在这个2D的例子中 将不同半径的区域 ,联合在一起。有点像inception 中的结构,
但不一样的是,在训练过程中随机的对输入的dropout, 迫使网络学习若何结合不同的尺度应对损失的数据的特征。
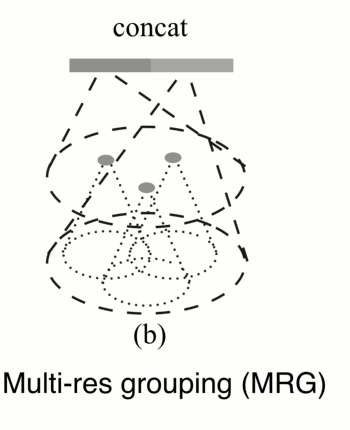
另外一种方式不是在同一级中,而是在不同网络集中综合,它有个好处,可以节省计算,在下一级的特征已经计算好了,只需要把它池化拿来用就行了。 而在mutile scale中需要对不同尺度分别计算。
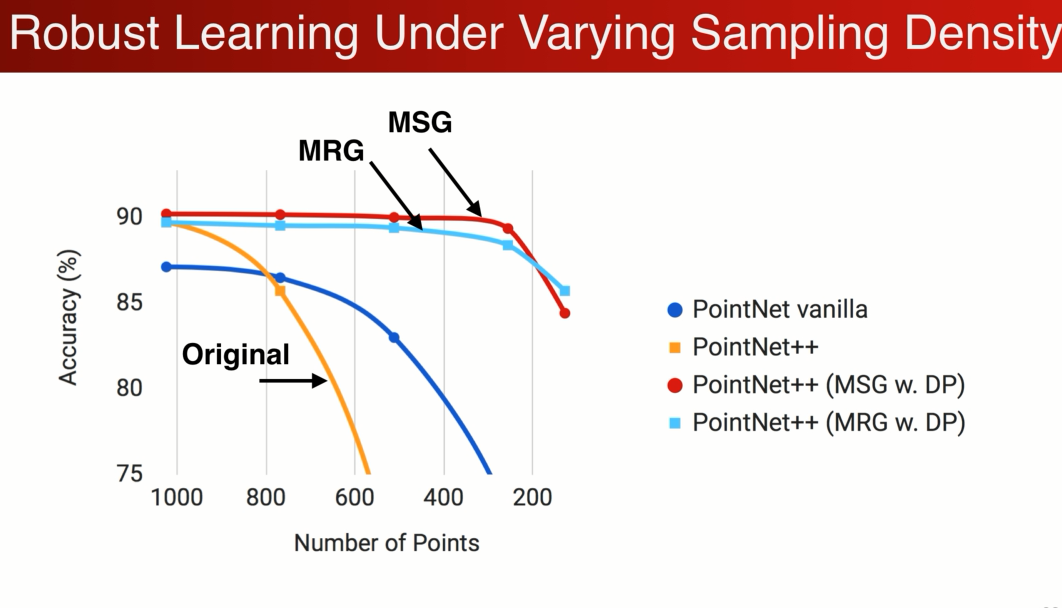
发现加了MRG和MSG中,丢失数据后鲁棒性能好很多。丢失75%的点 分类都不会受到影响。
下图是在scanenet 上对场景分割做评估:
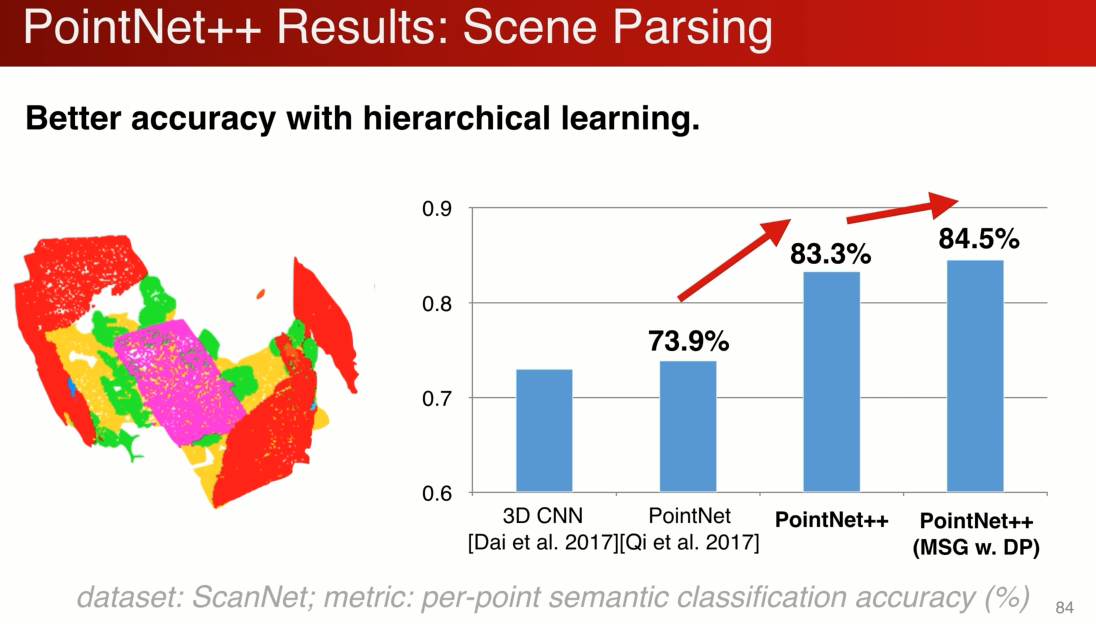
pointnet ++ 大幅提高了场景分割性能,因为多级的结构,使得他对局部的特征更好的学习,同时还有平移不变性的特点。同时多级分割稍稍提升了性能。
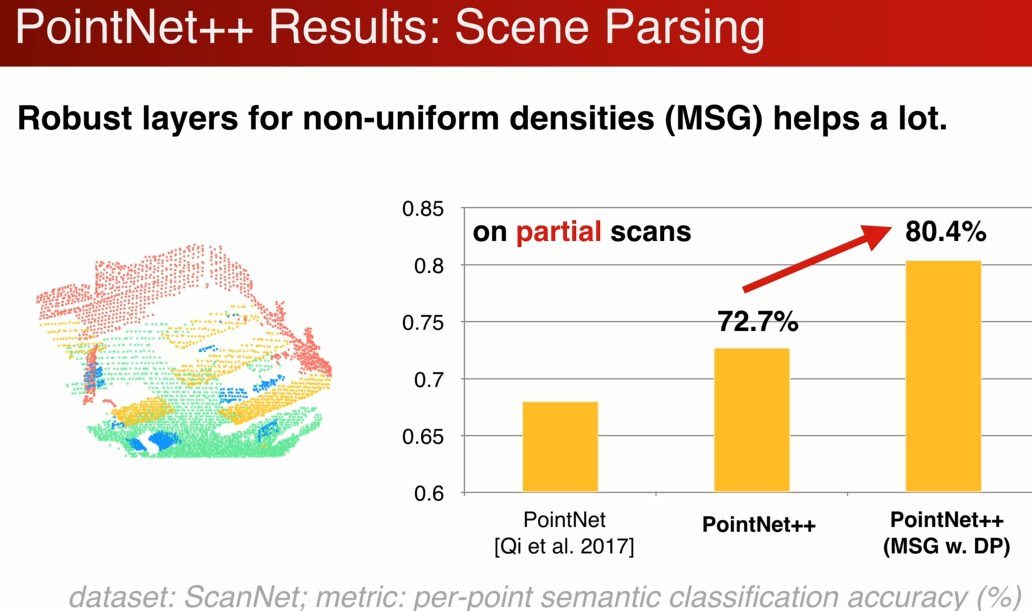
