相机标定 matlab opencv ROS三种方法标定步骤(1)
一 、 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解
计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表
示各个坐标系下的转换,首先在图像坐标系下与相机坐标系的关系
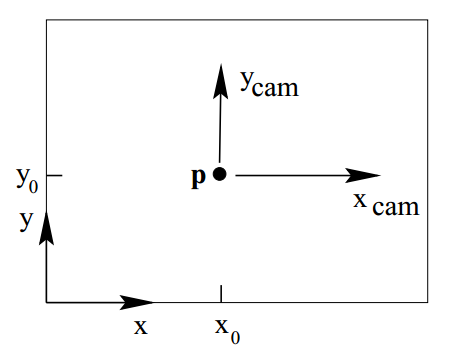
可得出 Xcam=x/dx+x0, Ycam=y/dy+y0 表示为矩阵形式
Xcam 1/dx 0 x0 x
Ycam = 0 1/dy y0 * y
1 0 0 1 1
相机坐标系与图像坐标系的关系是
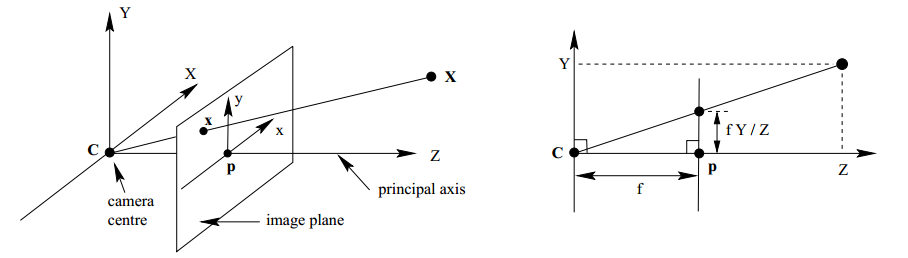
既有 可以写成
可以写成 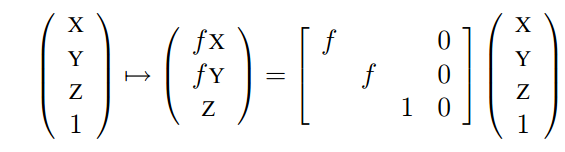
我们知道相机坐标系与世界坐标系的关系是
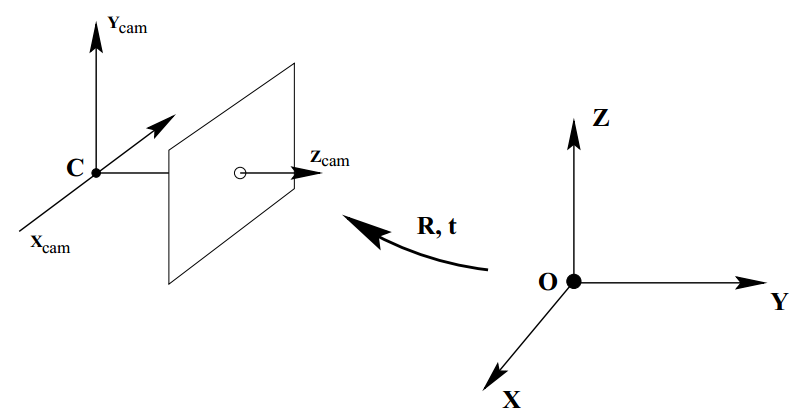 表达成矩阵表示为
表达成矩阵表示为
 可以推导出
可以推导出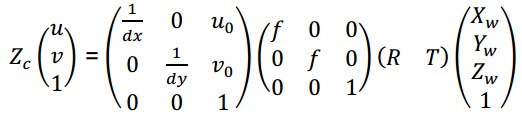
(这里面的Xc ,Yc,Zc 也就是上面的X Y Z )其中
K= 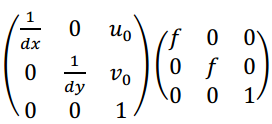 就为相机的内参 R T 为相机的外参(好难编辑)
就为相机的内参 R T 为相机的外参(好难编辑)
接下来就是说明一下使用MATLAB Opencv ,以及ROS环境下的Opencv进行相机校准
相机的标定主要有两种方法 :摄像头标定方法和摄像头自标定方法,典型的有:(1)Tsai(传统的标定方法) (2)张正友(介于传统与自标定方法之间)张正友标定法由于很简单
所以得到广泛 的应用,张正友标定法的步骤:
1、打印一张模板并贴在一个平面上;
2、从不同角度拍摄若干张模板图像;
3、检测出图像中的特征点;
4、求出摄像机的外参数(单应性矩阵)和内参数(最大似然估计) ;
5、求出畸变系数;
6、优化求精。
