FreeRTOS例程开发
环境配置
- 下载官方源码 https://www.freertos.org/
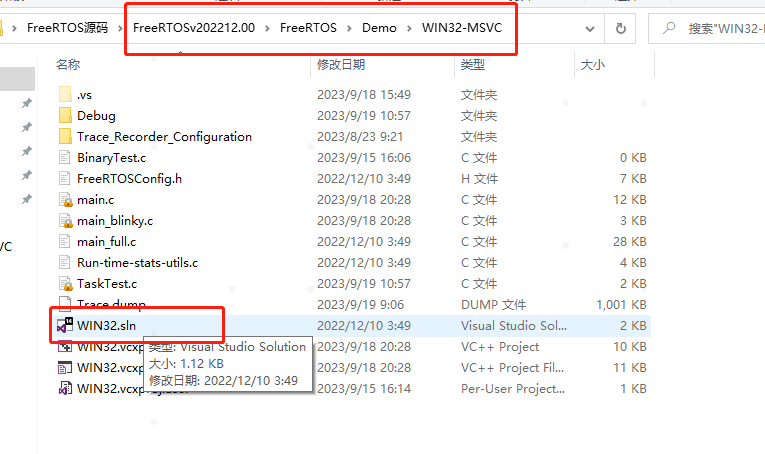
找到这个,他就是visual studio示例demo,我们主要在这个的基础上修改
- 下载visio studio
https://visualstudio.microsoft.com/zh-hans/
安装时不需要额外任何插件,打开项目会提示你安装c/c++,这样安的快
- 打开第一步圈的那个WIN32.sln
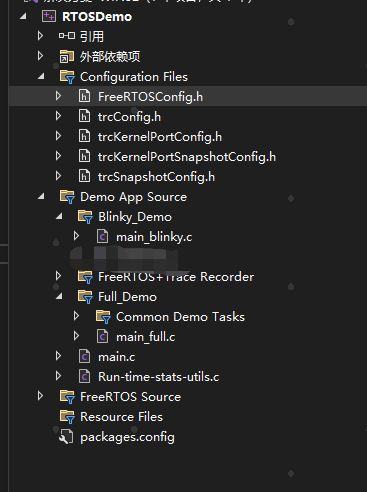
目录结构能看出,可以写多个demo,最后在main.c里调用即可,下面给出本人翻译过的官方示例Blinky示例
- 例程入门级详解
这个demo主要讲的是分别通过任务和定时器向队列收发信息,添加了个键盘按键重置定时器、保存log的功能
main.c
#include <stdio.h>#include <stdlib.h>#include <conio.h>#include <intrin.h>/* FreeRTOS kernel includes. */#include "FreeRTOS.h"#include "task.h"/* FreeRTOS+Trace includes. */#include "trcRecorder.h"#define mainREGION_1_SIZE 8201#define mainREGION_2_SIZE 23905#define mainREGION_3_SIZE 16807#define mainNO_KEY_PRESS_VALUE -1#define mainOUTPUT_TRACE_KEY 't'#define mainINTERRUPT_NUMBER_KEYBOARD 3//保存dump的文件名#define mainTRACE_FILE_NAME "Trace.dump"extern void main_blinky(void);extern void main_full(void);extern void main_Task(void);extern void vFullDemoTickHookFunction(void);extern void vFullDemoIdleFunction(void);//用于初始化 FreeRTOS 的堆内存管理器,通常不需要写,自动就调用了static void prvInitialiseHeap(void);//内存分配失败时调用,打印错误信息或重启系统等void vApplicationMallocFailedHook(void);//空闲任务运行时调用void vApplicationIdleHook(void);//堆栈溢出时调用,打印错误信息等void vApplicationStackOverflowHook(TaskHandle_t pxTask,char* pcTaskName);//Tick中断时调用,比如统计任务运行时间等void vApplicationTickHook(void);//创建空闲任务前调用,用于自定义分配内存void vApplicationGetIdleTaskMemory(StaticTask_t** ppxIdleTaskTCBBuffer,StackType_t** ppxIdleTaskStackBuffer,uint32_t* pulIdleTaskStackSize);//定时器任务前调用,自定义分配内存void vApplicationGetTimerTaskMemory(StaticTask_t** ppxTimerTaskTCBBuffer,StackType_t** ppxTimerTaskStackBuffer,uint32_t* pulTimerTaskStackSize);//停止后保存trace文件static void prvSaveTraceFile(void);//创建一个 Windows 线程来处理键盘输入static DWORD WINAPI prvWindowsKeyboardInputThread(void* pvParam);//接收键盘输入时的中断处理程序。static uint32_t prvKeyboardInterruptHandler(void);//blinky的中断程序extern void vBlinkyKeyboardInterruptHandler(int xKeyPressed);/*-----------------------------------------------------------*///configSUPPORT_STATIC_ALLOCATION = 1 可以通过回调函数来手动分配内存给空闲任务和定时器任务,简单来说就是用于测试demoStackType_t uxTimerTaskStack[configTIMER_TASK_STACK_DEPTH];//获取键盘输入的线程 的句柄static HANDLE xWindowsKeyboardInputThreadHandle = NULL;//存储最后一个未被处理的按键,空闲时处理static int xKeyPressed = mainNO_KEY_PRESS_VALUE;/*-----------------------------------------------------------*/int main(void){//初始化堆内存管理器prvInitialiseHeap();//初始化Tracer,可选择不用TracerconfigASSERT(xTraceInitialize() == TRC_SUCCESS);//开启Tracer,configASSERT()调用了,就会保存Tracerprintf("The trace will be dumped to the file \"%s\" whenever a call to configASSERT()\r\n""fails or the \'%c\' key is pressed.