Linux V4L2之camera
一、硬件知识
1. 摄像头硬件结构和工作原理,如图1&图2
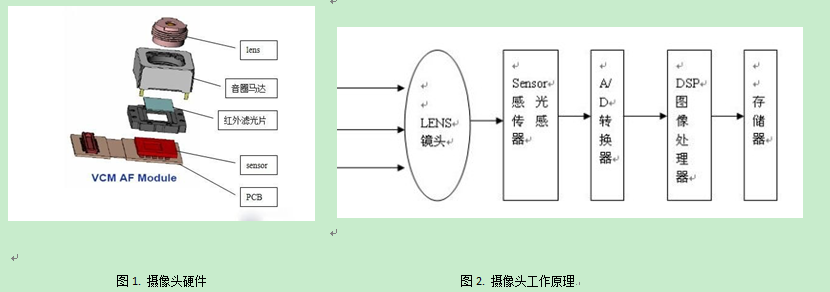
外部光线穿过lens镜头,经过红外滤光片后光学图像投射到传感器上,然后光学图像被转换成电信号,电信号再经过模数转换变为数字信号,数字信号经过DSP加工处理,
再被送到接收端进行处理,最终转换成屏幕上能够看到的图像。 其中:
1)滤光片作用:
a. 滤除红外线,滤除对可见光有干扰的红外光,使成像效果更清晰。
b. 修整进来的光线,感光芯片由感光体(CELL)构成,最好的光线是直射进来,但为了怕干扰到邻近感光体
就需要对光线加以修整,因此那片滤光片不是玻璃,而是石英片,利用石英的物理偏光特性,把进来
的光线保留直射部份,反射掉斜射部份,避免去影响旁边的感光点。
2)常见的sensor传感器主要有两种:
a. CCD传感器(Chagre Couled Device),即电荷耦合器。
b. CMOS传感器(Complementary Metal-Oxide Semiconductor),即互补性金属氧化物半导体。
CCD的优势在于成像质量好,但是制造工艺复杂,成本高昂,且耗电高。在相同分辨率下,CMOS价格
比CCD便宜,但图像质量相比CCD来说要低一些。CMOS影像传感器相对CCD具有耗电低的优势,加上随
着工艺技术的进步,CMOS的画质水平也不断地在提高,所以目前市面上的手机摄像头都采用CMOS传感器。
3)DSP (DIGITAL SIGNAL PROCESSING):
主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。结构框架: ISP(image signal processor)(镜像信号处理器)、JPEG encoder(JPEG图像解码器)、USB device controller(USB设备控制器)
对于低分辨率来说(300W像素以下), 一般摄像头自带DSP/ISP处理模块,提供简单的自动白平衡、 gamma、sharpness等功能,而高分辨率或者需要提供更增强功能时,可以使用处理器自带的ISP模块(前提是处理器有)。
一般ISP支持输出YUV、RGB、JPEG格式。
2. 摄像头引脚作用&硬件连接:
目前摄像头接口主要采用MIPI CSI & DVP, 前者是串行(多组差分信号线), 后者是并口传输(8/10bit)。 图3以DVP接口介绍各个引脚作用及硬件连接:
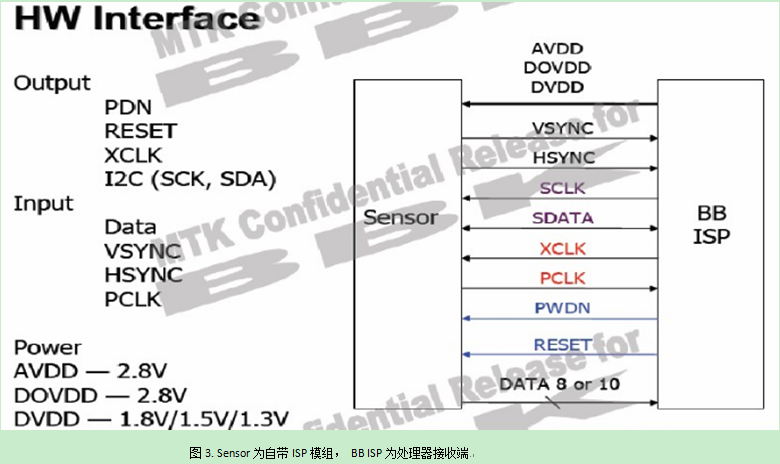
DVP分为三个部分:
1)输入总线:
a. data为sensor的数据管脚,可输出8/10bit并口数据到处理器接受端。
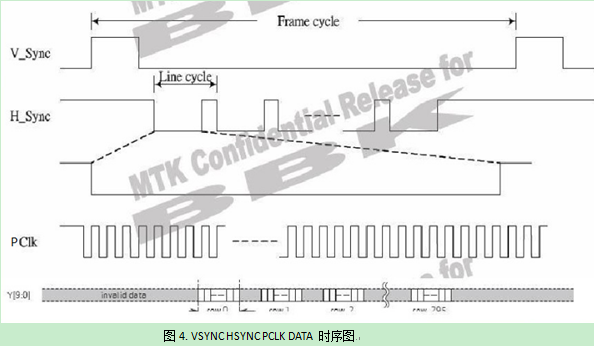
b. VSYNC为帧同步信号管脚,一个VSYNC信号结束表示一个画面的数据已经传输完毕。
c. HSYNC为行同步信号管脚,一个HSYNC信号结束表示一行的数据已经传输完毕。
p. PCLK为像素同步信号管脚,一个PCLK信号结束表示一个像素的数据(大小取决格式)已经传输完毕。
以上管脚的关系如下图:
2)输出总线 :
a. PDN(power down enable), camera使能管脚,当PDN=1时, 一切对camera操作都是无效的。
b. RESET, 复位管脚, 低电平有效。
c. XCLK(MCLK), sensor的工作时钟管脚,可由外部晶振或者处理器提供。
d. I2C总线, 处理器与sensor通信管脚, 用于配置sensor。
3)Power:
a. AVDD 模拟电压
b. DOVDD GPIO口数字电压
c. DVDD 核工作电压
二、成像原理
本节主要讲解目前主流的bayer格式图片的成像原理, bayer格式图片是伊士曼·柯达公司科学家Bryce Bayer发明的,Bryce Bayer所发明的拜耳阵列被广泛运用数字图像。
对于彩色图像,需要采集最基本的颜色,如RGB三种颜色,最简单的方法就是用滤镜的方法,红色的滤镜透过红色的波长,绿色的滤镜透过绿色的波长,蓝色的滤镜透过蓝色的波长。如果要同时采集三个基本色,则需要三块滤镜,这样价格昂贵,且不好制造,因为三块滤镜都必须保证每一个像素点都对齐。当用bayer格式的时候,很好的解决了这个问题。bayer 格式在每个像素(pixel)上只设置一种颜色滤镜,外部光线在每个像素点上存储是单色的, 因此经过ADC转换出来的原始数据称为RAW RGB DATA,通过分析人眼对颜色的感知发现,人眼对绿色比较敏感,所以一般bayer格式的图片绿色格式的像素是是R和B像素的和。

当Image Sensor往外逐行输出数据时,像素的序列为GRGRGR.../BGBGBG...(交替)。这样阵列的设计,使得RGB传感器为全色传感器的1/3。
每一个像素仅仅包括了光谱的一部分,必须通过插值来实现每个像素的RGB值。为了从Bayer格式得到每个像素的RGB格式,我们需要通过插值填补缺失的2个色彩。插值的方法有很多(包括领域、线性、3*3等),速度与质量权衡,最好是线性插值补偿算法。
从图5 Sensor 像素阵列来看, 存在4中分布格式:

对于图6(a)(b)来说, G像素的R、B分量分别取两个邻域的平均値,由于存在(a)(b)两种分布情况,所以直接去4个相邻域的平均値既是G像素的R&B分量。
对于图6(c)来说,R像素的G分量可以取4个相邻域的平均值,B分量取外围4个域的平均值。
对于图6(d)来说,B像素的G分量可以取4个相邻域的平均值,R分量取外围4个域的平均值。
当然, RAW RGB DATA也可以转换成YUV格式或者 先转成RGB再转换YUV,就不详解了......
