STM32和STR71X移植uCos-II操作系统比较分析
STM32和STR71X移植uCos-II操作系统比较分析
——ARM7 TDMI和ARMv7-M Cortex-M3 的异同
STM32F103ZE,大容量,ARMv7-M,Cortex-M3系列,双堆栈,handler模式和线程模式,中断比较简单,且中断向量表偏移也很容易;
STR710FZ2,ARM7TDMI,七种模式,快速中断和外部中断,中断执行流程比较复杂。
1 临界区的实现
1.1 STM32的实现
进入临界区#define OS_ENTER_CRITICAL() {cpu_sr = OS_CPU_SR_Save();}
OS_CPU_SR_Save
MRS R0, PRIMASK ; 保存到R0,即返回值cpu_sr就是R0的值
CPSID I ;关中断,Cortex-M3特殊指令
BX LR
退出临界区#define OS_EXIT_CRITICAL() {OS_CPU_SR_Restore(cpu_sr);}
OS_CPU_SR_Restore
MSR PRIMASK, R0 ;传入的参数cpu_sr就是R0的值
BX LR
程序中如何保护R0的,细看汇编发现,实际上在执行关中断后,将R0保存到了sp+8处,开中断时再取出来,这样才保证了不会被修改。
STR r0,[sp,#0x08]tPendTimes = 0;
同时,开中断, LDR r0,[sp,#0x08],则从sp+8处取出来,保存到R0中。
需要说明的是,如果先执行了一次关中断(执行CPSID I 后,PRIMASK的值变为了1)再执行一次关中断(保存PRIMASK的值到R0中,但是此刻PRIMASK的值已经是1了),然后再执行开中断(将R0保存到PRIMASK,实际值仍然是1,无法打开中断)。
1.2 STR71X的实现
进入临界区#define OS_ENTER_CRITICAL() {cpu_sr = OS_CPU_SR_Save();}
OS_CPU_SR_Save
MRS R0,CPSR ; 将CPSR保存到R0中
ORR R1,R0,#NO_INT ;NO_INT-C0,则将CPSR的I、F位设为1
MSR CPSR_c,R1 ;将R1的值存入CPSR的低8位,控制域
MRS R1,CPSR ;下面四句确保I、F位变为1了
AND R1,R1,#NO_INT
CMP R1,#NO_INT
BNE OS_CPU_SR_Save ; Not properly disabled (try again)
BX LR ;
退出临界区#define OS_EXIT_CRITICAL() {OS_CPU_SR_Restore(cpu_sr);}
OS_CPU_SR_Restore
MSR CPSR_c,R0 ;将传入的参数cpu_sr保存到CPSR的控制域
BX LR
2任务的调度、切换
2.1 STM32的实现
STM32是Cortex-M3的内核,有双堆栈功能,且支持软中断,故很容易实现。实现的机理是触发一个软中断,然后在软中断里执行任务调度。
2.1.1 任务堆栈的初始化
任务建立以后,需要对其堆栈进行初始化操作,实际就是将需要用到的通用寄存器入栈,不同的芯片,入栈次序不同。Cortex-M3在发生中断时,由硬件自动将R0等8个寄存器入栈了,为了配合这一特性,堆栈初始化函数写成下面的。
函数的有4个参数,第一个是建立的任务地址,第二是建立任务时携带的参数,第三个是任务的栈顶(堆栈方向增长方向是向下),第4个是可选的参数。
其中装载的这些寄存器:
R1-R12没有什么意义;
R0是传入的参数;
R14是连接寄存器,初值是0xFFFF FFFE,最低4位是E,是个非法值,主要目的是不让使用R14,即任务无法返回;
R15是PC指针,指向任务的入口;
XPSR由APSR、IPSR、EPSR 3个组合而成,第24位必须为1。
OS_STK *OSTaskStkInit (void (*task)(void *p_arg), void *p_arg, OS_STK *ptos, INT16U opt)
{
OS_STK *stk;
(void)opt; /* 'opt' 不需要可选参数 */
stk = ptos; /* 装载栈顶 */
/* 这8个寄存器中断发生时,会自动入栈 */
*(stk) = (INT32U)0x01000000L; /* xPSR,第24位必须为1 */
*(--stk) = (INT32U)task; /* Entry Point ,PC 指针,执行任务的地址*/
