机器学习进阶-目标跟踪-KCF目标跟踪方法 1.cv2.multiTracker_create(构造选框集合) 2. cv2.TrackerKCF_create(获得KCF追踪器) 3. cv2.resize(变化图像大小) 4.cv2.selectROI(在图像上框出选框)
1. tracker = cv2.multiTracker_create() 获得追踪的初始化结果
2.cv2.TrackerKCF_create() 获得KCF追踪器
3.cv2.resize(frame, (w, h), cv2.INTER_AEAR) # 进行图像大小的重新变化
参数说明:frame表示输入图片,(w, h) 表示变化后的长和宽, cv2.INTER_AEAR表示插值的方法
4.cv2.selectROI(‘Frame’, frame, fromCenter=False,showCrosshair) 在图像上进行选框操作
参数说明:‘Frame'表示图片的名字,frame表示读取的图片,fromCenter表示选框的起点是否在中心位置,showCrosshair表示是否展示选框
KCF是一种鉴别式追踪方法,这类方法一般在追踪过程中训练一个目标检测器,使用目标检测器与预测下一个阶段预测位置是否是目标,然后使用新检测结果去跟新训练集而跟新目标检测其
KCF贡献
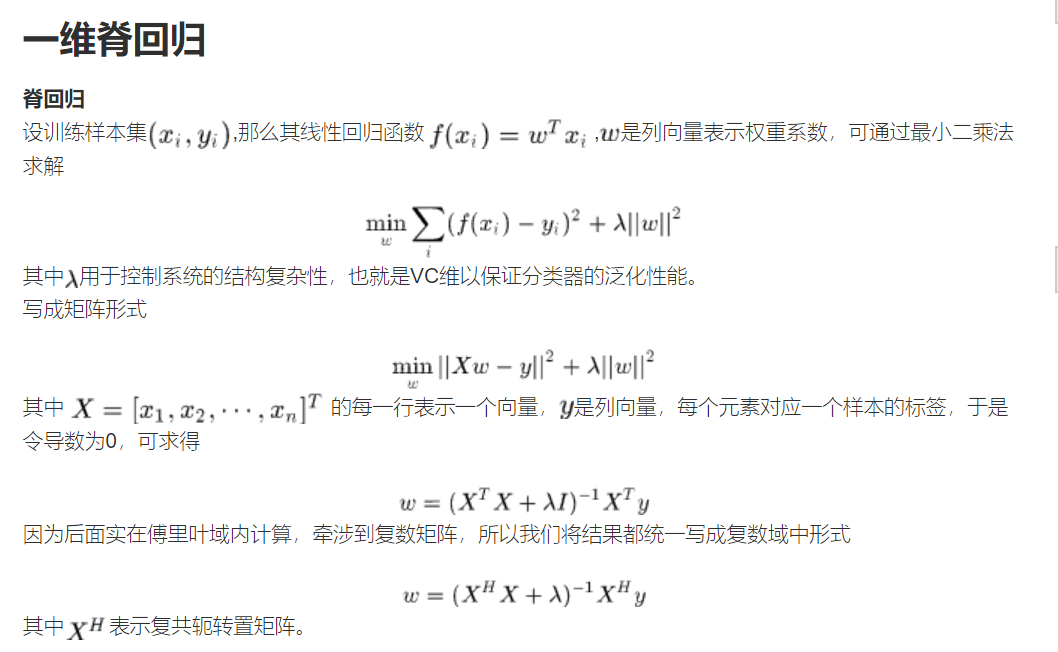
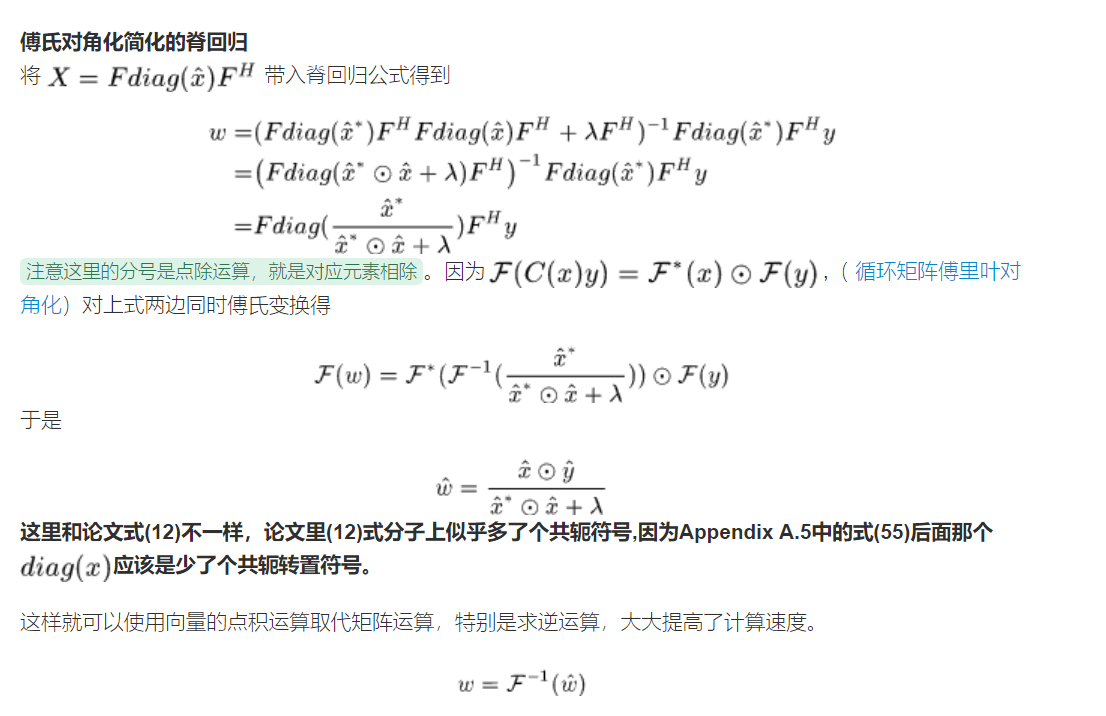
1.使用脊回归训练目标检测器,成功利用循环矩阵在傅里叶空间对角化的性质,将矩阵的运算转换为向量的Hadamad积,即元素的点乘,大大降低了运算量,提高了运算速度
1.脊回归,在原有的基础上引入了λ|w^2| 为了防止过拟合的出现,即w的分布更小且更加均匀(0, 0, 0, 1) 和 (0.25, 0.25, 0.25, 0.25), 对w进行求导,导数为0,解得w
2.循环矩阵,即训练图像都是通过目标样本的循环位移得到的, 通过PxQ进行x轴和y轴的平移变化