三、V4L2软件架构
1. 概述
Video4 for Linux 2是Linux内核中关于视频设备的内核驱动框架,为上层的访问底层的视频设备提供了统一的接口。凡是内核中的子系统都有抽象底层硬件的差异,为上层提供统一的接口和提取出公共代码避免代码冗余等。 V4L2支持三类设备:视频输入输出设备、VBI设备和radio设备(其实还支持更多类型的设备,暂不讨论),分别会在/dev目录下产生videoX、radioX和vbiX设备节点。 图7是V4L2在linux系统中的结构图:
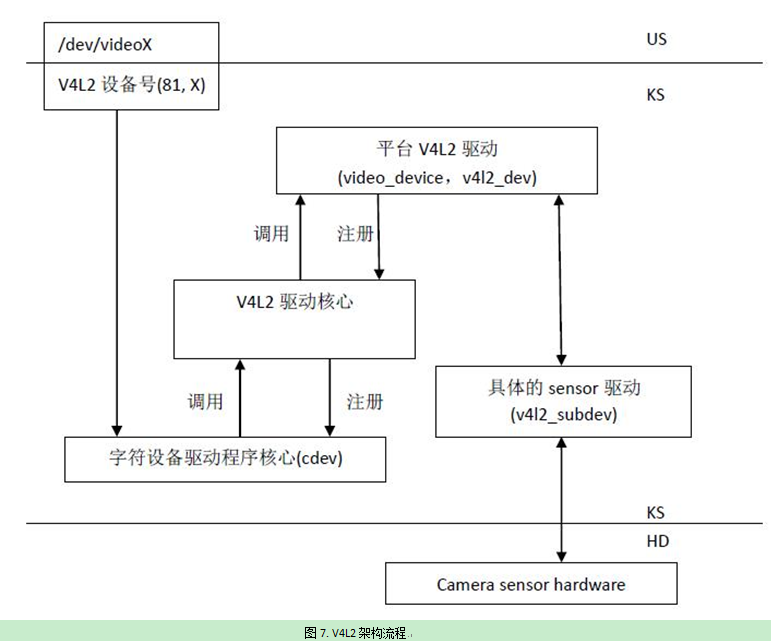
Linux系统中视频输入设备主要包括以下四个部分:
字符设备驱动:V4L2本身就是一个字符设备,具有字符设备所有的特性,暴露接口给用户空间;
V4L2驱动核心:主要是构建一个内核中标准视频设备驱动的框架,为视频操作提供统一的接口函数;
平台V4L2设备驱动:在V4L2框架下,根据平台自身的特性实现与平台相关的V4L2驱动部分,包括注册video_device和v4l2_dev;
具体的sensor驱动:主要上电、提供工作时钟、视频图像裁剪、流IO开启等,实现各种设备控制方法供上层调用并注册v4l2_subdev。
2. 详解V4L2框架
v4L2的核心源码位于drivers/media/v4l2-core,根据功能可以划分为四类:
字符设备模块:由v4l2-dev.c实现,主要作用申请字符主设备号、注册class和提供video device注册注销等相关函数;
V4L2基础框架:由v4l2-device.c、v4l2-subdev.c、v4l2-fh.c、v4l2-ctrls.c等文件构建V4L2基础框架;
videobuf管理:由videobuf2-core.c、videobuf2-dma-contig.c、videobuf2-dma-sg.c、videobuf2-memops.c、videobuf2-vmalloc.c、v4l2-mem2mem.c等文件实现,完成videobuffer的分配、管理和注销;
Ioctl框架:由v4l2-ioctl.c文件实现,构建V4L2ioctl的框架。
2.1 V4L2基础框架如图8:
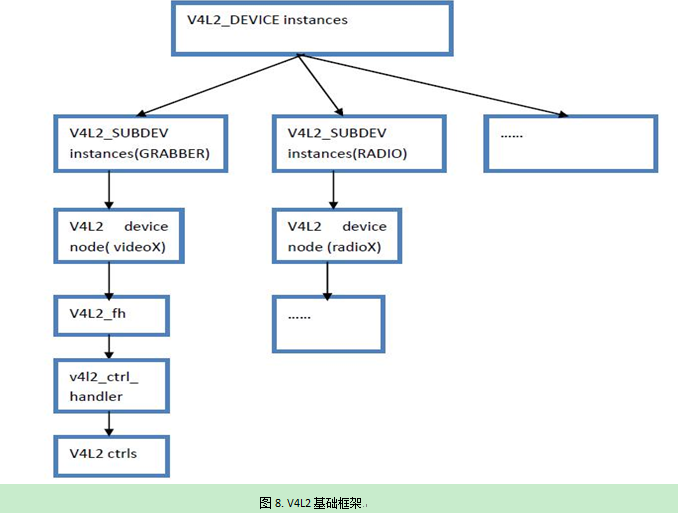
上图V4L2框架是一个标准的树形结构,v4l2_device充当了父设备,通过链表把所有注册到其下的子设备管理起来,这些设备可以是GRABBER、VBI或RADIO。V4l2_subdev是子设备,v4l2_subdev结构体包含了对设备操作的ops和ctrls,这部分代码和硬件相关,需要驱动工程师根据硬件实现控制上下电、读取ID、饱和度、对比度和视频数据流打开关闭等接口函数。Video_device用于创建子设备节点,把操作设备的接口暴露给用户空间。V4l2_fh是每个子设备的文件句柄,在打开设备节点文件时设置,方便上层索引到v4l2_ctrl_handler,v4l2_ctrl_handler管理设备的ctrls,这些ctrls(摄像头设备)包括调节饱和度、对比度和白平衡等。
结构体v4l2_device、video_device、v4l2_subdev和v4l2_ctrl_handler是构成框架的主要元素,现分别介绍:
- . struct v4l2_device :
- v4l2_device在v4l2框架中充当所有v4l2_subdev的父设备,管理着注册在其下的子设备
- struct v4l2_device {
- structlist_head subdevs; //用链表管理注册的subdev
- charname[V4L2_DEVICE_NAME_SIZE]; //device 名字
- structkref ref; //引用计数
- .........