如果是局部点云的分割:单个角度,局部点云,多级结构对采样率更鲁棒的MSG大幅提升了partial scan的性能。
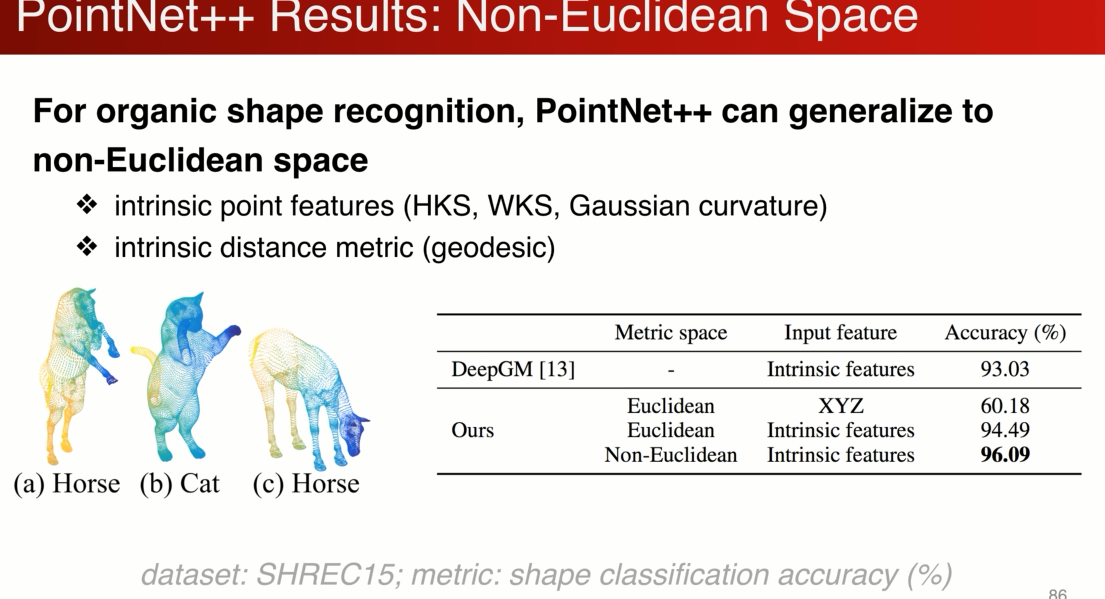
另一个POINT ++非常好的性能是 不局限于2D或者3D欧式空间,可以拓展到任意的测度空间,只要有个定义好的距离函数,下面展示对可变性物体,有机物提分割的数据集
比如分类:AB 属于几何外形相似,但是属于不同的类别,AC反之。
不是想依靠XYZ,想依靠物体表面形状的变化。
上面网络结构、设计原理
----------------------------------------------------------------------------------------------------------------------------------------------
PN在三维场景理解中的应用:
点云支持我们探索全新的解决方案,基于3D数据的解决方案
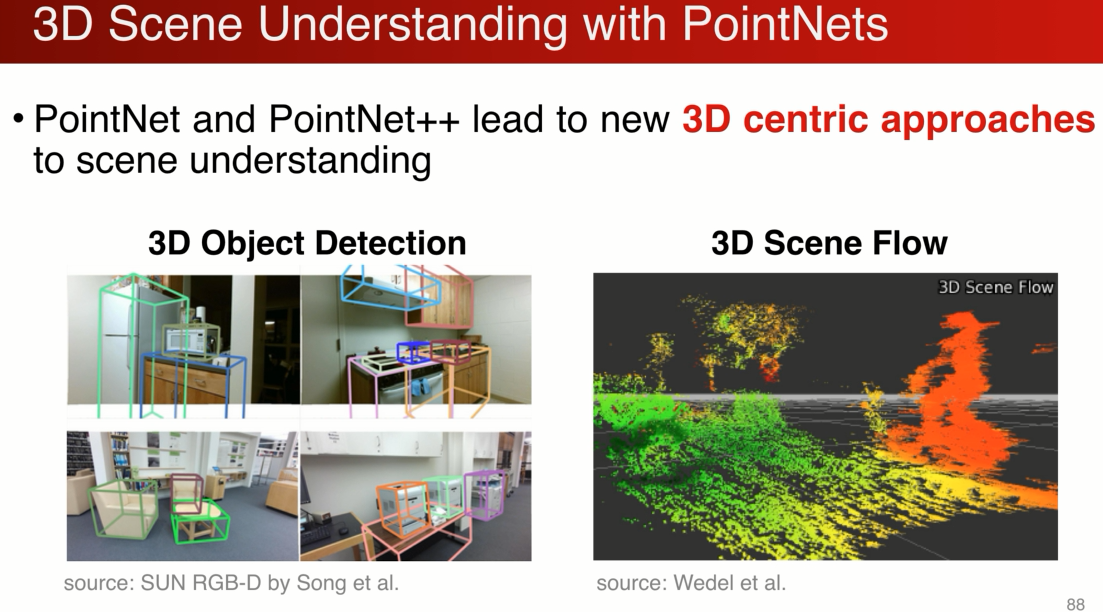
侧重前者,3D场流估计可以跳过,