*(--stk) = (INT32U)0xFFFFFFFEL; /* R14 (LR) (init value will cause fault if ever used) */
*(--stk) = (INT32U)0x12121212L; /* R12 */
*(--stk) = (INT32U)0x03030303L; /* R3 */
*(--stk) = (INT32U)0x02020202L; /* R2 */
*(--stk) = (INT32U)0x01010101L; /* R1 */
*(--stk) = (INT32U)p_arg; /* R0 : argument,传入的参数 */
/* 这8个也需要保存 */
*(--stk) = (INT32U)0x11111111L; /* R11 */
*(--stk) = (INT32U)0x10101010L; /* R10 */
*(--stk) = (INT32U)0x09090909L; /* R9 */
*(--stk) = (INT32U)0x08080808L; /* R8 */
*(--stk) = (INT32U)0x07070707L; /* R7 */
*(--stk) = (INT32U)0x06060606L; /* R6 */
*(--stk) = (INT32U)0x05050505L; /* R5 */
*(--stk) = (INT32U)0x04040404L; /* R4 */
return (stk);
}
2.1.2 开始多任务调度
在main函数的末尾调用OSStart函数,此函数计算处就绪任务表中优先级最高的那个,然后调用下面的函数,触发软中断,开始多任务调度,然后永远都不会在返回main函数。
OSStartHighRdy
LDR R0, =NVIC_SYSPRI2 ; 设置OSPendSV的优先级是255,最低
LDR R1, =NVIC_PENDSV_PRI
STRB R1, [R0]
MOVS R0, #0 ; PSP线程堆栈指针的值设为0
MSR PSP, R0
LDR R0, __OS_Running ; 将OS_Running设为1,开始多任务调度
MOVS R1, #1
STRB R1, [R0]
LDR R0, =NVIC_INT_CTRL ; 触发一次OSPendSV的软中断
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
CPSIE I ;开总中断
2.1.3 多任务调度的处理
真正实现任务的切换是在OSPendSV的中断里实现的,需要说明的是cortex-M3在发生中断时,由硬件自动将R0、R1、R2、R3、R12、R14、R15、XPSR等8个寄存器入栈了。
OSPendSV
CPSID I ;任务切换期间需要关中断
MRS R0, PSP ; 判断PSP是否是0,首次切换时是0
CBZ R0, OSPendSV_nosave ; 若是首次切换,不需要执行下面的
;首次切换时,任务刚创建,R4-R11已经在堆栈中
SUBS R0, R0, #0x20 ; R0 = R0 – 0x20,将R4-R11这8个寄存器入栈
STM R0, {R4-R11}
LDR R1, __OS_TCBCur ; OSTCBCur->OSTCBStkPtr = SP;
LDR R1, [R1] ;OSTCBCur的第一个元素的地址就是它本身地
STR R0, [R1] ; 址,此时R1中保存的是要被切换的任务的堆栈
;地址,实际是保存被切换时的堆栈
OSPendSV_nosave
PUSH {R14} ;R14入栈,执行OS_TaskSwHook函数,然后出栈
LDR R0, __OS_TaskSwHook
BLX R0
POP {R14}
LDR R0, __OS_PrioCur ; OS_PrioCur变为OS_PrioHighRdy
LDR R1, __OS_PrioHighRdy
LDRB R2, [R1]
STRB R2, [R0]
LDR R0, __OS_TCBCur ; OS_TCBCur变为OS_TCBHighRdy
LDR R1, __OS_TCBHighRdy
LDR R2, [R1]
STR R2, [R0]
LDR R0, [R2] ; R0是新任务的SP
LDM R0, {R4-R11} ; 弹出R4-R11等8个寄存器的值
ADDS R0, R0, #0x20
MSR PSP, R0 ;PSP变为R0的值
ORR LR, LR, #0x04 ; 见权威指南P40页,确保使用线程堆栈
CPSIE I ; 开总中断
BX LR
2.1.4 线程中请求任务调度