- };
- 可以看出v4l2_device的主要作用是管理注册在其下的子设备,方便系统查找引用到。
- v4l2_device的注册和注销:
- int v4l2_device_register(struct device*dev, struct v4l2_device *v4l2_dev)
- static void v4l2_device_release(struct kref *ref)
- . struct v4l2_subdev :
- v4l2_subdev代表子设备,包含了子设备的相关属性和操作。结构体原型:
- struct v4l2_subdev {
- struct v4l2_device *v4l2_dev; //指向父设备
- conststruct v4l2_subdev_ops *ops; //提供一些控制v4l2设备的接口
- conststruct v4l2_subdev_internal_ops *internal_ops; //向V4L2框架提供的接口函数
- structv4l2_ctrl_handler *ctrl_handler; //subdev控制接口
- charname[V4L2_SUBDEV_NAME_SIZE];
- struct video_device *devnode;
- ..........
- };
- 每个子设备驱动都需要实现一个v4l2_subdev结构体,v4l2_subdev可以内嵌到其它结构体中,也可以独立使用。
- 结构体中包含了对子设备操作的成员v4l2_subdev_ops和v4l2_subdev_internal_ops
- struct v4l2_subdev_ops {
- const struct v4l2_subdev_core_ops *core; //视频设备通用的操作:初始化、加载FW、上电和RESET等
- const struct v4l2_subdev_tuner_ops *tuner; //tuner特有的操作
- const struct v4l2_subdev_audio_ops *audio; //audio特有的操作
- const struct v4l2_subdev_video_ops *video; //视频设备的特有操作:裁剪图像、开关视频流等
- const struct v4l2_subdev_pad_ops *pad;
- ..........
- };
- struct v4l2_subdev_internal_ops {
- /* 当subdev注册时被调用,读取IC的ID来进行识别 */
- int(*registered)(struct v4l2_subdev *sd);
- void(*unregistered)(struct v4l2_subdev *sd);
- /* 当设备节点被打开时调用,通常会给设备上电和设置视频捕捉FMT */
- int(*open)(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh);
- int(*close)(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh);
- };
- 视频设备通常需要实现core和video成员,这两个OPS中的操作都是可选的,但是对于视频流设备video->s_stream(开启或关闭流IO)必须要实现。v4l2_subdev_internal_ops是向V4L2框架提供的接口,只能被V4L2框架层调用。在注册或打开子设备时,进行一些辅助性操作。
- Subdev的注册和注销:
- int v4l2_device_register_subdev(struct v4l2_device *v4l2_dev, struct v4l2_subdev *sd)
- void v4l2_device_unregister_subdev(struct v4l2_subdev *sd)
- . struct video_device
- video_device结构体用于在/dev目录下生成设备节点文件,把操作设备的接口暴露给用户空间
- struct video_device
- {
- const struct v4l2_file_operations *fops; //V4L2设备操作集合
- struct cdev *cdev; //字符设备
- struct v4l2_device *v4l2_dev;
- struct v4l2_ctrl_handler *ctrl_handler;
- struct vb2_queue *queue; //指向video buffer队列
- int vfl_type; /* device type */
- intminor; //次设备号
- /*ioctl回调函数集,提供file_operations中的ioctl调用 */
- const struct v4l2_ioctl_ops *ioctl_ops;
- ..........