\r\n",mainTRACE_FILE_NAME, mainOUTPUT_TRACE_KEY);configASSERT(xTraceEnable(TRC_START) == TRC_SUCCESS);//设置键盘输入的中断处理程序。vPortSetInterruptHandler(mainINTERRUPT_NUMBER_KEYBOARD, prvKeyboardInterruptHandler);// 开处理键盘中断的线程xWindowsKeyboardInputThreadHandle = CreateThread(NULL, //指向线程安全属性0, //初始化线程堆栈大小,字节为单位prvWindowsKeyboardInputThread, //线程函数指针NULL, // 新线程参数0, // 标志NULL);//将未被 FreeRTOS 任务使用的核心分配给 Windows 线程SetThreadAffinityMask(xWindowsKeyboardInputThreadHandle, ~0x01u);main_Task();return 0;}/*-----------------------------------------------------------*/void vApplicationMallocFailedHook(void){// configUSE_MALLOC_FAILED_HOOK = 1 开启钩子函数 作用是内存分配pvPortMalloc失败进行错误处理vAssertCalled(__LINE__, __FILE__);}/*-----------------------------------------------------------*/void vApplicationIdleHook(void){}/*-----------------------------------------------------------*/void vApplicationStackOverflowHook(TaskHandle_t pxTask,char* pcTaskName){(void)pcTaskName;(void)pxTask;//将configCHECK_FOR_STACK_OVERFLOW定义为1或2,则会执行运行时堆栈溢出检查。如果检测到堆栈溢出,将调用此钩子函数vAssertCalled(__LINE__, __FILE__);}/*-----------------------------------------------------------*/void vApplicationTickHook(void){//将configUSE_TICK_HOOK设置为1,则每次tick中断都会调用此函数。可以在此处自定义代码,注意不要阻塞}/*-----------------------------------------------------------*/void vApplicationDaemonTaskStartupHook(void){//仅在守护任务开始执行时调用一次的钩子函数(有时称为定时器任务)}/*-----------------------------------------------------------*/void vAssertCalled(unsigned long ulLine,const char* const pcFileName){static BaseType_t xPrinted = pdFALSE;volatile uint32_t ulSetToNonZeroInDebuggerToContinue = 0;// configASSERT() 断言失败调用(void)ulLine;(void)pcFileName;taskENTER_CRITICAL();{printf("ASSERT! Line %ld, file %s, GetLastError() %ld\r\n", ulLine, pcFileName, GetLastError());//停止跟踪记录并保存跟踪(void)xTraceDisable();prvSaveTraceFile();//如果正在调试,则会导致调试器断点__debugbreak();//将ulSetToNonZeroInDebuggerToContinue设置为一个非零值,//可以使程序在断言失败时暂停执行,以便使用调试器来查看当前的程序状态和变量值,定位和解决问题。while (ulSetToNonZeroInDebuggerToContinue == 0){__asm {NOP};__asm {NOP};}// 重启Tracer记录(void)xTraceEnable(TRC_START);}taskEXIT_CRITICAL();}/*-----------------------------------------------------------*/static void prvSaveTraceFile(void){FILE* pxOutputFile;fopen_s(&pxOutputFile, mainTRACE_FILE_NAME, "wb");if (pxOutputFile != NULL){fwrite(RecorderDataPtr, sizeof(RecorderDataType), 1, pxOutputFile);fclose(pxOutputFile);printf("\r\nTrace output saved to %s\r\n\r\n", mainTRACE_FILE_NAME);}else{printf("\r\nFailed to create trace dump file\r\n\r\n");}}/*-----------------------------------------------------------*/static void prvInitialiseHeap(void){//heap_5是一个具有灵活性和可配置性的堆实现,//为了简化示例,我们创建了一个大的数组,并在数组中使用偏移量来确定每个堆区域的位置。