长距离单历元非差GNSS网络RTK理论与方法总结(未完)
2018-11-04
1.状态空间:
5.层析模型
电离层层析,见新买的书《基于GNSS的电离层层析算法及其应用》
6.第一章总结
1.1 网络RTK优缺点和PPP优缺点:
网络RTK优点包括:定位精度高,收敛快,参数少,模型简单固定;缺点:精度与作业距离相关,流动站位置变化可能需要变化主参考站,CORS网同一时刻误差改正数不是基于统一模型得到的(不理解),数据利用率低(四个非差观测值组成一个双差观测值,丢失一个,其他都不能使用),需要考虑参考星变换,双差观测值间的相关性给数据处理增加了难度。
PPP优点:可使用观测值多,能直接获得测站坐标,测站与测站之间无距离限制。缺点:待求参数多,无法采用差分方法消除误差影响,需要利用完善的误差改正模型,初始定位收敛时间长,需要高精度IGS产品,实时精度不如网络RTK,高程方向定位精度较差。
探讨:发挥两者各自优点,网络RTK中使用非差误差改正数,各基准站误差改正数独立。
1.2 GNSS高精度实时动态定位
单基站,15km,厘米级结果。
网络RTK,首先利用GAMIT静态定位方法获得基站精确坐标。确定各基站模糊度,建立区域误差改正模型。
PPP,利用精密卫星轨道,卫星钟差,及双频测距码和载波想我观测值。精度亚米到几个厘米。采用最小二乘只适合静态,动态使用卡尔曼滤波。无周跳时,模糊度不变,卫星钟差、接收机钟差、电离层延迟、对流层延迟随时间变化。PPP主要考虑中性大气误差和钟差参数,中性大气误差利用模型改正后,还有一部分残差无法消除,可以采用一阶高斯-马尔科夫过程、随机游走或者分段线性方法估计。PPP的周涛探测修复、野值点的剔除比双差困难。
两者技术不同:时间不同,数据利用率不同,观测模型不同,周跳探测修复的工作量不同,,网络RTK容易,PPP与测码伪距观测值得质量有关;定位参数数量不同,RTK较少,PPP多。
1.3 网络RTK算法
算法关键问题:一是基准站观测值误差,即电离层延迟误差和中性大气延迟等误差的计算,核心是基准站观测值模糊度确定问题;二是流动站观测误差的消除与定位,核心是流动站模糊度解算。
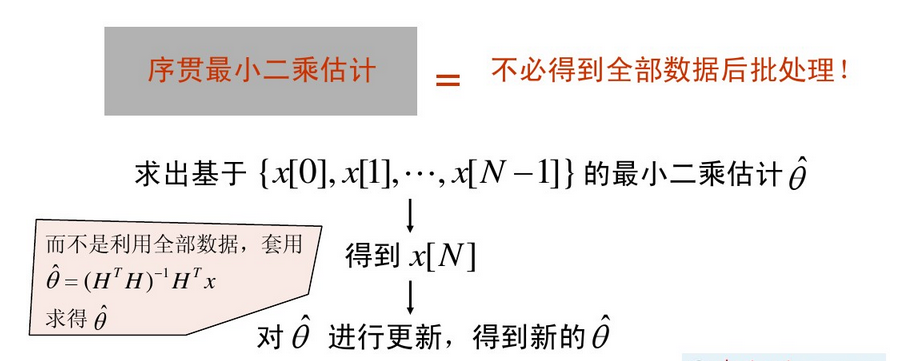
1、网络RTK基准站间双差整周模糊度确定:一般情况下,网络RTK基准站相距几十千米或上百千米,电离层延迟、对流层延迟和卫星轨道误差等误差对双差载波相位观测值的影响大于载波相位波长的一半。即使基准站坐标精确已知,确定基准站间双差整周模糊度仍然困难。Han(1997)提出先用伪距观测值确定宽巷模糊度,在确定无电离层模糊度,最后确定基础模糊度,但需要几十分钟得到宽巷模糊度,确定单个频率的基础模糊度时间更长。 