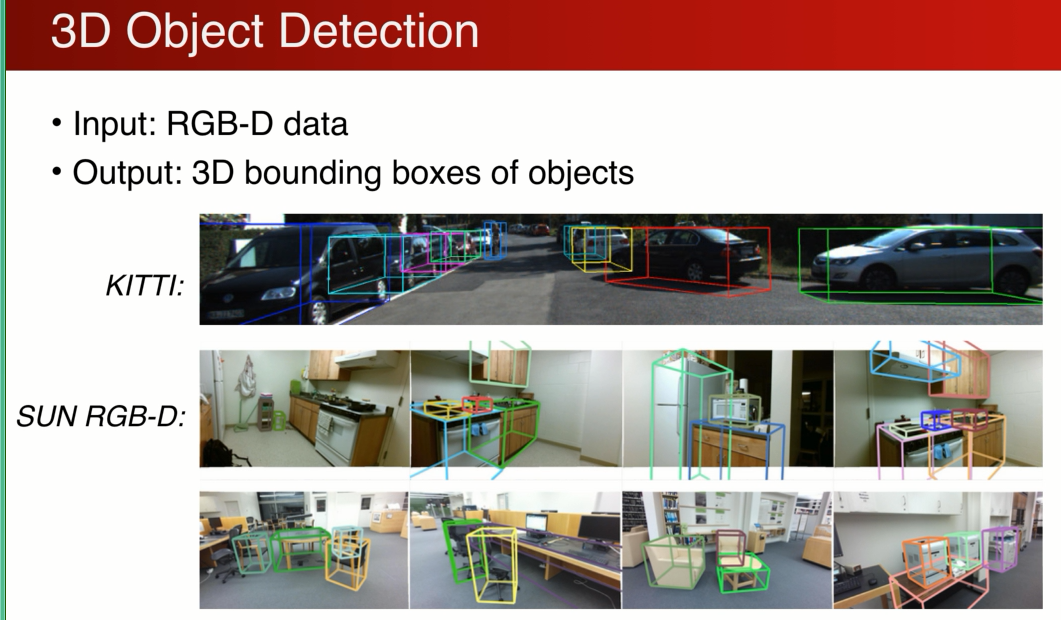
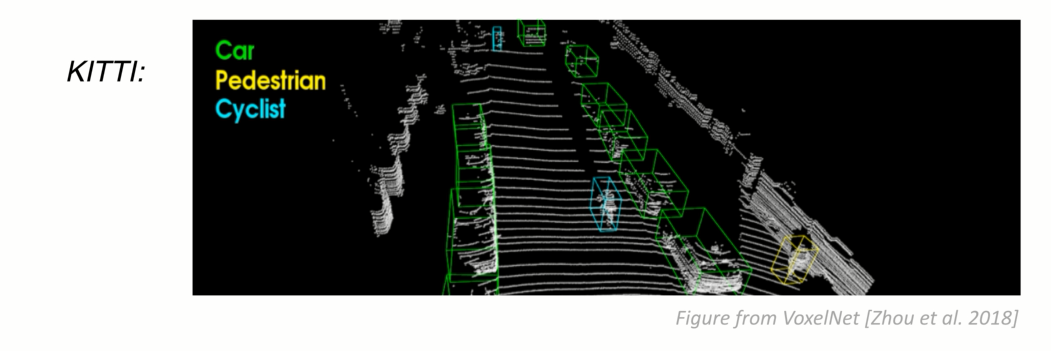
上面是在图片中的表达
下面是在点云中可视化的例子
之前的工作是怎么处理三维物体的呢?
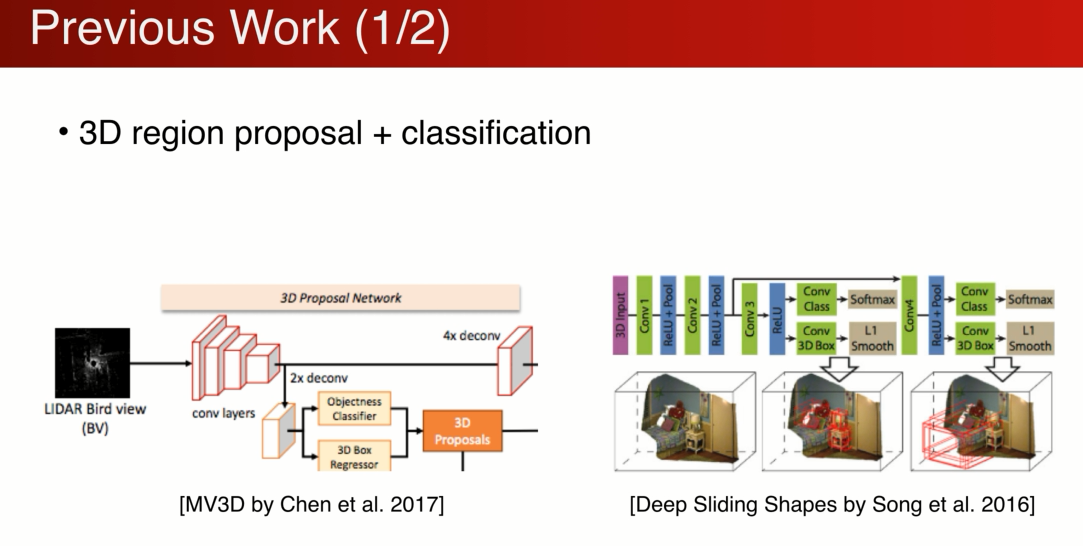
很大一套工作是基于,
1、先在三维空间中做region proposal
基于点云投影到图片上(鸟瞰图),在图片中proposal 三维的box
也可以是3D的cnn来做,
2、propos完之 后可以把2D和3D的feature 结合到proposal中,做一个分类。
缺点是:三维搜索空间非常大,计算量也非常大
而且在3D中proposal 点云的分辨率非常有限,很多时候很难发现比较小的物体。

另外一套思路是基于图片的,我想通过RGB的图片估计3D的box,依赖于对物体大小的先验知识,很难精确的估计物体的大小和位置。
另外也可以基于depth image。对其领域的定义有很多局限,比如两个点在空间中距离很远,但是投影之后的距离会非常近。