//这些堆区域之间有间隔和杂乱的对齐,这样做是为了模拟实际场景中可能出现的情况。通过使用这些堆区域,我们可以测试和验证堆的分配和释放操作。static uint8_t ucHeap[configTOTAL_HEAP_SIZE];volatile uint32_t ulAdditionalOffset = 19; /* Just to prevent 'condition is always true' warnings in configASSERT(). */const HeapRegion_t xHeapRegions[] ={//具有伪偏移量的起始地址{ ucHeap + 1, mainREGION_1_SIZE },{ ucHeap + 15 + mainREGION_1_SIZE, mainREGION_2_SIZE },{ ucHeap + 19 + mainREGION_1_SIZE + mainREGION_2_SIZE, mainREGION_3_SIZE },{ NULL, 0 }};// 检查定义的尺寸和偏移是否实际适合configASSERT((ulAdditionalOffset + mainREGION_1_SIZE + mainREGION_2_SIZE + mainREGION_3_SIZE) < configTOTAL_HEAP_SIZE);// 未定义configASSERT()时阻止编译器警告(void)ulAdditionalOffset;vPortDefineHeapRegions(xHeapRegions);}/*-----------------------------------------------------------*/// configUSE_STATIC_ALLOCATION = 1, 必须提供vApplicationGetIdleTaskMemory()的实现void vApplicationGetIdleTaskMemory(StaticTask_t** ppxIdleTaskTCBBuffer,StackType_t** ppxIdleTaskStackBuffer,uint32_t* pulIdleTaskStackSize){//如果在空闲任务函数中声明的缓冲区变量没有被声明为静态变量,而是被分配在栈上,//那么在该函数退出后,栈上的变量会被释放,因此这些缓冲区变量将不再存在,可能会导致错误。static StaticTask_t xIdleTaskTCB;static StackType_t uxIdleTaskStack[configMINIMAL_STACK_SIZE];//该函数会返回一个指向静态任务结构体(StaticTask_t)的指针,该结构体将用于存储空闲任务(Idle task)的状态。*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;//该函数会返回一个数组,这个数组将作为空闲任务(Idle task)的栈使用。*ppxIdleTaskStackBuffer = uxIdleTaskStack;//空闲任务栈的大小是通过指针*ppxIdleTaskStackBuffer所指向的数组来确定的。这个数组的类型是StackType_t类型。//这个数组的大小是以StackType_t类型的单词为单位来指定的,而不是以字节为单位。//configMINIMAL_STACK_SIZE宏定义,它是指栈中最小的可接受空间大小,以确保任务能够正常运行。*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;}/*-----------------------------------------------------------*/// configUSE_STATIC_ALLOCATION = 1 静态分配任务内存// configUSE_TIMERS are both set to 1, 开启定时器//必须要实现 vApplicationGetTimerTaskMemory() 这个函数功能是为定时器任务分配内存void vApplicationGetTimerTaskMemory(StaticTask_t** ppxTimerTaskTCBBuffer,StackType_t** ppxTimerTaskStackBuffer,uint32_t* pulTimerTaskStackSize){// 如果在vApplicationGetTimerTaskMemory()函数内声明提供给Timer任务的缓冲区,则必须将它们声明为静态变量static StaticTask_t xTimerTaskTCB;//传递一个指向StaticTask_t结构的指针,其中Timer任务的状态将被存储*ppxTimerTaskTCBBuffer = &xTimerTaskTCB;// 传递将用作Timer任务堆栈的数组*ppxTimerTaskStackBuffer = uxTimerTaskStack;//传递指向*ppxTimerTaskStackBuffer的数组大小。由于数组必须是StackType_t类型,因此configMINIMAL_STACK_SIZE 单位是字而不是字节*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;}/*-----------------------------------------------------------*///接收键盘输入时的中断处理程序。static uint32_t prvKeyboardInterruptHandler(void){/* 处理键盘输入 */switch (xKeyPressed){case mainNO_KEY_PRESS_VALUE:break;case mainOUTPUT_TRACE_KEY://通过进入临界区,可以防止在FreeRTOS模拟器内部调用Windows系统调用时发生死锁或错误。