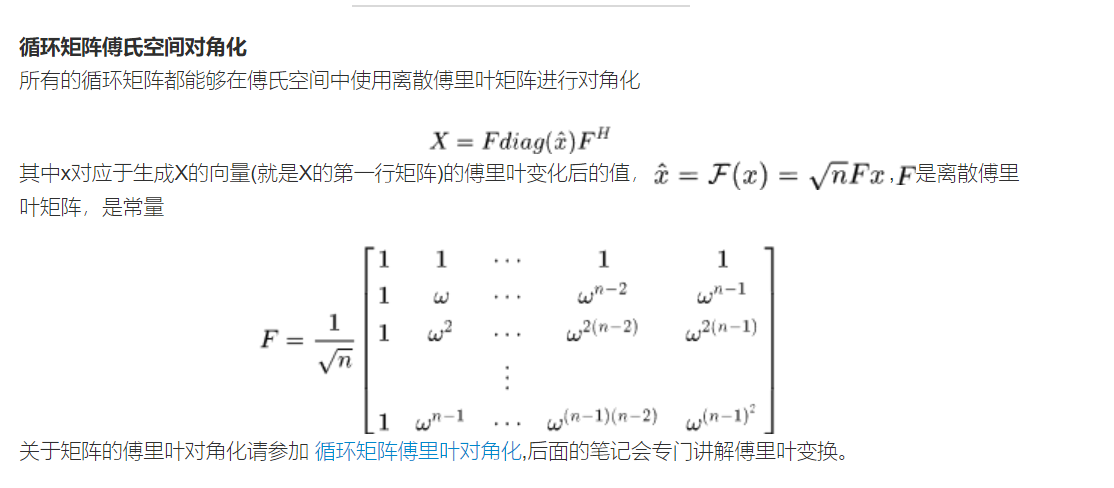
3.傅氏空间矩阵对角化, 即对上述的循环空间做一个傅里叶变化
4. 将循环矩阵x带入到脊回归进行求解
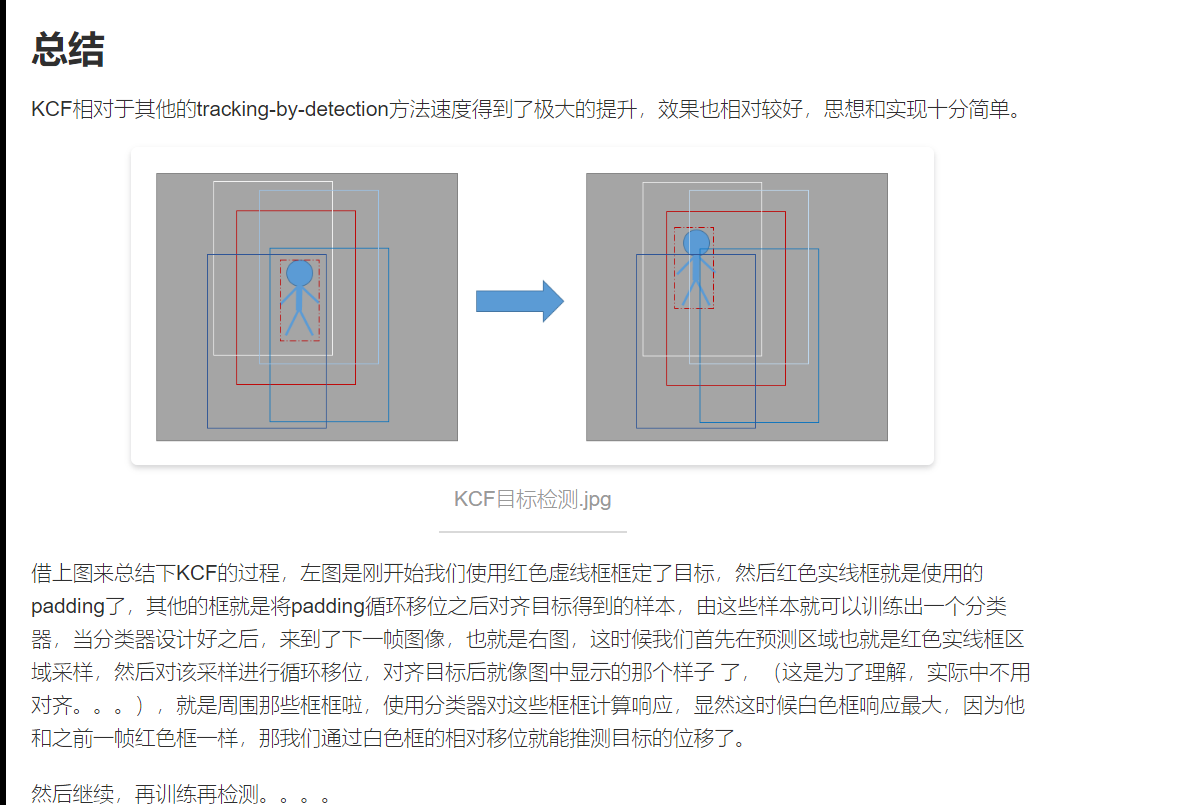
最后做的一个总结部分
参考链接:https://www.cnblogs.com/YiXiaoZhou/p/5925019.html
代码:
第一步: 进行 argparse参数设置
第二步:使用字典构造已有的追踪目标的方法
第三步:使用cv2.multiTracker_create() 构造出追踪器集合trackers
第四步:使用cv2.capture进行视频的读入
第五步:while True循环,使用cv2.read() 读入图片
第六步:使用cv2.resize进行图片的放缩变换
第七步:trackers.apply(frame)对图片运用追踪算法
第八步:循环boxes对图像进行画图操作
第九步:展示图片,
第十步:并判断按键,如果按s,进行box的添加,如果按ESC键就退出
第十一步:如果按s,使用box = cv2.selectROI()进行区域的选择,并使用trackers.add将追踪器和图片,以及区域进行添加
import argparse
import cv2
import time # 第一步进行参数设置
ap = argparse.ArgumentParser()
ap.add_argument('-v', '--video', type=str, default='videos/soccer_01.mp4',
help='path to input video file')
ap.add_argument('-t', '--tracker', type=str,
default='kcf', help='Opencv object tracker type') args = vars(ap.parse_args()) # opencv已经实现的追踪算法