- };
- Video_device分配和释放, 用于分配和释放video_device结构体:
- struct video_device *video_device_alloc(void)
- void video_device_release(struct video_device *vdev)
- video_device注册和注销,实现video_device结构体的相关成员后,就可以调用下面的接口进行注册:
- static inline int __must_check video_register_device(struct video_device *vdev, inttype, int nr)
- void video_unregister_device(struct video_device*vdev);
- vdev:需要注册和注销的video_device;
- type:设备类型,包括VFL_TYPE_GRABBER、VFL_TYPE_VBI、VFL_TYPE_RADIO和VFL_TYPE_SUBDEV。
- nr:设备节点名编号,如/dev/video[nr]。
- . struct v4l2_ctrl_handler
- v4l2_ctrl_handler是用于保存子设备控制方法集的结构体,结构体如下:
- struct v4l2_ctrl_handler {
- struct list_head ctrls;
- struct list_head ctrl_refs;
- struct v4l2_ctrl_ref *cached;
- struct v4l2_ctrl_ref **buckets;
- v4l2_ctrl_notify_fnc notify;
- u16 nr_of_buckets;
- int error;
- };
- 其中成员ctrls作为链表存储包括设置亮度、饱和度、对比度和清晰度等方法,可以通过v4l2_ctrl_new_xxx()函数创建具体方法并添加到链表ctrls。
2.2 videobuf管理
在讲解v4l2的buffer管理前,先介绍v4l2的IO访问, V4L2支持三种不同IO访问方式(内核中还支持了其它的访问方式,暂不讨论):
read和write:是基本帧IO访问方式,通过read读取每一帧数据,数据需要在内核和用户之间拷贝,这种方式访问速度可能会非常慢;
内存映射缓冲区(V4L2_MEMORY_MMAP):是在内核空间开辟缓冲区,应用通过mmap()系统调用映射到用户地址空间。这些缓冲区可以是大而连续DMA缓冲区、通过vmalloc()创建的虚拟缓冲区,或者直接在设备的IO内存中开辟的缓冲区(如果硬件支持);
用户空间缓冲区(V4L2_MEMORY_USERPTR):是用户空间的应用中开辟缓冲区,用户与内核空间之间交换缓冲区指针。很明显,在这种情况下是不需要mmap()调用的,但驱动为有效的支持用户空间缓冲区,其工作将也会更困难。
read和write方式属于帧IO访问方式,每一帧都要通过IO操作,需要用户和内核之间数据拷贝,而后两种是流IO访问方式,不需要内存拷贝,访问速度比较快。内存映射缓冲区访问方式是比较常用的方式。
现以V4L2_MEMORY_MMAP简单介绍数据流通过程:

Camera sensor捕捉到图像数据通过并口或MIPI传输到CAMIF(camera interface),CAMIF可以对图像数据进行调整(翻转、裁剪和格式转换等)。然后DMA控制器设置DMA通道请求AHB将图像数据传到分配好的DMA缓冲区。待图像数据传输到DMA缓冲区之后,mmap操作把缓冲区映射到用户空间,应用就可以直接访问缓冲区的数据。而为了使设备支持流IO这种方式,v4l2需要实现对video buffer的管理,即实现:
- /* vb2_queue代表一个videobuffer队列,vb2_buffer是这个队列中的成员,vb2_mem_ops是缓冲内存的操作函数集,vb2_ops用来管理队列 */
- struct vb2_queue {
- enum v4l2_buf_type type; //buffer类型
- unsigned int io_modes; //访问IO的方式:mmap、userptr etc
- const struct vb2_ops *ops; //buffer队列操作函数集合
- const struct vb2_mem_ops *mem_ops; //buffer memory操作集合
- struct vb2_buffer *bufs[VIDEO_MAX_FRAME]; //代表每个frame buffer
- unsignedint num_buffers; //分配的buffer个数
- ..........
- };
- /* vb2_mem_ops包含了内存映射缓冲区、用户空间缓冲区的内存操作方法 */
- struct vb2_mem_ops {
- void *(*alloc)(void *alloc_ctx, unsignedlong size); //分配视频缓存
- void (*put)(void *buf_priv); //释放视频缓存
- /* 获取用户空间视频缓冲区指针 */
- void *(*get_userptr)(void *alloc_ctx, unsigned long vaddr, unsignedlong size, int write);
- void (*put_userptr)(void *buf_priv); //释放用户空间视频缓冲区指针
- /* 用于缓存同步 */
- void (*prepare)(void *buf_priv);
- void (*finish)(void *buf_priv);
- /* 缓存虚拟地址 & 物理地址 */
- void *(*vaddr)(void *buf_priv);
- void *(*cookie)(void *buf_priv);
- unsignedint (*num_users)(void *buf_priv); //返回当期在用户空间的buffer数
- int (*mmap)(void *buf_priv, structvm_area_struct *vma); //把缓冲区映射到用户空间
- ..............
- };
- /* mem_ops由kernel自身实现并提供了三种类型的视频缓存区操作方法:连续的DMA缓冲区、集散的DMA缓冲区以及vmalloc创建的缓冲区,分别由videobuf2-dma-contig.c、videobuf2-dma-sg.c和videobuf-vmalloc.c文件实现,可以根据实际情况来使用。*/
- /* vb2_ops是用来管理buffer队列的函数集合,包括队列和缓冲区初始化等 */
- struct vb2_ops {
- //队列初始化
- int(*queue_setup)(struct vb2_queue *q, const struct v4l2_format *fmt,
- unsigned int *num_buffers, unsigned int*num_planes,
- unsigned int sizes[], void *alloc_ctxs[]);
- //释放和获取设备操作锁
- void(*wait_prepare)(struct vb2_queue *q);
- void(*wait_finish)(struct vb2_queue *q);
- //对buffer的操作
- int(*buf_init)(struct vb2_buffer *vb);
- int(*buf_prepare)(struct vb2_buffer *vb);
- int(*buf_finish)(struct vb2_buffer *vb);
- void(*buf_cleanup)(struct vb2_buffer *vb);
- //开始/停止视频流
- int(*start_streaming)(struct vb2_queue *q, unsigned int count);
- int(*stop_streaming)(struct vb2_queue *q);
- //把VB传递给驱动,以填充frame数据
- void(*buf_queue)(struct vb2_buffer *vb);
- };
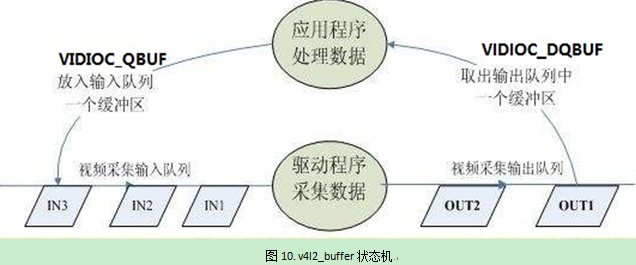
一个frame buffer(vb2_buffer/v4l2_buffer)可以有三种状态:
1. 在驱动的输入队列中,驱动程序将会对此队列中的缓冲区进行处理,用户空间通过IOCTL:VIDIOC_QBUF 把缓冲区放入到队列。对于一个视频捕获设备,传入队列中的缓冲区是空的,驱动会往其中填充数据;
2. 在驱动的输出队列中,这些缓冲区已由驱动处理过,对于一个视频捕获设备,缓存区已经填充了视频数据,正等用户空间来认领;
3. 用户空间状态的队列,已经通过IOCTL:VIDIOC_DQBUF传出到用户空间的缓冲区,此时缓冲区由用户空 间拥有,驱动无法访问。
这三种状态的切换如下图所示:
最终落脚点的struct v4l2_buffer结构如下:
- struct v4l2_buffer {
- __u32 index; //buffer 序号
- __u32 type; //buffer类型
- __u32 bytesused; //缓冲区已使用byte数
- structtimeval timestamp; //时间戳,代表帧捕获的时间
- __u32 memory; //表示缓冲区是内存映射缓冲区还是用户空间缓冲区
- union {
- __u32 offset; //内核缓冲区的位置
- unsignedlong userptr; //缓冲区的用户空间地址
- structv4l2_plane *planes;
- __s32 fd;
- } m;
- __u32 length; //缓冲区大小,单位byte
- };
当用户空间拿到v4l2_buffer,可以获取到缓冲区的相关信息。Byteused是图像数据所占的字节数,如果是V4L2_MEMORY_MMAP方式,m.offset是内核空间图像数据存放的开始地址,会传递给mmap函数作为一个偏移,通过mmap映射返回一个缓冲区指针p,p+byteused是图像数据在进程的虚拟地址空间所占区域;如果是用户指针缓冲区的方式,可以获取的图像数据开始地址的指针m.userptr,userptr是一个用户空间的指针,userptr+byteused便是所占的虚拟地址空间,应用可以直接访问