sun(1999)提出序贯最小二乘平常算法,首先用序贯最小二乘平差确定宽巷整周模糊度,然后确定无电离层模糊度,最后确定基础模糊度,需要一个小时才能确定基准站模糊度。 hern(2000)自由电子任务随机游走,实时估计电离层层析模型,改正观测值,确定基准站模糊度过程也是首先确定宽巷模糊度然后固定L1、L2双差整周模糊度。 高星伟(2002)提出基准站间基线单历元模糊度搜索算法,主要思想为不解算方程组,直接利用基准站坐标已知、模糊度为整数、双频整周模糊度之间线性关系,对双差模糊度搜索;能够克服单历元下,基准站间整周模糊度解算的未知数个数多余方程个数、方程组秩亏,无法解算的问题。(网络RTK基准站间基线单历元模糊度搜索方法 2002)。
网络RTK基准站间基线单历元模糊度搜索方法-高星伟 2002
【
主要讨论基准站的综合误差计算,基准站的模糊度确定问题。基准站已知情况下,距离比较长,电离层、对流层的影响比较大。常用方法为:双频载波数据进行宽、窄波和无电离层组合,然后分别确定基础模糊度。无论组合顺序如何,这些方法都比较繁琐,在组合时会增加观测早上,需要长时间观测。作者提出双频单历元长距离基准站模糊度搜索方法,主要思想为不解算方程组,直接利用基准站坐标已知、模糊度为整数、双频数据之间关系这三个条件进行搜索。首先有L1、L2的双差观测方程,双差观测方程中仍有双差整周模糊度、对流层延迟、电离层延迟和多路径效应4个未知数。多路径效应通过扼流圈天线,不考虑。对流层延迟,由于基准站坐标已知且长期固定观测,所以温度、气压等气象参数可以测定,使用对流层改正模型计算双差对流层延迟大小。确定模糊度的公式之一: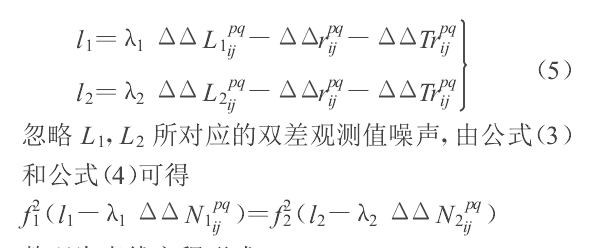
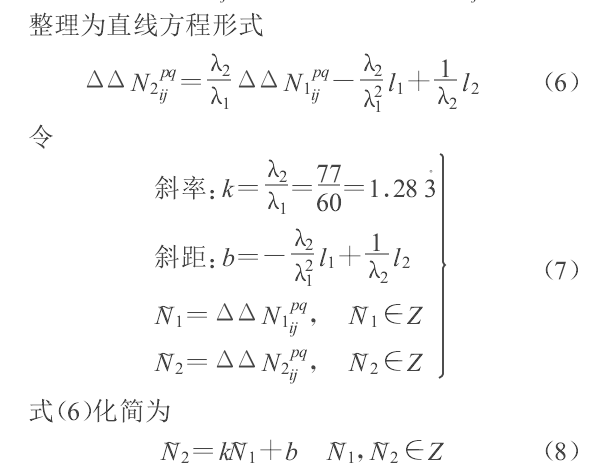
实际应用中,由于剩余残差的影响和相位测量精度的限制,完全符合方程(8)的L1和L2整周模糊度的候选值是找不到的。对流层延迟的计算精度越高,其残余误差消除的越好,在一定范围内,整周模糊度的候选值个数越少,后面的模糊度确定就越容易。
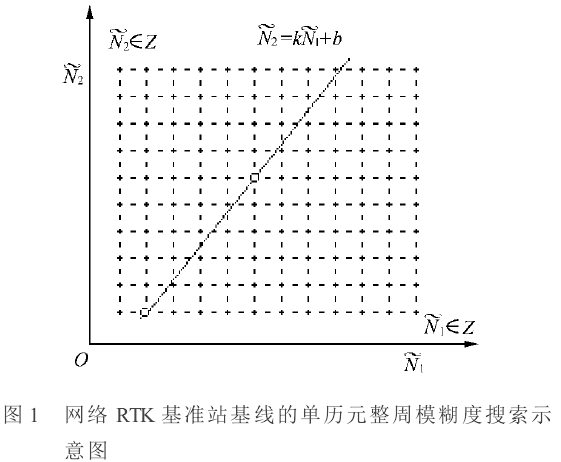
在理论上,该方法不存在模糊度的确定问题,因为对于L1载波来说,整周模糊度候选值的重复周期为60,即在模糊度初值的左右30周范围内只有一个整周模糊度候选值,该初值与所求整周模糊度之差就是双差电离层延迟,又因为双差电离层延迟不可能达到30周,则该整周模糊度候选值即为所求整周模糊度。