# 第二步:构造cv2已有追踪算法的列表
OPENCV_OBJECT_TRACKERS = {
"csrt": cv2.TrackerCSRT_create,
"kcf": cv2.TrackerKCF_create,
"boosting": cv2.TrackerBoosting_create,
"mil": cv2.TrackerMIL_create,
"tld": cv2.TrackerTLD_create,
"medianflow": cv2.TrackerMedianFlow_create,
"mosse": cv2.TrackerMOSSE_create
} # 第三步:实例化追踪器
# 实例化Opencv's multi-object tracker
trackers = cv2.MultiTracker_create() # 第四步:使用cv2.VideoCapture读取视频
vs = cv2.VideoCapture(args['video']) while True:
# 第五步:读入第一张图片
frame = vs.read()
frame = frame[1]
# 到头了就结束
if frame is None:
break # 第六步:使用cv2.resize对图像进行长宽的放缩操作
h, w = frame.shape[:2]
width = 600
r = width / float(w)
dim = (width, int(r * h))
frame = cv2.resize(frame, dim, cv2.INTER_AREA) # 第七步:使用trackers.apply获得矩形框
(success, boxes) = trackers.update(frame) # 第八步:循环多组矩形框,进行画图操作
for box in boxes:
(x, y, w, h) = [int(v) for v in box]
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 2) # 第九步:进行图像展示