2.3 Ioctl框架如图:
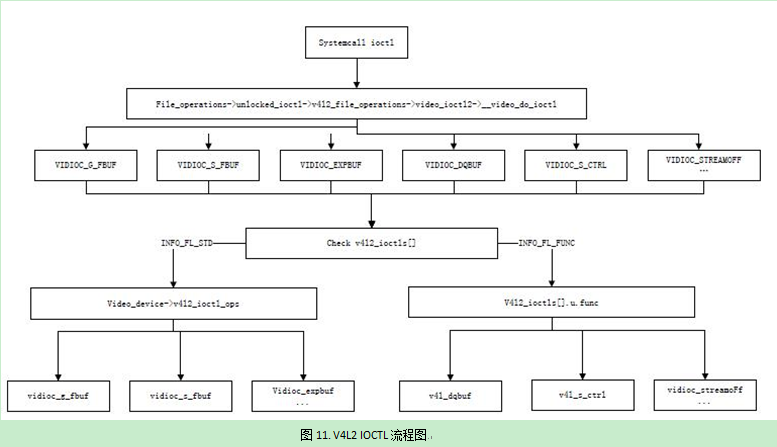
用户空间通过打开/dev/目录下的设备节点,获取到文件的file结构体,通过系统调用ioctl把cmd和arg传入到内核。通过一系列的调用后最终会调用到__video_do_ioctl函数,然后通过cmd检索v4l2_ioctls[],判断是INFO_FL_STD还是INFO_FL_FUNC。如果是INFO_FL_STD会直接调用到视频设备驱动中video_device->v4l2_ioctl_ops函数集。如果是INFO_FL_FUNC会先调用到v4l2自己实现的标准回调函数,然后根据arg再调用到video_device->v4l2_ioctl_ops或v4l2_fh->v4l2_ctrl_handler函数集。
四、用户空间访问 camera & 示例程序
- /*
- * V4L2 video capture example
- *
- * This program can be used and distributed without restrictions.
- *
- * This program is provided with the V4L2 API
- * see http://linuxtv.org/docs.php for more information
- */
- #include <stdio.h>
- #include <stdlib.h>
- #include <string.h>
- #include <assert.h>
- #include <getopt.h> /* getopt_long() */
- #include <fcntl.h> /* low-level i/o */
- #include <unistd.h>
- #include <errno.h>
- #include <sys/stat.h>
- #include <sys/types.h>
- #include <sys/time.h>
- #include <sys/mman.h>
- #include <sys/ioctl.h>
- #include <linux/videodev2.h>
- #define CLEAR(x) memset(&(x), 0, sizeof(x))
- enum io_method {
- IO_METHOD_READ,
- IO_METHOD_MMAP,
- IO_METHOD_USERPTR,
- };
- struct buffer {
- void *start;
- size_t length;
- };
- static char *dev_name;
- static enum io_method io = IO_METHOD_MMAP;
- static int fd = -;
- struct buffer *buffers;
- static unsigned int n_buffers;
- static int out_buf;
- static int force_format;
- static int frame_count = ;
- static void errno_exit(const char *s)
- {
- fprintf(stderr, "%s error %d, %s\n", s, errno, strerror(errno));
- exit(EXIT_FAILURE);
- }
- static int xioctl(int fh, int request, void *arg)
- {
- int r;
- do {
- r = ioctl(fh, request, arg);
- } while (- == r && EINTR == errno);
- return r;
- }
- static void process_image(const void *p, int size)
- {
- if (out_buf)
- fwrite(p, size, , stdout);
- fflush(stderr);
- fprintf(stderr, ".");
- fflush(stdout);
- }
- static void store_image(const char *buf_start, int size, int index)
- {
- char path[];
- snprintf(path, sizeof(path), "./yuyv%d.yuv", index);
- int fd = open(path, O_WRONLY|O_CREAT, );
- if (- == fd) {
- fprintf(stderr, "Cannot open '%s': %d, %s\n",
- path, errno, strerror(errno));
- exit(EXIT_FAILURE);
- }
- write(fd, buf_start, size);
- close(fd);
- }
- static int read_frame(void)
- {
- struct v4l2_buffer buf;
- unsigned int i;
- switch (io) {
- case IO_METHOD_READ:
- if (- == read(fd, buffers[].start, buffers[].length)) {
- switch (errno) {
- case EAGAIN:
- return ;
- case EIO:
- /* Could ignore EIO, see spec. */
- /* fall through */
- default:
- errno_exit("read");
- }
- }
- process_image(buffers[].start, buffers[].length);
- break;
- case IO_METHOD_MMAP:
- CLEAR(buf);
- buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- buf.memory = V4L2_MEMORY_MMAP;
- if (- == xioctl(fd, VIDIOC_DQBUF, &buf)) {
- switch (errno) {
- case EAGAIN:
- return ;
- case EIO:
- /* Could ignore EIO, see spec. */
- /* fall through */
- default:
- errno_exit("VIDIOC_DQBUF");
- }
- }
- assert(buf.index < n_buffers);
- //printf("buf.bytesused = %d\n", buf.bytesused);
- process_image(buffers[buf.index].start, buf.bytesused);
- store_image(buffers[buf.index].start, buf.bytesused, buf.index);
- if (- == xioctl(fd, VIDIOC_QBUF, &buf))
- errno_exit("VIDIOC_QBUF");
- break;
- case IO_METHOD_USERPTR:
- CLEAR(buf);
- buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- buf.memory = V4L2_MEMORY_USERPTR;
- if (- == xioctl(fd, VIDIOC_DQBUF, &buf)) {
- switch (errno) {
- case EAGAIN:
- return ;
- case EIO:
- /* Could ignore EIO, see spec. */
- /* fall through */
- default:
- errno_exit("VIDIOC_DQBUF");
- }
- }
- for (i = ; i < n_buffers; ++i)
- if (buf.m.userptr == (unsigned long)buffers[i].start
- && buf.length == buffers[i].length)
- break;
- assert(i < n_buffers);
- process_image((void *)buf.m.userptr, buf.bytesused);
- if (- == xioctl(fd, VIDIOC_QBUF, &buf))
- errno_exit("VIDIOC_QBUF");
- break;
- }
- return ;
- }
- /* two operations
- * step1 : delay
- * step2 : read frame
- */
- static void mainloop(void)
- {
- unsigned int count;
- count = frame_count;
- while (count-- > ) {
- for (;;) {
- fd_set fds;
- struct timeval tv;
- int r;
- FD_ZERO(&fds);
- FD_SET(fd, &fds);
- /* Timeout. */
- tv.tv_sec = ;
- tv.tv_usec = ;
- r = select(fd + , &fds, NULL, NULL, &tv);
- if (- == r) {
- if (EINTR == errno)
- continue;
- errno_exit("select");
- }
- if ( == r) {
- fprintf(stderr, "select timeout\n");
- exit(EXIT_FAILURE);
- }
- if (read_frame())
- break;
- /* EAGAIN - continue select loop. */
- }
- }
- }
- /*
- * one operation
- * step1 : VIDIOC_STREAMOFF
- */
- static void stop_capturing(void)
- {