但在实际应用中,由于各种误差的计算或消除的精度有限,是不可能得到上述理想结果的。在这种情况下,有3种方法:1 假设法,短基线情况下,电离层对L1的双差延迟小于3.5周。2 伪距P码法:用前面步骤计算的双差对流层延迟改正双差P码伪距,减去测站与卫星间距离,得到双差电离层延迟,与该延迟最接近的所对应的整周模糊度候选值即为所求。3 回代法,选出少数模糊度候选值回代到双差观测方程,作为已知值,进行无电离层组合,算出频率无关的误差(主要是对流层延迟),取与使用对流层模型计算的结果最接近的一组整周模糊度。
数据分析:三个站,短基线。选出一颗卫星为例,按照公式5计算出各历元l1,l2的大小(包含了整周模糊度和电离层,这时单位为周),选出一条基线模糊度候选值,假设双差电离层延迟小于10周(通常情况下远小于10周),分别计算出候选值所对应的双差电离层延迟,以及化为同一频率后的差值(重要),差值理论上为0,并且选择模糊度候选值(无论是哪个),这一项都会很小,否则候选值是错误的。
】
长距离单历元非差GNSS网络RTK理论与方法总结(未完)的更多相关文章
- Python之☞网络编程中一些概念问题(未完)
:::一些名词的解释::: 网络: 网络是辅助双方能够连接在一起的工具,使用网络的目的,为了联通多方然后进行通讯,能够让软件在不同的电脑上运行,相互传输数据. 网络协议: 约定俗成的,没有理由. TC ...
- [WEB安全]给BurpSuite设置非本地的网络代理
目录 0x01 一般情况 0x02 移动端流量抓取 0x03 多重代理的情形 0x04 参考链接 在Web渗透测试过程中,BurpSuite是不可或缺的神器之一. BurpSuite的核心是代理Pro ...
- android网络请求库volley方法详解
使用volley进行网络请求:需先将volley包导入androidstudio中 File下的Project Structrue,点加号导包 volley网络请求步骤: 1. 创建请求队列 ...
- 安装PHP过程中,make步骤报错:(集合网络上各种解决方法)
安装PHP过程中,make步骤报错:(集合网络上各种解决方法) (1)-liconv -o sapi/fpm/php-fpm /usr/bin/ld: cannot find -liconv coll ...
- [SignalR]在非Hub继承类中使用脚本方法
原文:[SignalR]在非Hub继承类中使用脚本方法 新建一个普通类OutHub,里面包含一个脚本方法OutHubTest. 因为大家知道,若能让脚本调用到的话,必须继承Hub,那怎么实现了?通过G ...