cv2.imshow('Frame', frame) # 第十步:判断按键,如果是s的话,进行画出新的box
key = cv2.waitKey(100) & 0xff if key == ord('s'):
# 第十一步:选择一个区域,按s键,并将tracker追踪器,frame和box传入到trackers中
box = cv2.selectROI('Frame', frame, fromCenter=False,
showCrosshair=True)
tracker = OPENCV_OBJECT_TRACKERS[args['tracker']]()
trackers.add(tracker, frame, box) elif key == 27:
break vs.release()
cv2.destroyAllWindows()

区域选择 追踪效果
机器学习进阶-目标跟踪-KCF目标跟踪方法 1.cv2.multiTracker_create(构造选框集合) 2. cv2.TrackerKCF_create(获得KCF追踪器) 3. cv2.resize(变化图像大小) 4.cv2.selectROI(在图像上框出选框)的更多相关文章
- layer弹出信息框API
首先向大家推荐layer,在这里也非常感谢贤心的贡献,非常不错的信息框及弹出层解决方案,为一些项目的前端开发提高了很大的效率,希望layer 越办越好! 下面是API,呵呵,官方抄袭过来的,为了自己看 ...
- KCF目标跟踪方法分析与总结
KCF目标跟踪方法分析与总结 correlation filter Kernelized correlation filter tracking 读"J. F. Henriques, R. ...
- 使用Opencv中matchTemplate模板匹配方法跟踪移动目标
模板匹配是一种在图像中定位目标的方法,通过把输入图像在实际图像上逐像素点滑动,计算特征相似性,以此来判断当前滑块图像所在位置是目标图像的概率. 在Opencv中,模板匹配定义了6种相似性对比方式: C ...