- enum v4l2_buf_type type;
- switch (io) {
- case IO_METHOD_READ:
- /* Nothing to do. */
- break;
- case IO_METHOD_MMAP:
- case IO_METHOD_USERPTR:
- type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- if (- == xioctl(fd, VIDIOC_STREAMOFF, &type))
- errno_exit("VIDIOC_STREAMOFF");
- break;
- }
- }
- /* tow operations
- * step1 : VIDIOC_QBUF(insert buffer to queue)
- * step2 : VIDIOC_STREAMOFF
- */
- static void start_capturing(void)
- {
- unsigned int i;
- enum v4l2_buf_type type;
- switch (io) {
- case IO_METHOD_READ:
- /* Nothing to do. */
- break;
- case IO_METHOD_MMAP:
- for (i = ; i < n_buffers; ++i) {
- struct v4l2_buffer buf;
- CLEAR(buf);
- buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- buf.memory = V4L2_MEMORY_MMAP;
- buf.index = i;
- if (- == xioctl(fd, VIDIOC_QBUF, &buf))
- errno_exit("VIDIOC_QBUF");
- }
- type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- if (- == xioctl(fd, VIDIOC_STREAMON, &type))
- errno_exit("VIDIOC_STREAMON");
- break;
- case IO_METHOD_USERPTR:
- for (i = ; i < n_buffers; ++i) {
- struct v4l2_buffer buf;
- CLEAR(buf);
- buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- buf.memory = V4L2_MEMORY_USERPTR;
- buf.index = i;
- buf.m.userptr = (unsigned long)buffers[i].start;
- buf.length = buffers[i].length;
- if (- == xioctl(fd, VIDIOC_QBUF, &buf))
- errno_exit("VIDIOC_QBUF");
- }
- type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- if (- == xioctl(fd, VIDIOC_STREAMON, &type))
- errno_exit("VIDIOC_STREAMON");
- break;
- }
- }
- /* two operations
- * step1 : munmap buffers
- * steo2 : free buffers
- */
- static void uninit_device(void)
- {
- unsigned int i;
- switch (io) {
- case IO_METHOD_READ:
- free(buffers[].start);
- break;
- case IO_METHOD_MMAP:
- for (i = ; i < n_buffers; ++i)
- if (- == munmap(buffers[i].start, buffers[i].length))
- errno_exit("munmap");
- break;
- case IO_METHOD_USERPTR:
- for (i = ; i < n_buffers; ++i)
- free(buffers[i].start);
- break;
- }
- free(buffers);
- }
- static void init_read(unsigned int buffer_size)
- {
- buffers = calloc(, sizeof(*buffers));
- if (!buffers) {
- fprintf(stderr, "Out of memory\n");
- exit(EXIT_FAILURE);
- }
- buffers[].length = buffer_size;
- buffers[].start = malloc(buffer_size);
- if (!buffers[].start) {
- fprintf(stderr, "Out of memory\n");
- exit(EXIT_FAILURE);
- }
- }
- static void init_mmap(void)
- {
- struct v4l2_requestbuffers req;
- CLEAR(req);
- req.count = ;
- req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- req.memory = V4L2_MEMORY_MMAP;
- if (- == xioctl(fd, VIDIOC_REQBUFS, &req)) {
- if (EINVAL == errno) {
- fprintf(stderr, "%s does not support "
- "memory mapping\n", dev_name);
- exit(EXIT_FAILURE);
- } else {
- errno_exit("VIDIOC_REQBUFS");
- }
- }
- if (req.count < ) {
- fprintf(stderr, "Insufficient buffer memory on %s\n",
- dev_name);
- exit(EXIT_FAILURE);
- }
- buffers = calloc(req.count, sizeof(*buffers));
- if (!buffers) {
- fprintf(stderr, "Out of memory\n");
- exit(EXIT_FAILURE);
- }
- for (n_buffers = ; n_buffers < req.count; ++n_buffers) {
- struct v4l2_buffer buf;
- CLEAR(buf);
- buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- buf.memory = V4L2_MEMORY_MMAP;
- buf.index = n_buffers;
- if (- == xioctl(fd, VIDIOC_QUERYBUF, &buf))
- errno_exit("VIDIOC_QUERYBUF");
- buffers[n_buffers].length = buf.length;
- printf("buffers[%d].length=%d\n", n_buffers, buffers[n_buffers].length);
- buffers[n_buffers].start =
- mmap(NULL /* start anywhere */,
- buf.length,
- PROT_READ | PROT_WRITE /* required */,
- MAP_SHARED /* recommended */,
- fd, buf.m.offset);
- if (MAP_FAILED == buffers[n_buffers].start)
- errno_exit("mmap");
- }
- }
- static void init_userp(unsigned int buffer_size)
- {
- struct v4l2_requestbuffers req;
- CLEAR(req);
- req.count = ;
- req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- req.memory = V4L2_MEMORY_USERPTR;
- if (- == xioctl(fd, VIDIOC_REQBUFS, &req)) {
- if (EINVAL == errno) {
- fprintf(stderr, "%s does not support "
- "user pointer i/o\n", dev_name);
- exit(EXIT_FAILURE);
- } else {
- errno_exit("VIDIOC_REQBUFS");
- }
- }
- buffers = calloc(, sizeof(*buffers));
- if (!buffers) {
- fprintf(stderr, "Out of memory\n");
- exit(EXIT_FAILURE);
- }
- for (n_buffers = ; n_buffers < ; ++n_buffers) {
- buffers[n_buffers].length = buffer_size;
- buffers[n_buffers].start = malloc(buffer_size);
- if (!buffers[n_buffers].start) {
- fprintf(stderr, "Out of memory\n");
- exit(EXIT_FAILURE);
- }
- }
- }
- /* five operations
- * step1 : cap :query camera's capability and check it(is a video device? is it support read? is it support streaming?)