所以在图片的表达形式下,2D的cnn收到了很大的局限。很难精确的估计物体的深度和大小
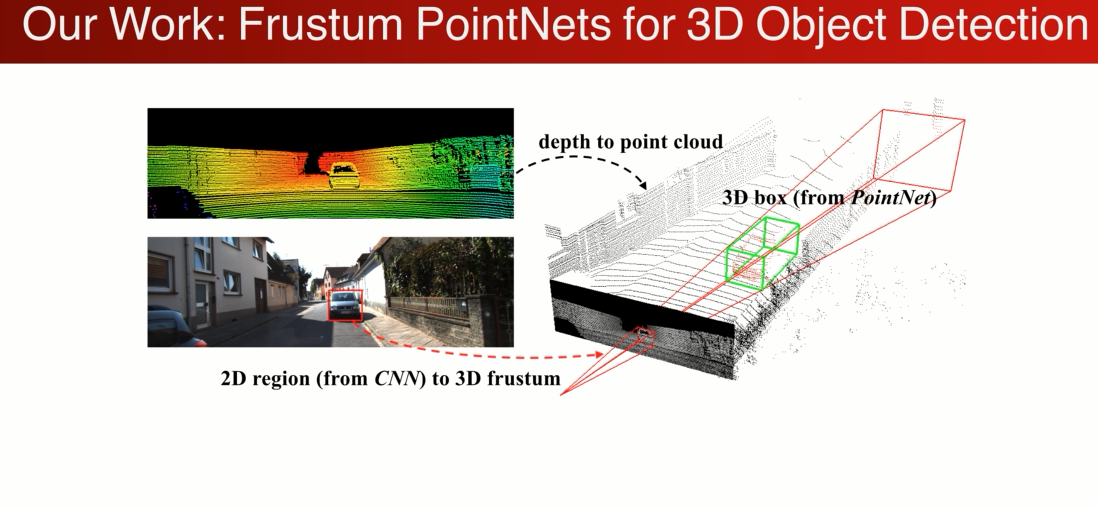
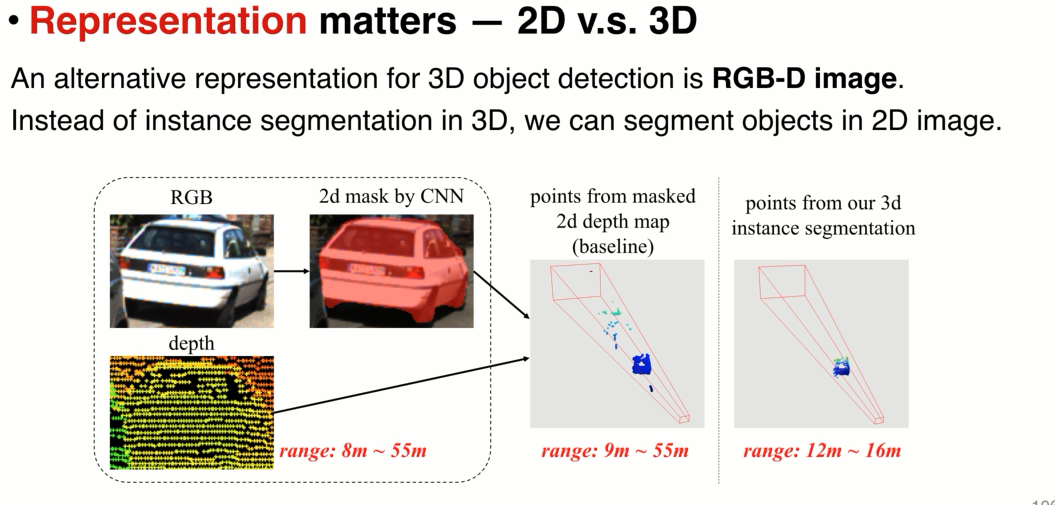
我们的设计思路 希望结合2D和3D的优点,针对与RGB-D 的输入
先在RGB图片上用一个2Ddector 得到一个2D的检测框,因为我们知道camera intrases(投影角度,投影点),我们可以有2D的区域(逆投影)生成一个3D的视锥frustum
接下来对物体的搜索就可以在视锥内进行搜索,我们可以将其转化成在3D点云中搜索的问题
好处有了两个:
1、利用2D的detector 来缩小搜索的范围,本来需要在整个3D空间中,因为有2Ddector的帮忙,可以在视锥的范围内搜索,大幅减少了搜索的计算量和复杂度
2、在视锥内可以针对于点云做操作,利用点云几何的精确性。利用3D,deeplearning 的工具(pointnet)直接处理点云的数据,得到非常精确的3DBB。


基于视锥的3D物体检测,有两个挑战:
1、前景的遮挡和后景的干扰,基于层级的方法在这都会败下阵来