二、对于在matlab中进行相机标定是一件非常简单的事,因为在matlab官方网站,以及matlab中文论坛上都是有教程的,只需要找到标定模板就可以了,
matlab中文论坛的学习网址 http://www.ilovematlab.cn/thread-267670-1-1.html
详细相机标定过程请参考 http://www.mathworks.com/help/vi ... ator.html#btxr8c_-2
MATLAB相机标定教学视频 http://www.mathworks.com/videos/ ... h-matlab-81233.html
2.1 首先我们得准备软件matlab,安装matlab就按照网上的教程既可以安装成功了,不过安装过程可能遇到一些软件破解的一些问题,如果安装不上,
那就果断的换安装的软件版本, 其次就是准备标定魔板,我是直 接用A3的纸打印了标准的棋盘方格,自己百度一下标定棋盘网上有很多图纸可供下载,
http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration?action=AttachFile&do=view&target=check-108.pdf
我使用的就是check-108,其中108代表的是每个小方格的边长为108mm,使用A3的纸张打印,后来测量一下每个黑白方格的边长为35mm,
2.2 材料和软件都准备好了,我们在准备摄像头,我们有四个选择:(1)手机拍照 我们就标定手机的摄像头,(2)笔记本自带的摄像头,(3)使用带USB的的摄像头(4)网上提供的模板
2.2.1 手机摄像头标定,最好的方法是将手机固定,然后移动标定模板,改变模板的远近位置,以及翻转角度等等,如下图
这里面是我把标定模板给固定,改变手机的位置,这就导致拍出来的照骗有些事不能用的(可以试试),就会明白为什么会不能进行标定了,
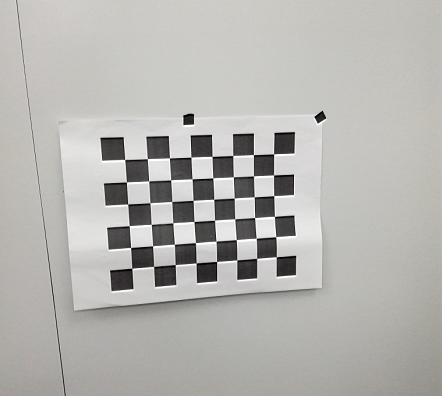
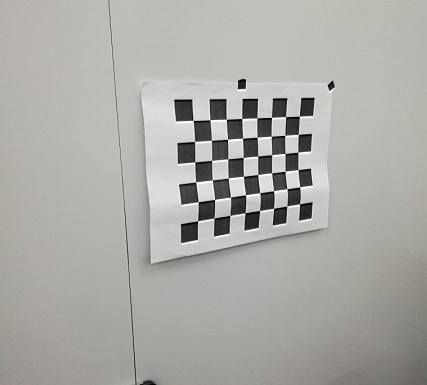
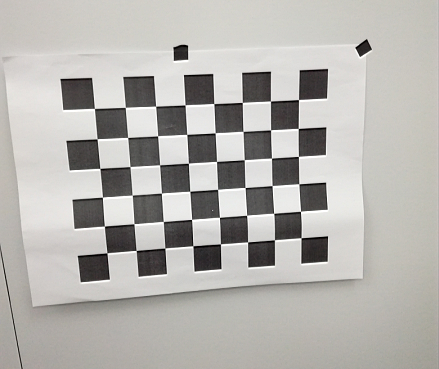