- * step2 : cropcap:set cropcap's type and get cropcap by VIDIOC_CROPCAP
- * step3 : set crop parameter by VIDIOC_S_CROP (such as frame type and angle)
- * step4 : set fmt
- * step5 : mmap
- */
- static void init_device(void)
- {
- struct v4l2_capability cap;
- struct v4l2_cropcap cropcap;
- struct v4l2_crop crop;
- struct v4l2_format fmt;
- unsigned int min;
- if (- == xioctl(fd, VIDIOC_QUERYCAP, &cap)) {
- if (EINVAL == errno) {
- fprintf(stderr, "%s is no V4L2 device\n",
- dev_name);
- exit(EXIT_FAILURE);
- } else {
- errno_exit("VIDIOC_QUERYCAP");
- }
- }
- if (!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE)) {
- fprintf(stderr, "%s is no video capture device\n",
- dev_name);
- exit(EXIT_FAILURE);
- }
- switch (io) {
- case IO_METHOD_READ:
- if (!(cap.capabilities & V4L2_CAP_READWRITE)) {
- fprintf(stderr, "%s does not support read i/o\n",
- dev_name);
- exit(EXIT_FAILURE);
- }
- break;
- case IO_METHOD_MMAP:
- case IO_METHOD_USERPTR:
- if (!(cap.capabilities & V4L2_CAP_STREAMING)) {
- fprintf(stderr, "%s does not support streaming i/o\n",
- dev_name);
- exit(EXIT_FAILURE);
- }
- break;
- }
- /* Select video input, video standard and tune here. */
- CLEAR(cropcap);
- cropcap.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- /* if device support cropcap's type then set crop */
- if ( == xioctl(fd, VIDIOC_CROPCAP, &cropcap)) {
- crop.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- crop.c = cropcap.defrect; /* reset to default */
- if (- == xioctl(fd, VIDIOC_S_CROP, &crop)) {
- switch (errno) {
- case EINVAL:
- /* Cropping not supported. */
- break;
- default:
- /* Errors ignored. */
- break;
- }
- }
- } else {
- /* Errors ignored. */
- }
- CLEAR(fmt);
- fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
- if (force_format) {
- fmt.fmt.pix.width = ;
- fmt.fmt.pix.height = ;
- fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;
- fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
- printf("set %d*%d YUYV format\n", fmt.fmt.pix.width, fmt.fmt.pix.height);
- if (- == xioctl(fd, VIDIOC_S_FMT, &fmt))
- errno_exit("VIDIOC_S_FMT");
- /* Note VIDIOC_S_FMT may change width and height. */
- } else {
- /* Preserve original settings as set by v4l2-ctl for example */
- if (- == xioctl(fd, VIDIOC_G_FMT, &fmt))
- errno_exit("VIDIOC_G_FMT");
- }
- /* Buggy driver paranoia. */
- min = fmt.fmt.pix.width * ;
- if (fmt.fmt.pix.bytesperline < min)
- fmt.fmt.pix.bytesperline = min;
- min = fmt.fmt.pix.bytesperline * fmt.fmt.pix.height;
- if (fmt.fmt.pix.sizeimage < min)
- fmt.fmt.pix.sizeimage = min;
- switch (io) {
- case IO_METHOD_READ:
- init_read(fmt.fmt.pix.sizeimage);
- break;
- case IO_METHOD_MMAP:
- init_mmap();
- break;
- case IO_METHOD_USERPTR:
- init_userp(fmt.fmt.pix.sizeimage);
- break;
- }
- }
- /*
- * close (fd)
- */
- static void close_device(void)
- {
- if (- == close(fd))
- errno_exit("close");
- fd = -;
- }
- /* three operations
- * step 1 : check dev_name and st_mode
- * step 2 : open(device)
- */
- static void open_device(void)
- {
- struct stat st;
- if (- == stat(dev_name, &st)) {
- fprintf(stderr, "Cannot identify '%s': %d, %s\n",
- dev_name, errno, strerror(errno));
- exit(EXIT_FAILURE);
- }
- if (!S_ISCHR(st.st_mode)) {
- fprintf(stderr, "%s is no device\n", dev_name);
- exit(EXIT_FAILURE);
- }
- fd = open(dev_name, O_RDWR /* required */ | O_NONBLOCK, );
- if (- == fd) {
- fprintf(stderr, "Cannot open '%s': %d, %s\n",
- dev_name, errno, strerror(errno));
- exit(EXIT_FAILURE);
- }
- }
- static void usage(FILE *fp, int argc, char **argv)
- {
- fprintf(fp,
- "Usage: %s [options]\n\n"
- "Version 1.3\n"
- "Options:\n"
- "-d | --device name Video device name [%s]\n"
- "-h | --help Print this message\n"
- "-m | --mmap Use memory mapped buffers [default]\n"
- "-r | --read Use read() calls\n"
- "-u | --userp Use application allocated buffers\n"
- "-o | --output Outputs stream to stdout\n"
- "-f | --format Force format to 640x480 YUYV\n"
- "-c | --count Number of frames to grab [%i]\n"
- "",
- argv[], dev_name, frame_count);
- }
- static const char short_options[] = "d:hmruofc:";
- static const struct option
- long_options[] = {
- { "device", required_argument, NULL, 'd' },
- { "help", no_argument, NULL, 'h' },
- { "mmap", no_argument, NULL, 'm' },
- { "read", no_argument, NULL, 'r' },
- { "userp", no_argument, NULL, 'u' },
- { "output", no_argument, NULL, 'o' },
- { "format", no_argument, NULL, 'f' },
- { "count", required_argument, NULL, 'c' },
- { , , , }
- };
- int main(int argc, char **argv)
- {
- dev_name = "/dev/video0";
- for (;;) {
- int idx;
- int c;
- c = getopt_long(argc, argv,
- short_options, long_options, &idx);
- if (- == c)
- break;
- switch (c) {
- case : /* getopt_long() flag */
- break;
- case 'd':
- dev_name = optarg;
- break;
- case 'h':
- usage(stdout, argc, argv);
- exit(EXIT_SUCCESS);
- case 'm':
- io = IO_METHOD_MMAP;
- break;
- case 'r':
- io = IO_METHOD_READ;
- break;
- case 'u':
- io = IO_METHOD_USERPTR;
- break;
- case 'o':
- out_buf++;
- break;
- case 'f':
- force_format++;
- break;
- case 'c':
- errno = ;
- frame_count = strtol(optarg, NULL, );
- if (errno)
- errno_exit(optarg);
- break;
- default:
- usage(stderr, argc, argv);
- exit(EXIT_FAILURE);
- }
- }
- open_device();
- init_device();
- start_capturing();
- mainloop();
- stop_capturing();
- uninit_device();
- close_device();
- fprintf(stderr, "\n");
- return ;
- }
/ # ./a.out -f
set 640*480 YUYV format
buffers[0].length=614400
buffers[1].length=614400
buffers[2].length=614400
buffers[3].length=614400
....