2、点的范围很大,很难用3D cnn 网格化栅格化。
解决方案用pointnets来解决这个问题,(基于3D点云数据的方法):

1、利用一个2Ddection 将物体检测出来,根据照相机的投影角度参数,可以把2D box 变换到 3d 视锥的范围,在视锥内搜索车在哪里(Frustum Proposal )
2、理论上可以直接在视锥内找3D的BOX,但是由于前景的干扰和后景的干扰,希望把关键点拿出来,不要受到干扰点的影响,所以后面会接一个3D pointnet的分割网络。
3、分割出来以后呢,再用一个精确的网络估计物体的3D bb,位置,大小 ,姿态
result:

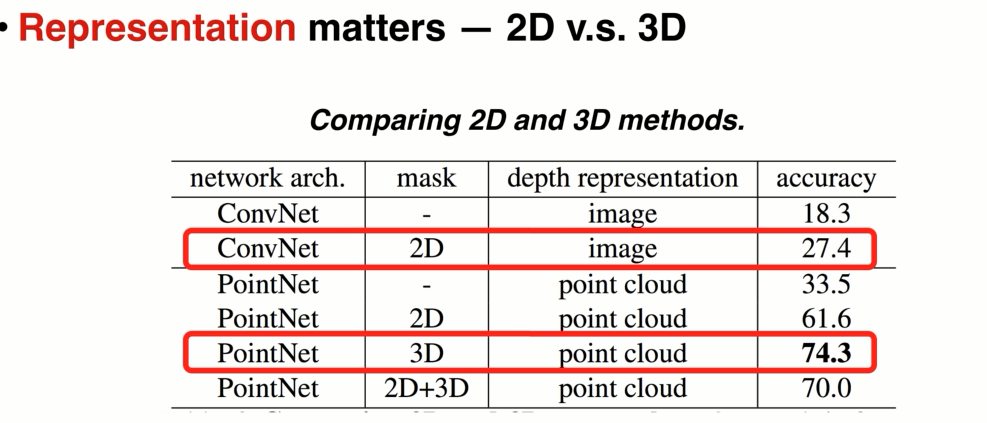
在汽车 小物体(行人 自行车)优势更大。因为2D的分辨率很高,小物体有优势
为什么有这么优异的结果呢?
有两方面原因:
1 , 2D的分辨率非常高,比较容易把2D区域propasal出来。
2 选择了3D 分割方法,相比mask-rcn 。将2d mask的depth point 拿出来发现分割效果非常差,原因是:在图片中很近,但是在3d中很远的
3 对输入做归一化,因为对点云的归一化,可以简化学习问题:
比如:

a:俯视图,汽车的位置视锥的范围x 很大
b:归一化之后,可以旋转坐标系,旋转z轴,把z指向视锥的中心方向,简化了x的分布和学习问题
c:进一步,在深度上,z上有很大的分布,我们基于3D物体分割可以找到分割后的中心,物体的点集中在原点附近,进一步简化
d:可以通过一个网络,去估计物体真实的中心,分割和物体中心可能不一样,在最后绿色坐标系进行bb估计
因为是点云数据,所以归一化操作比较方便。矩阵乘法就可以
V3 亦可以检测,V4 非常远的点。
室内场景
加速100 1k效果加速
总结:
两个网络,对输入顺序的置换不变性,轻量级的结构,对数据的丢失非常鲁棒,提供了一个统一的框架为不同的任务服务。具体在3d场景理解中,3d物体识别的应用
AI不仅仅在场景理解中有用,产品设计,图片集合中 图片之间的关系
FAQ:
1 PN没考虑点之间的关系,在PN ++ 中有考虑
2 数据集,部件分割shapenet part 场景 s-3d-s scan-net
3 如果仅仅使用雷达,做3D物体检测,有没有可能进行拓展?