这样可以确保保存跟踪文件的操作能够顺利进行portENTER_CRITICAL();{(void)xTraceDisable();prvSaveTraceFile();(void)xTraceEnable(TRC_START);}portEXIT_CRITICAL();break;default:/* 调用中断处理程序. */vBlinkyKeyboardInterruptHandler(xKeyPressed);break;}//此中断不需要上下文切换,因此返回pdFALSEreturn pdFALSE;}/*-----------------------------------------------------------*///从Windows线程函数捕获键盘输入并使用整数将其传递到FreeRTOS模拟器static DWORD WINAPI prvWindowsKeyboardInputThread(void* pvParam){(void)pvParam;for (; ; ){// 阻塞并等待键盘输入.xKeyPressed = _getch();//通知FreeRTOS模拟器存在键盘中断。这将触发prvKeyboardInterruptHandlervPortGenerateSimulatedInterrupt(mainINTERRUPT_NUMBER_KEYBOARD);}//不应该到达这里,所以返回负退出状态return -1;}/*-----------------------------------------------------------*/// 跟踪记录器使用以下代码进行计时static uint32_t ulEntryTime = 0;void vTraceTimerReset(void){ulEntryTime = xTaskGetTickCount();}uint32_t uiTraceTimerGetFrequency(void){return configTICK_RATE_HZ;}uint32_t uiTraceTimerGetValue(void){return(xTaskGetTickCount() - ulEntryTime);}
Blink.c
/* Standard includes. */#include <stdio.h>#include <conio.h>/* Kernel includes. */#include "FreeRTOS.h"#include "task.h"#include "timers.h"#include "semphr.h"// 任务优先级#define mainQUEUE_RECEIVE_TASK_PRIORITY ( tskIDLE_PRIORITY + 2 )#define mainQUEUE_SEND_TASK_PRIORITY ( tskIDLE_PRIORITY + 1 )// 发送频率/ms#define mainTASK_SEND_FREQUENCY_MS pdMS_TO_TICKS( 200UL )#define mainTIMER_SEND_FREQUENCY_MS pdMS_TO_TICKS( 2000UL )// 队列最大长度#define mainQUEUE_LENGTH ( 2 )// 任务/定时器发送给队列的数据#define mainVALUE_SENT_FROM_TASK ( 100UL )#define mainVALUE_SENT_FROM_TIMER ( 200UL )// 键盘输入#define mainNO_KEY_PRESS_VALUE ( -1 )#define mainRESET_TIMER_KEY ( 'r' )/*-----------------------------------------------------------*/// 任务句柄,分别是向队列收发的任务static void prvQueueReceiveTask( void *pvParameters );static void prvQueueSendTask( void *pvParameters );// 定时器的回调函数static void prvQueueSendTimerCallback( TimerHandle_t xTimerHandle );/*-----------------------------------------------------------*/// 队列句柄static QueueHandle_t xQueue = NULL;// 定时器句柄static TimerHandle_t xTimer = NULL;/*-----------------------------------------------------------*/void main_blinky( void ){const TickType_t xTimerPeriod = mainTIMER_SEND_FREQUENCY_MS;printf( "\r\nStarting the blinky demo. Press \'%c\' to reset the software timer used in this demo.