当任务主动让出CPU时,需要进行任务切换,则会执行OS_Sched函数,此函数调用采用OS_TASK_SW完成任务切换。
#define OS_TASK_SW() OSCtxSw()
OSCtxSw ;悬起PSV异常
LDR R0, =NVIC_INT_CTRL ; 触发PSV中断
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
2.1.5 中断中请求任务调度
中断执行完毕后,如果需要执行任务切换,则会执行void OSIntExit (void)函数,此函数中调用OSIntCtxSw();完成任务切换。
OSIntCtxSw ;悬起PSV异常
LDR R0, =NVIC_INT_CTRL ; 触发PSV中断
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
这样在中断里请求调度和在任务里请求调度,变得没有区别,Cortex-M3的特殊机制,采用触发软中断的方式,让任务的切换在中断里进行,而中断发生后,硬件又会自动将R0等8个寄存器入栈,这样使得操作起来变得容易,需要切换时,只需要触发一个软中断。
2.1.6 时钟节拍
STM32提供滴答计时器,可以用来实现,或者任意采用一个其它的定时器中断实现,主要内容如下。
void TIM2_IRQHandler(void)
{
OS_CPU_SR cpu_sr;
OS_ENTER_CRITICAL(); /* Tell uC/OS-II that we are starting an ISR*/
OSIntNesting++;
OS_EXIT_CRITICAL();
OSTimeTick(); //调用TimeTick,处理延时
OSIntExit(); //触发软中断,调度任务
}
2.2 STR71X的实现
STR71X没有软中断,且只有一个堆栈指针(线程和中断使用一个堆栈),任务切换时,修改堆栈指针,指向不同的地方,完成切换。
2.2.1任务堆栈的初始化
ARM7 TDMI中断发生时,硬件不会让寄存器自动入栈,因此需要将R0-R15等寄存器全部入栈,需要说明的是,STR71X的程序状态寄存器保存再了最后。ARM_SVC_MODE主要信息是特权模式、允许中断和快速中断、使用THUMB指令。
OS_STK *OSTaskStkInit (void (*task)(void *p_arg), void *p_arg, OS_STK *ptos, INT16U opt)
{
OS_STK *stk;
opt = opt; /* 'opt' is not used, prevent warning */
stk = ptos; /* Load stack pointer */
*(stk) = (OS_STK)task; /* Entry Point */
*(--stk) = (INT32U)0x14141414L; /* R14 (LR) */
*(--stk) = (INT32U)0x12121212L; /* R12 */
*(--stk) = (INT32U)0x11111111L; /* R11 */
*(--stk) = (INT32U)0x10101010L; /* R10 */
*(--stk) = (INT32U)0x09090909L; /* R9 */
*(--stk) = (INT32U)0x08080808L; /* R8 */
*(--stk) = (INT32U)0x07070707L; /* R7 */
*(--stk) = (INT32U)0x06060606L; /* R6 */
*(--stk) = (INT32U)0x05050505L; /* R5 */
*(--stk) = (INT32U)0x04040404L; /* R4 */
*(--stk) = (INT32U)0x03030303L; /* R3 */
*(--stk) = (INT32U)0x02020202L; /* R2 */
*(--stk) = (INT32U)0x01010101L; /* R1 */
*(--stk) = (INT32U)p_arg; /* R0 : argument */
*(--stk) = (INT32U)ARM_SVC_MODE; /* CPSR (Enable both IRQ and FIQ interrupts) */
return (stk);
}
2.2.2 开始多任务调度
Main函数的结尾,调用OSStart函数,此函数调用下面的代码,实现任务的调度,然后永远都不会在返回。首先切换到特权模式,然后获取优先级最高的任务的堆栈,弹出保存的CPSR信息,弹出PC指针等,开始进入任务中执行。