简单的拓展是在雷达中进行propal , 就不是一个视锥的propal了
把雷达投影到地面变成一个鸟瞰图,在里面进行区域的pp,在pp里在用Pointnet 估计3DBBx,这还是基于投影的方法。
能否直接在3D中做PP呢?
苹果voxelnet 利用了pointnet 和3D cnn 直接在雷达数据中进行PP 和 dection
4 点的数量的评价?
输入点数量是可变吗?训练的时候是固定的,测试时候是可变的。
如果是单个图片的话,是可变的。多个其实也是可以的。只需要强行pad到一样的数目即可
5 未来发展趋势?
2D和3D结合,传感器的分辨率不高,3D几何信息丰富,更好的结合
6 激光雷达 近密远疏 ,该怎么处理呢?
pointnet ++ 中有些结构 能处理这些不均匀采样率的问题,进一步 可以加W 来调节点云的分布
github 上都有数据集下载 可以 Frustum pointnet
7 pointnet ++ 如何用到实例分割
其实frustum pointnet 就是一种实例分割,实例分割在3D中是一个先做的问题,先有实例分割,后又物体检测
8 pointnet ++ 因为需要对局部特征做处理对GPU有要求
可以解决,可以专门写cuda layer 减少gpu的使用率。
1024 batch32 6G内存
9 frustum point 2d检测是gt还是检测结果:
gt ,进行了扰动,2个好处: 1、简单 2、可以和 2 d dector 有个分离,可以随时换2d dector,而不用重新训练后面的网络。
9 测试注意?
测试方向旋转 然后平均,数据增强,随机drop 一些点,鲁棒性更好。
10 有没有可能直接用PN++ 直接对点云数据做检测?
正在研究,voxelnet 也是解决类似的问题
11 volnet 只对点云数据训练做到kitti第一?
只在车上,因为车相对比较大,只用点云应该够用,行人和自行车比较困难
12 法向量的作用?
如果仔细看的话,物体基于Mutil-view还是最领先的,分辨率高,键盘的建, 但是在点云上看和平板没区别。 在mesh上提取的法向量,就能把平板和键盘区别开
13 猫和马非欧空间是怎么处理的?
先算测地距离,降为到3d,用3d的欧式距离模拟测地距离
14 Tnet 可以用姿态gt 监督其训练
15 point ++ 结果不太问题,modelnet data size限制的,split test,鼓励在test 时进行多次旋转以后平均结果。
16 人脸点云很有潜力
17 3D行人检测有意义吗?
图片暗的时候,可以预防交通事故
18 pointnet ++ 中 release 版本没有+T-net
在model-net分类上Tnet帮助不大,因为PN++ 已经学了局部特征,局部特征其实对旋转不太敏感,已经可以取得比较好效果
19 PN++ 有对局部点云变换的不变性吗?
局部加T-net 是不太合理的,并不能保证不同局部的变换是统一的,如果需要实现统一,capsil(?) net
20 法国数据集是室外的。 可以试试metapoint3D的数据集
21 RGB 相对于点云是锦上添花的
22 为什么用FPS降采样?希望达到一个均匀采样的效果,尽可能采远处的点,也可以随机的采样
23 point++ 提供了多卡的
24 frustum 在2d检测不准的时候影响截断最终的结果吗?
会,但是有能力复原。但是2d的部分非常不好,会限制3D部分
25 GCNN 和 pointnet ++ 有很多相通的地方,在点云上的应用?
都是在3D空间中寻找局部,然后再局部定义某种操作,形成多级的网络架构
pointnet ++ 不仅适用于2d和3d ,还适用于非常高维的空间
点云深度学习的3D场景理解的更多相关文章
- 2020国防科大综述:3D点云深度学习——综述(3D点云分割部分)
目录 摘要 1.引言: 2.背景 2.1 数据集 2.2评价指标 3.3D点云分割 3.1 3D语义分割 3.1.1 基于投影的方法 多视图表示 球形表示 3.1.2 基于离散的方法 稠密离散表示 稀 ...
- 2020厦门大学综述翻译:3D点云深度学习(Remote Sensiong期刊)
目录 摘要 1.引言: 2.点云深度学习的挑战 3.基于结构化网格的学习 3.1 基于体素 3.2 基于多视图 3.3 高维晶格 4.直接在点云上进行的深度学习 4.1 PointNet 4.2 局部 ...