\r\n\r\n", mainRESET_TIMER_KEY );// 创建队列xQueue = xQueueCreate( mainQUEUE_LENGTH, sizeof( uint32_t ) );if( xQueue != NULL ){// 创建任务xTaskCreate( prvQueueReceiveTask, /* The function that implements the task. */"Rx", /* The text name assigned to the task - for debug only as it is not used by the kernel. */configMINIMAL_STACK_SIZE, /* The size of the stack to allocate to the task. */NULL, /* The parameter passed to the task - not used in this simple case. */mainQUEUE_RECEIVE_TASK_PRIORITY,/* The priority assigned to the task. */NULL ); /* The task handle is not required, so NULL is passed. */xTaskCreate( prvQueueSendTask, "TX", configMINIMAL_STACK_SIZE, NULL, mainQUEUE_SEND_TASK_PRIORITY, NULL );// 创建定时器xTimer = xTimerCreate( "Timer", /* The text name assigned to the software timer - for debug only as it is not used by the kernel. */xTimerPeriod, /* The period of the software timer in ticks. */pdTRUE, /* xAutoReload is set to pdTRUE, so this timer goes off periodically with a period of xTimerPeriod ticks. */NULL, /* The timer's ID is not used. */prvQueueSendTimerCallback );/* The function executed when the timer expires. *///启动定时器xTimerStart( xTimer, 0 );// 开启调度器vTaskStartScheduler();}for( ;; );}/*-----------------------------------------------------------*/static void prvQueueSendTask( void *pvParameters ){TickType_t xNextWakeTime;const TickType_t xBlockTime = mainTASK_SEND_FREQUENCY_MS;const uint32_t ulValueToSend = mainVALUE_SENT_FROM_TASK;// 防警告“入参没用到”的,实际上没用( void ) pvParameters;// 初始化为当前的tick数xNextWakeTime = xTaskGetTickCount();for( ;; ){// 延时Block次,然后next会更新为 next + blockvTaskDelayUntil( &xNextWakeTime, xBlockTime );// 向队列发送数据,数据为100ULxQueueSend( xQueue, &ulValueToSend, 0U );}}/*-----------------------------------------------------------*/static void prvQueueSendTimerCallback( TimerHandle_t xTimerHandle ){const uint32_t ulValueToSend = mainVALUE_SENT_FROM_TIMER;( void ) xTimerHandle;// 只有定时器到期(设置为2s)才会执行的回调函数,也会向队列发送数据,数据为200ULxQueueSend( xQueue, &ulValueToSend, 0U );}/*-----------------------------------------------------------*/static void prvQueueReceiveTask( void *pvParameters ){uint32_t ulReceivedValue;( void ) pvParameters;for( ;; ){// 从队列收数据,队列长度为2xQueueReceive( xQueue, &ulReceivedValue, portMAX_DELAY );//进入临界区,确保printf可以执行完毕,因为printf消耗很多堆栈资源taskENTER_CRITICAL();{if (ulReceivedValue == mainVALUE_SENT_FROM_TASK){printf("Message received from task - idle time %llu%%\r\n", ulTaskGetIdleRunTimePercent());}else if (ulReceivedValue == mainVALUE_SENT_FROM_TIMER){printf("Message received from software timer\r\n");}else{printf("Unexpected message\r\n");}}taskEXIT_CRITICAL();}}/*-----------------------------------------------------------*//* 被它调用:prvKeyboardInterruptSimulatorTask(),定义在 main.c. */void vBlinkyKeyboardInterruptHandler( int xKeyPressed ){// 处理输入switch ( xKeyPressed ){case mainRESET_TIMER_KEY:if ( xTimer != NULL ){//进入临界区,只允许printf这一个线程,防止死锁taskENTER_CRITICAL();{printf("\r\nResetting software timer.\r\n\r\n");}taskEXIT_CRITICAL();// 重置定时器xTimerReset( xTimer, portMAX_DELAY );}break;default:break;}}