- 机器学习进阶-目标追踪-SSD多进程执行 1.cv2.dnn.readnetFromCaffe(用于读取已经训练好的caffe模型) 2.delib.correlation_tracker(生成追踪器) 5.cv2.writer(将图片写入视频中) 6.cv2.dnn.blobFromImage(图片归一化) 10.multiprocessing.process(生成进程)
1. cv2.dnn.readNetFromCaffe(prototxt, model) 用于进行SSD网络的caffe框架的加载 参数说明:prototxt表示caffe网络的结构文本,model ...
- 使用Opencv中均值漂移meanShift跟踪移动目标
Mean Shift均值漂移算法是无参密度估计理论的一种,无参密度估计不需要事先知道对象的任何先验知识,完全依靠训练数据进行估计,并且可以用于任意形状的密度估计,在某一连续点处的密度函数值可由该点邻域 ...
- SilverLight 页面后台方法XX.xaml.cs 创建JS,调用JS ,弹出提示框
1.Invoke和InvokeSelf [c-sharp] view plaincopy public partial class CreateJSDemo : UserControl { publi ...
- 语义分割(semantic segmentation) 常用神经网络介绍对比-FCN SegNet U-net DeconvNet,语义分割,简单来说就是给定一张图片,对图片中的每一个像素点进行分类;目标检测只有两类,目标和非目标,就是在一张图片中找到并用box标注出所有的目标.
from:https://blog.csdn.net/u012931582/article/details/70314859 2017年04月21日 14:54:10 阅读数:4369 前言 在这里, ...
- jQuery - 选中复选框则弹出提示框
<!DOCTYPE html> <html> <head lang="en"> <meta charset="UTF-8&quo ...
- [转]js中confirm实现执行操作前弹出确认框的方法
原文地址:http://www.jb51.net/article/56986.htm 本文实例讲述了js中confirm实现执行操作前弹出确认框的方法.分享给大家供大家参考.具体实现方法如下: 现在在 ...
随机推荐
- bzoj4020: 未来程序·改
只需写一个解释器 第一次预处理将输入进行分词,分割出 关键字,运算符,变量/函数名,整数常量,并对变量/函数名离散化以便处理 第二次预处理建语法树,每个节点存节点类型,变量定义表等信息 运行时在语法树 ...
- 服务注册发现consul之四: 分布式锁之四:基于Consul的KV存储和分布式信号量实现分布式锁
一.基于key/value实现 我们在构建分布式系统的时候,经常需要控制对共享资源的互斥访问.这个时候我们就涉及到分布式锁(也称为全局锁)的实现,基于目前的各种工具,我们已经有了大量的实现方式,比如: ...
- ubuntu的一些常用命令及疑难杂症
记录ubuntu下各种注意事项及常用命令 1,发热:因为硬件厂商对linux类系统的支持不足,驱动不会自动安装,所以要自己装... http://www.linuxidc.com/Linux/2015 ...
- library之目录
组件之fragment: Android viewpager结合fragment的相关优化: 组件之webview: WebView的使用及实战(cookie同步和cookie清除); Android ...
- windows10如何查看wifi密码
1.首先,在你的电脑的右下角的WiFi的图标,右击它,选择"网络和internet设置"或者选择打开设置 :如下图 点击"更改适配器选项" 选择 WLAN选项, ...
- Abp.AutoMapper扩展(1) --static class AutoMapExtensions
// 摘要: // Converts an object to another using AutoMapper library. Creates a new object ...
- web项目中添加MySQL驱动
1.我这里采用yml文件来配置,yml有配置层次清晰,方便操作的好处: 将application.properties后缀改成yml,即配置文件变成application.yml 我的applicat ...
- html代码段
添加icon<link rel="shortcut icon" href="img/100du.ico"/>
- geoserver sld显示中文标签 style配置
样式1: <?xml version="1.0" encoding="GB2312"?><sld:StyledLayerDescriptor ...
- centos找不到vim命令
linux系统执行vim命令时,提示centos -bash : vim:command not found 这个时候需要检查vim编辑器是否安装: 输入rpm -qa|grep vim命令, ...