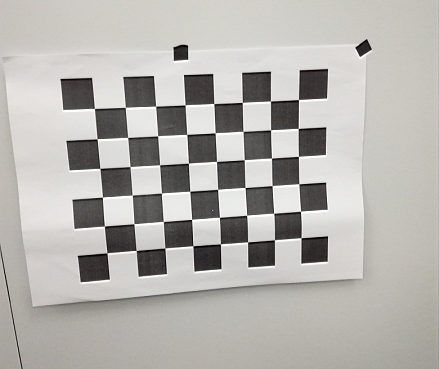
这只是展示其中四张照片,当然拍下来的至少要20张不一样的照片,现在开始使用MATLAB进行标定了,
2.2.2当我们想标定笔记本的摄像头或者我自己外界一个摄像头的时候,就需要使用一个软件去获取摄像头的照骗,使用 Ecap软件就可以打开摄像头,并且捕捉照骗
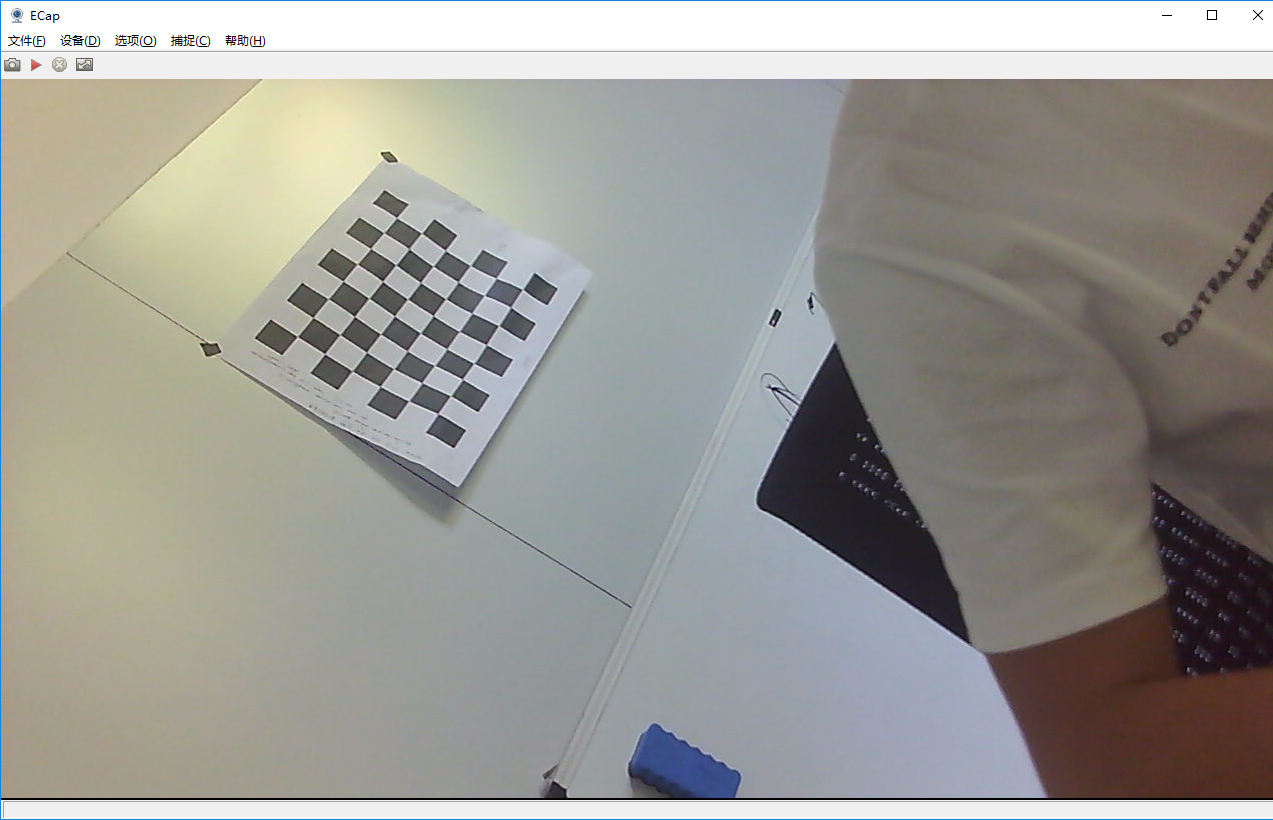
可以捕获很多不同角度的关于标定模板的图片,至少需要20张,紧接着打开matlab,在命令行输入
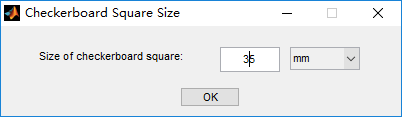
>> cameraCalibrator 出现:

之后可以添加“add images”,然后选择我的模板的方格大小,默认是25mm 改为与实际模板一致的边长是35mm
也可以直接添加网上所提供的标定模板,

添加完选择“”calibrate“”有
右边出现一下统计图,左下角就是每个图片相对摄像头的远近和角度,点击保存calibration.mat文件,点击“Export camera parameters”出现标定的结果
到此MATLAB的相机标定就完成了
(虽然我写的很幸苦,但是我也只是想记录下我的实验过程,中间也遇到很多问题,这都是解决后的结果本来是1,2,3放在一起的
但是因为篇幅太长,只好将其分为三段,中间也丢失过好几次,然后又重新写,大神们看见就当是在看笑话,一笑了之即可,
我知道这其中没有什么创新可言,真实惭愧,谢谢)
相机标定 matlab opencv ROS三种方法标定步骤(1)的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了<计算机视觉中的多视图几何>以及 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- matlab多行注释的三种方法
转自:http://icictech.blog.163.com/blog/static/2797425420084595725499/ 1)方法一 选中你要加注释的内容,然后选择工具菜单"t ...