OSStartHighRdy
MSR CPSR_c, #(NO_INT | SVC32_MODE) ;切换到特权模式,关闭I、F中断
LDR R0, =OSTaskSwHook ; 执行OSTaskSwHook();
MOV LR, PC
BX R0
LDR R4, =OSRunning ; OSRunning = TRUE,允许多任务调度
MOV R5, #1
STRB R5, [R4]
; SP切换到优先级最高的任务堆栈
LDR R4, =OSTCBHighRdy ;
LDR R4, [R4] ;
LDR SP, [R4] ; SP就是任务的堆栈
LDR R4, [SP], #4 ; 弹出CPSR
MSR SPSR_cxsf,R4 ;保存到SPSR
LDMFD SP!, {R0-R12,LR,PC}^ ; 弹出R0-R12,LR,PC
2.2.3 线程中请求任务调度
当任务主动让出CPU时,需要进行任务切换,则会执行OS_Sched函数,此函数调用OS_TASK_SW完成任务切换。
#define OS_TASK_SW() OSCtxSw()
OSCtxSw
STMFD SP!, {LR} ; 不知道为什么入栈两次,这样PC岂不是
STMFD SP!, {LR} ;与LR一样了?
STMFD SP!, {R0-R12} ; Push registers
MRS R4, CPSR ; Push current CPSR
TST LR, #1 ; See if called from Thumb mode
ORRNE R4, R4, #0x20 ; If yes, Set the T-bit
STMFD SP!, {R4}
LDR R4, =OSTCBCur ; OSTCBCur->OSTCBStkPtr = SP;
LDR R5, [R4]
STR SP, [R5]
LDR R0, =OSTaskSwHook ; OSTaskSwHook();
MOV LR, PC
BX R0
LDR R4, =OSPrioCur ; OSPrioCur = OSPrioHighRdy
LDR R5, =OSPrioHighRdy
LDRB R6, [R5]
STRB R6, [R4]
LDR R4, =OSTCBCur ; OSTCBCur = OSTCBHighRdy;
LDR R6, =OSTCBHighRdy
LDR R6, [R6]
STR R6, [R4]
LDR SP, [R6] ; SP = OSTCBHighRdy->OSTCBStkPtr;
LDMFD SP!, {R4} ; 弹出R4
MSR SPSR_cxsf, R4
LDMFD SP!, {R0-R12,LR,PC}^ ; 弹出R0-R12,LR,PC
2.2.4 中断里请求任务调度
中断里请求任务调度,则会执行void OSIntExit (void)函数,此函数中调用OSIntCtxSw();完成任务切换。与任务中请求调度相比,省去了保存原来堆栈的寄存器部分,因为在进入中断时已经保存过一次了,想见下面的分析
OSIntCtxSw
LDR R0, =OSTaskSwHook ; OSTaskSwHook();
MOV LR, PC
BX R0
LDR R4,=OSPrioCur ; OSPrioCur = OSPrioHighRdy
LDR R5,=OSPrioHighRdy
LDRB R6,[R5]
STRB R6,[R4]
LDR R4,=OSTCBCur ; OSTCBCur = OSTCBHighRdy;
LDR R6,=OSTCBHighRdy
LDR R6,[R6]
STR R6,[R4]
LDR SP,[R6] ; SP = OSTCBHighRdy->OSTCBStkPtr;
LDMFD SP!, {R4} ; Pop new task's CPSR
MSR SPSR_cxsf, R4
LDMFD SP!, {R0-R12,LR,PC}^ ; Pop new task's context
2.2.5 时钟节拍
STR71X系列没有滴答定时器,要想实现时钟节拍,需要借助定时器的中断,代码如下。
void T2TIMI_IRQHandler(void)
{
OSTimeTick(); //中断服务程序只需要执行这个,前后两步采用汇编实现
}
STR71X的中断分为外部中断和快速中断,其处理流程是很复杂的。
(1)外部中断
OS_CPU_IRQ_ISR
STMFD SP!, {R1-R3} ;任务被打断以后,保存R1-R3到IRQ模式的堆栈中