- 2020国防科大综述:3D点云深度学习—综述(点云形状识别部分)
目录 摘要 1.引言: 2.背景 2.1 数据集 2.2评价指标 3.3D形状分类 3.1基于多视图的方法 3.2基于体素的方法 3.3基于点的方法 3.3.1 点对多层感知机方法 3.3.2基于卷积 ...
- WebGL学习(2) - 3D场景
原文地址:WebGL学习(2) - 3D场景 经过前面WebGL学习(1) - 三角形的学习,我们已经掌握了webGL的基础知识,也已经能够画出最基本的图形,比如点,线,三角形,矩形等.有了2D绘图的 ...
- 深度学习-Wasserstein GAN论文理解笔记
GAN存在问题 训练困难,G和D多次尝试没有稳定性,Loss无法知道能否优化,生成样本单一,改进方案靠暴力尝试 WGAN GAN的Loss函数选择不合适,使模型容易面临梯度消失,梯度不稳定,优化目标不 ...
- 深度学习中Embedding的理解
这学期为数不多的精读论文中基本上都涉及到了Embedding这个概念,下面结合自己的理解和查阅的资料对这个概念进行一下梳理. ===================================== ...
- 深度学习-DCGAN论文的理解笔记
训练方法DCGAN 的训练方法跟GAN 是一样的,分为以下三步: (1)for k steps:训练D 让式子[logD(x) + log(1 - D(G(z)) (G keeps still)]的值 ...
- ML平台_小米深度学习平台的架构与实践
(转载:http://www.36dsj.com/archives/85383)机器学习与人工智能,相信大家已经耳熟能详,随着大规模标记数据的积累.神经网络算法的成熟以及高性能通用GPU的推广,深度学 ...
- 点云上的深度学习及其在三维场景理解中的应用(PPT内容整理PointNet)
这篇博客主要是整理了PointNet提出者祁芮中台介绍PointNet.PointNet++.Frustum PointNets的PPT内容,内容包括如何将点云进行深度学习,如何设计新型的网络架构 ...
随机推荐
- Potyczki Algorythmiczne 2019
Runda próbna: A + B 设$f[i]$表示两数相加得到前$i$位的方案数,由$f[i-1]$和$f[i-2]$转移得到. #include<cstdio> #include ...
- 58同城笔试题:数组去重;分饼干(分糖果);最小路径和(leetcode64)
1. 数组去重 题目描述 /** * 有序数组去重 * 输出最终的数字个数 * 输入:1,2,2 * 输出:2 * @author Turing * */ 代码 import java.util.*; ...
- [NewLife.XCode]导入导出(实体对象百变魔君)
NewLife.XCode是一个有10多年历史的开源数据中间件,支持nfx/netcore,由新生命团队(2002~2019)开发完成并维护至今,以下简称XCode. 整个系列教程会大量结合示例代码和 ...
- Python连载18-closure闭包解释及其注意点
一.闭包 1.定义:当一个函数在内部定义函数,并且内部的函数应用外部函数的参数或者局部变量,当内部函数被当做返回值的时候,相关参数和变量保存在返回的函数之中,这种结果,叫做闭包. 2.例子:连载17中 ...
- CocoaPods 升级1.8.4的坑 CDN: trunk Repo update failed
之前升级了cocoaPods 版本1.8.4,今天pod install,然后问题就来了: 1.出现了下边的问题: Adding spec repo `trunk` with CDN `https:/ ...
- Go 程序编译成 DLL 供 C# 调用。
Go 程序编译成 DLL 供 C# 调用. C# 结合 Golang 开发 1. 实现方式与语法形式 基本方式:将 Go 程序编译成 DLL 供 C# 调用. 1.1 Go代码 注意:代码中 ex ...
- axios 源码分析(上) 使用方法
axios是一个基于Promise 用于浏览器和 nodejs 的 HTTP 客户端,它可以在浏览器和node环境下运行,在github上已经有六七万个星了,axios使用很方便,很多人在使用他,vu ...
- A query was run and no Result Maps were found for the Mapped Statement
mybatis测试方法报错: org.mybatis.spring.MyBatisSystemException: nested exception is org.apache.ibatis.exec ...
- SimdJsonSharp:每秒解析千兆字节的JSON
SimdJsonSharp: Parsing gigabytes of JSON per second C# version of lemire/simdjson (by Daniel Lemire ...
- 【redis】redis异常-MISCONF Redis is configured to save RDB snapshots
使用redis报错: MISCONF Redis is configured to save RDB snapshots, but it is currently not able to persis ...