要新加demo的时候,需要新建一个c文件,在main.c中extern进去,然后再main函数中调用
再次复习官方文档
Assert断言函数
建议在main函数中添加,用于在开发过程中进行断言检查。通过在代码中使用断言,我们可以在开发和调试过程中快速发现和定位潜在的问题。
演示demo中定义在了FreeRTOSconfig.h中
#define configASSERT( x ) if( ( x ) == 0 ) vAssertCalled( __LINE__, __FILE__ )
断言函数定义位于main.c
void vAssertCalled(unsigned long ulLine,const char* const pcFileName){static BaseType_t xPrinted = pdFALSE;volatile uint32_t ulSetToNonZeroInDebuggerToContinue = 0;// configASSERT() 断言失败调用(void)ulLine;(void)pcFileName;taskENTER_CRITICAL();{printf("ASSERT! Line %ld, file %s, GetLastError() %ld\r\n", ulLine, pcFileName, GetLastError());//停止跟踪记录并保存跟踪(void)xTraceDisable();prvSaveTraceFile();//如果正在调试,则会导致调试器断点__debugbreak();//将ulSetToNonZeroInDebuggerToContinue设置为一个非零值,//可以使程序在断言失败时暂停执行,以便使用调试器来查看当前的程序状态和变量值,定位和解决问题。while (ulSetToNonZeroInDebuggerToContinue == 0){__asm {NOP};__asm {NOP};}// 重启Tracer记录(void)xTraceEnable(TRC_START);}taskEXIT_CRITICAL();}
如果 x 表达式的结果为假(即为0),则会调用函数 vAssertCalled,并传递当前代码所在的行号和文件名作为参数。这样可以方便地在断言失败时跟踪和记录相关信息,以便进行调试和排查问题。
从未完全禁用中断,即使是临界区
在 FreeRTOS 中,任务调度器是通过中断来触发的。当发生一个中断时,任务调度器会暂停当前任务,并根据优先级切换到下一个任务。在某些情况下,为了确保关键代码的原子性或实时性(原子性指的是,要不就运行完 要不就干脆不运行),可能需要完全禁用中断。但是在移植 FreeRTOS 时,出于特定的需求或硬件限制,选择不完全禁用中断。
任务函数示例
推荐事件驱动型,记得删除
void vATaskFunction( void *pvParameters ){for( ;; ){if( WaitForEvent( EventObject, TimeOut ) == pdPASS ){-- Handle event here. --}else{-- Clear errors, or take actions here. --}}/* As per the first code listing above. */vTaskDelete( NULL );}
创建任务的宏控
void vTask( void *pvParameters );
可以写成
portTASK_FUNCTION_PROTO( vTask, pvParameters );
队列的几个特点
消息通过队列以副本的方式发送, 这意味着数据本身被复制到队列中, 而不是队列始终只存储对数据的引用
使用按副本传递数据的队列不会阻止队列用于按引用传递数据,如果消息太大,也可以开一个队列存指针
任务通知
任务创建自带任务通知数组:用于存储一个状态(挂起或非挂起)和一个32位的通知值。在数组中,每个索引对应一条任务通知
configTASK_NOTIFICATION_ARRAY_ENTRIES默认为1,表示通知数组长度,也就是最多有几条通知
向任务发送直达任务通知时,可以通过覆盖原值、仅在接收任务已读取值时才覆盖原值、设置位操作或进行增量操作来更新通知值
限制
- 在发送任务通知之前,必须确保只有一个任务会接收这个事件
FreeRTOS例程开发的更多相关文章
- FreeRTOS - 程序开发阶段建议
1.创建任务.定时器等都需要耗用分配给FreeRTOS的heap,由于RAM有限,分配作为FreeRTOS的heap量有限,一不小心就不够用了,所以应该有检测任务.定时器等是否创建成功,如下图: 2. ...
- cube+FreeRTOS联合开发采坑笔记
加了看门狗之后不断重启的可能 原因: 任务容量分配不足,在"FreeRTOSConfig.h"的配置中,有个configTOTAL_HEAP_SIZE中将堆大小调到最大.
- CrazyBingo mini VIP 2.0 视频开发板 NIOS移植例程(原创)
创建一个NIOS环境 注意事项 前言:(先了解下硬件) 本板卡目前主要适合以下几类人: (1)对FPGA 逻辑开发有强烈的兴趣,并且有一定的HDL基础 (2)计划采用FPGA图像架构,学习并研究图像算 ...
- VOFM 例程
SAP ERP 实施中,经常会用到例程开发(TCODE:VOFM).这个开发目前我用到的是影响SD和MM的定价过程.创建例程需要ACCESS KEY,这个可以通过申请得到,创建后例程会被包含在一个RE ...
- wumei-smart智能家居开原项目
一.项目简介 物美智能(wumei-smart)]是一套开源的软硬件系统,可用于二次开发和学习,快速搭建自己的智能家居系统. 硬件工程师可以把自己的设备集成到系统:软件工程师可以使用项目中的设备熟悉软 ...
