Using rqt_console and roslaunch
Description: This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once
debug工具
- rqt_console
- rqt_logger_level
rosrun rqt_console rqt_console #界面化的实时的日志监控
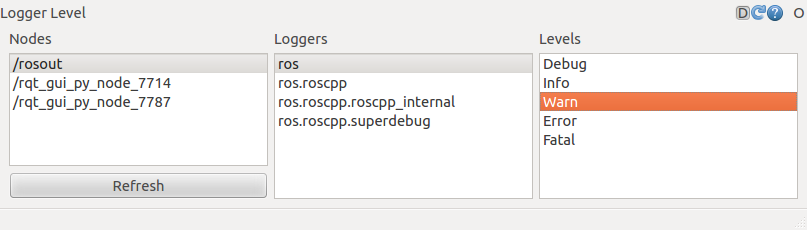
rosrun rqt_logger_level rqt_logger_level #界面化的用于设置日志级别
支持的日志级别
Fatal
Error
Warn
Info
Debug
roslaunch
echo $ROS_PACKAGE_PATH
<launch> --标明这是一个launch file
<group ns="turtlesim1"> --不同的namespace 允许有起2个同样name的node
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic"> --起一个mimic node.
<remap from="input" to="turtlesim1/turtle1"/> --This renaming will cause turtlesim2 to mimic turtlesim1
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
读取turtlemimic.launch文件启动node
roslaunch beginner_tutorials turtlemimic.launch
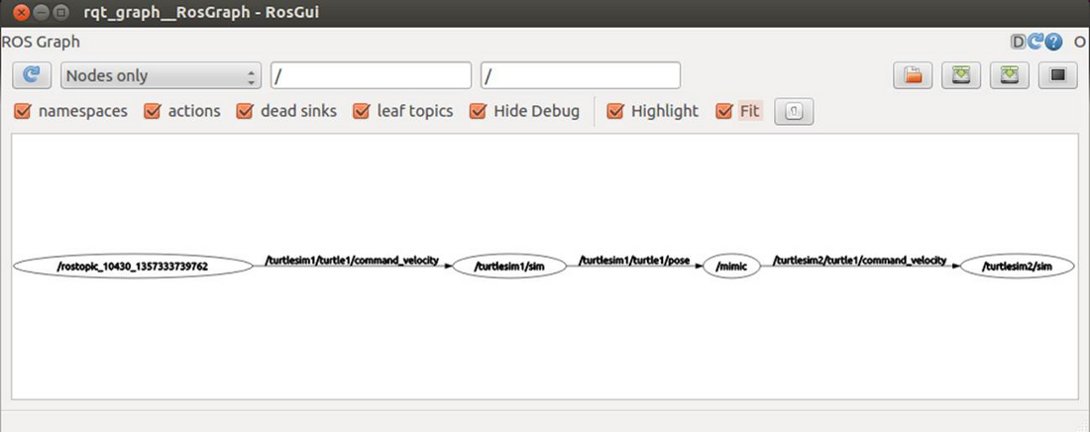
rqt或rqt_graph查看roslaunch实际做了什么
Using rqt_console and roslaunch的更多相关文章
- 理解ROS rqt_console和 roslaunch
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS ...
- ROS学习(九)—— rqt_console 和 roslaunch
一.rqt_console 和rqt_logger_level 1.作用: rqt_console依据ROS编译日志,输出节点信息 rqt_logger_level可以改变节点的警告出差的警告等级 2 ...
- ROS学习手记 - 6 使用ROS中的工具:rqt_console & roslaunch & rosed
http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch Using rqt_console and roslaunch This tuto ...
- 使用 rqt_console 和 roslaunch---8
使用 rqt_console 和 roslaunch Description: 本教程介绍如何使用rqt_console和rqt_logger_level进行调试,以及如何使用roslaunch同时运 ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- ROS教程
Learning ROS 学习ROS Depending on your learning style and preferences, you can take two approaches to ...
- ROS官网新手级教程总结
第 1 关卡:安装和配置 ROS 环境 目标:在计算机上安装和配置 ROS 环境. 安装 ROS 按照 ROS 安装说明进行安装. 管理环境 确定环境变量 ROS_ROOT 和 ROS_PACKAGE ...
随机推荐
- Tensor基本操作
Tensor(张量) 1.Tensor,又名张量,从工程角度来说,可简单地认为它就是一个数组,且支持高效的科学计算.它可以是一个数(标量).一维数组(向量).二维数组(矩阵)或更高维的数组(高阶数组) ...
- Git使用的自我总结
一.Git安装后打开Git bash,第一次使用 1.Git账号信息配置 2.用命令git clone从远程库克隆 会在克隆的项目下有一个隐藏的.git目录,这个目录是Git来跟踪管理版本库的,没事千 ...
- Redis_MISCONF Redis is configured to save RDB snapshots, but is currently not able to persist on disk问题解决
原因:可参考https://www.linuxidc.com/Linux/2012-07/66079.htm 解决方案一: 修改redis.conf中 stop-writes-on-bgsave-er ...
- Java课堂笔记(零):内容索引
回想自己学习和使用Java的时间也是很长了.本科期间课堂上浅尝辄止地学习了点皮毛,后来也是搁置不用,未曾深入研究.研究生期间因为项目和实习的原因,基本算是重新拾起Java这门语言,并且接触到了Spri ...
- python面向对象的知识梳理
面向对象(Object Oriented Programming) 三个基本特征: 1.封装:包含两个概念,对象将变量(状态)和方法(用来改变状态或执行涉及状态的计算)集中在一个地方—即对象本身. 通 ...
- 小程序----选择地理位置 ( wx.chooseLocation ) 和 获取地理位置 (wx.getSetting)
问题来了:假如我第一次使用wx.chooseLocation()获取权限被拒绝,然后使用wx.getSetting()来重新获取权限该怎么做呢? 思路:wx.chooseLocation()有fail ...
- 原生js实现删除class和添加class
内容来自百度搜索 //判断样式是否存在 function hasClass(ele, cls) { return ele.className.match(new RegExp("(\ ...
- HBuilder git使用-分工合作
1.初始项目的创建 创建好项目,在项目名上右键,Team->共享 完成后,就实现了本地仓库的建立,另外你要注意现在创建的项目所有文件变成了红色,Git Repositories视图列出了相应的本 ...
- AI应用开发实战
AI应用开发实战 出发点 目前,人工智能在语音.文字.图像的识别与解析领域带来了跨越式的发展,各种框架.算法如雨后春笋一般,互联网上随处可见与机器学习有关的学习资源,各大mooc平台.博客.公开课都推 ...
- 逆天的 GRUB
参考资料 GRUB 的文档在这里:https://www.gnu.org/software/grub/manual/grub/ Linux 的启动过程和 GRUB 的地位 Linux 系统启动的过程是 ...