- 用matlab脚本语言写M文件函数时用三种方法简单实现实现DFT(离散傅里叶变换)
%用二重循环实现DFT: function xk=dt_0(xn); %define a function N=length(xn); %caculate the length of the vari ...
- Matlab中数组元素引用——三种方法
Matlab中数组元素引用——三种方法 1.Matlab中数组元素引用有三种方法 1 2 3 1.下标法(subscripts) 2.索引法(index) 3.布尔法(Boolean) 注意:在使 ...
- MATLAB中多行注释的三种方法
MATLAB中多行注释的三种方法 A. %{ 若干语句 %} B. 多行注释: 选中要注释的若干语句, 编辑器菜单Text->Comment, 或者快捷键Ctrl+R 取消注释: 选中要取消注释 ...
- opencv 3.1.0 访问像素值的三种方法(C++)
三种方法分别问: 指针访问:void colorReduce_ptr(cv::Mat &inputImage, cv::Mat &outputImage, int div); 迭代器访 ...
- opencv图像阈值设置的三种方法
1.简单阈值设置 像素值高于阈值时,给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色).这个函数就是 cv2.threshhold().这个函数的第一个参数就是原图像 ...
- 【Android】Eclipse自动编译NDK/JNI的三种方法
[Android]Eclipse自动编译NDK/JNI的三种方法 SkySeraph Sep. 18th 2014 Email:skyseraph00@163.com 更多精彩请直接访问SkySer ...
随机推荐
- java 读取图片色深
问题: 想写一个小程序可读取图片的色深(bit-depth).网上有一些软件可完成这个功能,但是我想把程序做成一个可移植的插件. 本想用c写的,但实在麻烦,最后选择java,与很多方法不用自己写,速度 ...
- 长度为n的数组,有一个数重复出现了n/2+1次,找出(三种方法)
问题: 长度为n的数组,有一个数重复出现了n/2+1次,找出这个数: 解决: 比较直接的思路是遍历每个元素,让其与剩下其他元素比较,相等一次计数器sum++,直到sum=n/2+1为止: #inc ...
- 软件Scrum
软件海贼团 OnePiece (版权所有) 最近迷上了“海贼王”这部动画片,不仅仅是因为其中的人物个个性格鲜明,剧情跌宕起伏扣人心弦,各种耍宝搞笑,还感觉到这个团队很像理想中的敏捷软件团队. 作为一直 ...
- 创建naarray(1)
创建ndarray Numpy创建ndarray的方法比较够用,几乎也就是矩阵运算的常用的方法. 约定: import numpy as np 常用的创建ndarray的函数有:np.array, n ...
- [解决]Windows Server 2012 不能安装IE版的Flash
1.问题描述 在server 2012下安装IE版的Flash提示包含最新版本 2.解决方法 2.1.开启“桌面体验”功能 2.2.关闭“IE增强的安全配置”功能 3.重启计算机后安装Flash
- [修]python普通继承方式和super继承方式
[转]python普通继承方式和super继承方式 原文出自:http://www.360doc.com/content/13/0306/15/9934052_269664772.shtml 原文的错 ...
- Winform常用开发模式第一篇
Winform常用开发模式第一篇 上一篇博客最后我提到“异步编程模型”(APM),之后本来打算整理一下这方面的材料然后总结一下写篇文章与诸位分享,后来在整理的过程中不断的延伸不断地扩展,发现完全偏离了 ...
- 弃用个人博客站重返CSDN缘由
最近悄然关闭了自己的个人博客小站,重新返回了CSDN写博客.恰逢周末,闲暇尚有,敲击键盘记录一下. 其实最初关闭个人基于SAE的个人博客站是一周前开始的,想想自己的博客已经有两周年多的时间了,刚刚创建 ...
- [Thinkbayes]贝叶斯思维读书笔记-1-贝叶斯定理
使用贝叶斯定理,目前来看最重要的一点在于假设.就是未知事件已知化,同时也要注意假设的全程性,不能从中开始新的假设,这种假设往往是不全面的. 我自己找到的假设的方法有两种,一种是命名,一种是时序.全程性 ...
- java ArrayList的序列化分析
一.绪论 所谓的JAVA序列化与反序列化,序列化就是将JAVA 对象以一种的形式保持,比如存放到硬盘,或是用于传输.反序列化是序列化的一个逆过程. JAVA规定被序列化的对象必须实现java.io.S ...