- 网络协议理论,http协议,数据结构,常用返回码
一.网络协议理论 先是DNS协议 将域名转化成IP地址 这个你要知道 域名只是人记着方便 计算机记的是IP 然后是TCPIP协议 数据在传输过程中可能要经过陆游器 涉及到的是ARP协议 将IP地址转换 ...
- win7自带wifi win7无线网络共享设置图文方法
win7自带wifi win7无线网络共享设置图文方法 点评:开启windows 7的隐藏功能:虚拟WiFi和SoftAP(即虚拟无线AP),就可以让电脑变成无线路由器,实现共享上网,节省网费和路由器 ...
- LwIP协议栈开发嵌入式网络的三种方法分析
LwIP协议栈开发嵌入式网络的三种方法分析 摘要 轻量级的TCP/IP协议栈LwIP,提供了三种应用程序设计方法,且很容易被移植到多任务的操作系统中.本文结合μC/OS-II这一实时操作系统,以 ...
- PHP几种抓取网络数据的常见方法
//本小节的名称为 fsockopen,curl与file_get_contents,具体是探讨这三种方式进行网络数据输入输出的一些汇总.关于 fsockopen 前面已经谈了不少,下面开始转入其它. ...
随机推荐
- RabbitMQ上手记录–part 2 - 安装RabbitMQ
上一篇<<RabbitMQ 上手记录-part 1>>介绍了一些基础知识,整理了一些基础概念.接下来整理一些安装步骤和遇到的问题. 我在CentOS7和Ubuntu16.4上都 ...
- session中用户信息改变问题
问题描述: 在web项目中,我们经常将用户登录信息放在session中用来做后续的权限判断等操作,但最近在项目中发现一个奇怪的现象,session中的用户信息和登录时的信息有了差异. 原因: 在后台代 ...
- mybatis 小结
1. 根据后台list 在SQL中使用到In的时候 <if test="sbidList != null and sbidList.size() > 0"> A ...
- vps服务器搭建——Linode VPS 20美元优惠获取教程
转载:http://www.cuishifeng.cn/linode/index.html?v=2 声明:本文旨在教大家怎么获得linode 20美元优惠,并免费使用4个月vps,请低调薅羊毛!(多张 ...
- JS中的事件冒泡——总结
一. 有话要说 事件冒泡这个话题已经被园子里的朋友说透了,已经没什么要讲的了,但是由于呢我这边有个小问题刚好跟这个事件冒泡有关,就突然性想写个总结:一方面是给自己增加印象,另一方面给园子的新手们,提供 ...
- 三:vim常用快捷键
窗口移动操作: j或者Ctrl+e(就是Ctrl+e):向下细微滚动窗口. k或者Ctrl+y:向上细微滚动窗口. h:向左细微滚动窗口. l:向右细微滚动窗口. gg:跳转到页面的顶部. G(就是s ...
- 算法:QQ等级换算成皇冠太阳星星月亮
/// <summary> /// 等级换算成图标分布 /// 以QQ的形式计算 /// 2^(2*0) /1 /// 2^(2*1) /4 /// 2^(2*2) /16 ...
- 【转】启动tomcat的时候一直卡在INFO: Deploying web application
在用centos7.+不熟tomcat项目的时候,启动时突然很奇怪的没报错,但是又访问不了网址,调用./shutdown.sh又结束不了,一直出现: java.net.ConnectException ...
- Spring Boot + MyBatis + Druid + Redis + Thymeleaf 整合小结
Spring Boot + MyBatis + Druid + Redis + Thymeleaf 整合小结 这两天闲着没事想利用**Spring Boot**加上阿里的开源数据连接池**Druid* ...
- 如何优雅的爬取 gzip 格式的页面并保存在本地(java实现)
1. 引言 在爬取汽车销量数据时需要爬取 html 保存在本地后再做分析,由于一些页面的 gzip 编码格式, 获取后要先解压缩,否则看到的是一片乱码.在网络上仔细搜索了下,终于在这里找到了一个优雅的 ...