- 【RTOS】基于V7开发板的RTX5和FreeRTOS带CMSIS-RTOS V2封装层的模板例程下载,AC6和AC5两个版本
说明: 1.使用MDK的RTE环境开发RTX5和FreeRTOS,简单易移植,统一采用CMSIS-RTOS V2封装层. 2.DTCM是H7里面性能最高的RAM,主频400MHz,跟内核速度一样,所以 ...
- 【RTOS】基于V7开发板的uCOS-III,uCOS-II,RTX4,RTX5,FreeRTOS原版和带CMSIS-RTOS V2封装层版全部集齐
RTOS模板制作好后,后面堆各种中间件就方便了. 1.基于V7开发板的最新版uCOS-II V2.92.16程序模板,含MDK和IAR,支持uC/Probe https://www.cnblogs.c ...
- 【iCore双核心组合是开发板例程】【12个 verilog 中级实验例程发布】
_____________________________________ 深入交流QQ群: A: 204255896(1000人超级群,可加入) B: 165201798(500人超级群,满员) C ...
- Android应用---基于NDK的samples例程hello-jni学习NDK开发
Android应用---基于NDK的samples例程hello-jni学习NDK开发 NDK下载地址:http://developer.android.com/tools/sdk/ndk/index ...
- 迅为iTOP-4418/6818开发板-驱动-IO初始化配置介绍和例程
对于所有的处理器,pad 一般可以分为两大类:IO(输入输出).Power(VDD 和GDD).类似摄像头 IO.以太网 IO.PWM 的 IO 等等,都可以统称为 IO.一个 IO,有可能能够被配置 ...
随机推荐
- Thinkphp5.x全漏洞复现分析
基础知识 命名空间和子命名空间 我们可以把namespace理解为一个单独的空间,事实上它也就是一个空间而已,子命名空间那就是空间里再划分几个小空间,举个例子: <?php namespace ...
- sql多表分页查询【oracle】
sql多表查询[oracle] 做个记录,好歹是写出来了,使用左连接的方法,进行四表查询,且使用rownum进行分页 把涉及内容的全部替换了,不过应该都看得懂,就不说了 select * from ( ...
- 力扣412(java)-Fizz Buzz(简单)
题目: 给你一个整数 n ,找出从 1 到 n 各个整数的 Fizz Buzz 表示,并用字符串数组 answer(下标从 1 开始)返回结果,其中: answer[i] == "FizzB ...
- HarmonyOS NEXT应用开发案例——行程地址交换动画
介绍 本示例介绍使用显式动画 animateTo 实现左右地址交换动画.该场景多用于机票.火车票购买等出行类订票软件中. 效果预览图 使用说明 加载完成后显示地址交换动画页面,点击中间的图标,左右两边 ...
- Apsara Stack 同行者专刊 | 政企混合云技术架构的演进和发展
简介: 现在,政企客户已进入到用云计算全面替换传统IT基础架构的攻坚阶段,混合云与传统架构的技术产品能力也正在经历全面的比较与评估.阿里云混合云平台首席架构师张晓丹分享IT架构技术深刻洞察,并对政企混 ...
- Go Mysql Driver 集成 Seata-Golang 解决分布式事务问题
简介: 2020 年 4 月,我们开始尝试实现 go 语言的分布式事务框架 Seata-Golang.众所周知,Seata AT 模式以无业务代码侵入的特点,被广大开发者推崇.Java 版 Seata ...
- ClickHouse Keeper 源码解析
简介:ClickHouse 社区在21.8版本中引入了 ClickHouse Keeper.ClickHouse Keeper 是完全兼容 Zookeeper 协议的分布式协调服务.本文对开源版本 C ...
- 6.prometheus监控--监控redis/rabbitmq/mongodb
1.监控redis 1.1 redis_exporter安装方式 1.1.1 二进制源码安装方式 参考nginx二进制安装方法 redis_exporter下载地址:https://github.co ...
- Linux中典型的文件权限问题
总结起来说,可以打个比方,目录就像一间上了锁有窗户的屋子.如果你只想看屋子里面有啥,那么只要拥有r权限,不必进入到屋子,透过屋子的窗户就能看到里面的东西:但是如果你想改变屋子里面的物件,或者从屋子里面 ...
- C语言:快速排序(详解)
快速排序采用的是两头对比交换 http://t.csdn.cn/TXcAK 上面这个连接大家可以点进去看看博客李小白大大的图文解释,我觉得这个是对我启发比较大的,对刚接触快速排序的人来说非常友好,很快 ...