/ # sz yuyv2.yuv
用图片查看器“RawImageViewer.exe” :(由于我的摄像头配置成扫码模式 所以是黑白图)

Linux V4L2之camera的更多相关文章
- 【Linux开发】Linux V4L2驱动架构解析与开发导引
Linux V4L2驱动架构解析与开发导引 Andrew按:众所周知,linux中可以采用灵活的多层次的驱动架构来对接口进行统一与抽象,最低层次的驱动总是直接面向硬件的,而最高层次的驱动在linux中 ...
- Linux v4l2编程(摄像头信息采集)
基于Linux3.4.2,自己做一点儿视频信息采集及网络传输的小实验,边做边学,一些基础知识同步整理..... 1. 定义 V4L2(Video For Linux Two) 是内核提供给应用程序访问 ...
- 【原创】Linux v4l2框架分析
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- 介绍 Android 的 Camera 框架
总体介绍 Android Camera 框架从整体上看是一个 client/service 的架构,有两个进程:一个是 client 进 程,可以看成是 AP 端,主要包括 JAVA 代码与一些 na ...
- v4l2驱动编写篇【转】
转自:http://blog.csdn.net/michaelcao1980/article/details/53008418 大部分所需的信息都在这里.作为一个驱动作者,当挖掘头文件的时候,你可能也 ...
- linux下驱动webcam
linux自带驱动只支持一些型号的camera,具体型号见http://www.ideasonboard.org/uvc/ 所以有些购买的webcam不能够在linux中被点亮,而且有些厂家只为了在W ...
- Linux Bootup Time
Linux Bootup Time 英文原文地址:http://elinux.org/Boot_Time 1. 简介 启动时间这一话题包括很多子话题,比如启动时间的衡量.启动时间的分析.人为因素分 ...
- DAVINCI DM6446 开发攻略——V4L2视频驱动和应用分析
针对DAVINCI DM6446平台,网络上也有很多网友写了V4L2的驱动,但只是解析Montavista linux-2.6.10 V4L2的原理.结构和函数,深度不够.本文决定把Montavis ...
- Linux 驱动开发
linux驱动开发总结(一) 基础性总结 1, linux驱动一般分为3大类: * 字符设备 * 块设备 * 网络设备 2, 开发环境构建: * 交叉工具链构建 * NFS和tftp服务器安装 3, ...
随机推荐
- Windows10 Ubuntu bash 配置 LAMP+JDK+Tomcat
Windows10的Bash省去了装ubuntu虚拟机的麻烦,而且可以直接用Windows下的浏览器去访问了,Exciting有没有,再也不用去忍受日常崩溃的chromium和慢慢的firefox了. ...
- Eeffective C++ 读书笔记( 32-38)
条款三十二:确定你的public继承塑模出is-a关系 1.所谓最佳设计,取决于系统希望做什么事,包括现在和未来. 2.好的接口可以防止无效的代码通过编译,因此你应该宁可采取“在编译期拒绝企鹅飞行”的 ...
- vue项目在移动端(手机)调试
查了很长一段时间的资料才搞好. 感悟就是:原来那么简单呐. 首要条件:同一局域网下(大致理解为链接相同的wifi) 1:命令行运行 ipconfig 2: 得到ipv4值, 用该值替换localhos ...
- 闲聊 “今日头条Go建千亿级微服务的实践”
背景 今天跟同事偶然看到<今日头条Go建千亿级微服务的实践>文章,故做了一些探讨,与大家分享下,也欢迎大家多多共同探讨!. 其他资料: 如何理解 Golang 中“不 ...
- java 引用数据类型(类)
我们可以把类的类型为两种: 第一种,Java为我们提供好的类,如Scanner类,Random类等,这些已存在的类中包含了很多的方法与属性,可供我们使用. 第二种,我们自己创建的类,按照类的定义标准, ...
- eclipse maven 构建简单springmvc项目
环境:eclipse Version: Oxygen.3a Release (4.7.3a) 创建maven Project项目,目录结构 修改工程的相关编译属性 修改pop.xml,引入spring ...
- 【转】搭建自己的 sentry 服务
1. 安装 docker 首先要确认你的 Ubuntu 版本是否符合安装 Docker 的前提条件.如果没有问题,你可以通过下边的方式来安装 Docker : 使用具有 sudo 权限的用户来登录你的 ...
- 基于支付系统真实场景的分布式事务解决方案效果演示: http://www.iqiyi.com/w_19rsveqlhh.html
基于支付系统真实场景的分布式事务解决方案效果演示:http://www.iqiyi.com/w_19rsveqlhh.html
- PAT1017:Queueing at Bank
1017. Queueing at Bank (25) 时间限制 400 ms 内存限制 65536 kB 代码长度限制 16000 B 判题程序 Standard 作者 CHEN, Yue Supp ...
- Java开发岗面试知识点解析
本文作者参加过多场面试,应聘岗位均为 Java 开发方向.在不断的面试中,分类总结了 Java 开发岗位面试中的一些知识点. 主要包括以下几个部分: Java 基础知识点 Java 常见集合 高并发编 ...