MOV R1, SP ; R1暂存IRQ模式堆栈的位置
ADD SP, SP,#12 ; 恢复IRQ模式堆栈原来位置
SUB R2, LR,#4 ; R2成为PC指针位置
MRS R3, SPSR ;将任务此刻的CPSR保存到R3
MSR CPSR_c, #(NO_INT | SVC32_MODE) ; Change to SVC mode
STMFD SP!, {R2} ;保存PC
STMFD SP!, {LR} ;保存LR
STMFD SP!, {R4-R12} ;保存R4-R12
LDMFD R1!, {R4-R6} ;IRQ模式堆栈中恢复原来的R1-R3到R4-R6
STMFD SP!, {R4-R6} ;保存原来的R1-R3
STMFD SP!, {R0} ;保存R0
STMFD SP!, {R3} ;保存CPSR的值
; HANDLE NESTING COUNTER
LDR R0, =OSIntNesting ; OSIntNesting++;
LDRB R1, [R0]
ADD R1, R1,#1
STRB R1, [R0]
CMP R1, #1 ; 中断没有嵌套,执行下面的
BNE OS_CPU_IRQ_ISR_1
LDR R4, =OSTCBCur ;中断无嵌套,将SP的值付给当前任务的堆栈
LDR R5, [R4] ;保存被中断时的堆栈
STR SP, [R5] ;
OS_CPU_IRQ_ISR_1
MSR CPSR_c, #(NO_INT | IRQ32_MODE) ; 切换到IRQ模式
EIC_base_addr EQU 0xFFFFF800; EIC base address.
CICR_off_addr EQU 0x04 ; Current Interrupt Channel Register.
IVR_off_addr EQU 0x18 ; Interrupt Vector Register.
IPR_off_addr EQU 0x40 ; Interrupt Pending Register.
LDR R0, =(EIC_base_addr + IVR_off_addr)
MOV LR, PC
BX R0 ; 跳转到相应的IRQ中断处理程序
LDR R0, =EIC_base_addr
LDR R2, [R0, #CICR_off_addr] ; Get the IRQ channel number.
MOV R3, #1
MOV R3, R3, LSL r2
STR R3, [R0, #IPR_off_addr] ; 清楚中断标志.
MSR CPSR_c, #(NO_INT | SVC32_MODE) ; 切换到特权模式
LDR R0, =OSIntExit ; 中断完成,请求任务切换
MOV LR, PC
BX R0
; 执行新任务
LDMFD SP!, {R4} ; Pop new task's CPSR
MSR SPSR_cxsf, R4
LDMFD SP!, {R0-R12,LR,PC}^ ; Pop new task's context
(2)快速中断
快速中断的处理流程与外部中断基本相同,流程一致。
OS_CPU_FIQ_ISR
STMFD SP!, {R1-R3} ;
MOV R1, SP ; Save FIQ stack pointer
ADD SP, SP,#12 ; Adjust FIQ stack pointer
SUB R2, LR,#4 ; Adjust PC for return address to task
MRS R3, SPSR ; Copy SPSR (i.e. interrupted task's
MSR CPSR_c, #(NO_INT | SVC32_MODE) ; Change to SVC mode
STMFD SP!, {R2} ; Push task's Return PC
STMFD SP!, {LR} ; Push task's LR
STMFD SP!, {R4-R12} ; Push task's R12-R4
LDMFD R1!, {R4-R6} ; Move task's R1-R3 from FIQ
STMFD SP!, {R4-R6}
STMFD SP!, {R0} ; Push task's R0 onto task's
STMFD SP!, {R3} ; Push task's CPSR (i.e. FIQ's
; HANDLE NESTING COUNTER
LDR R0, =OSIntNesting ; OSIntNesting++;
LDRB R1, [R0]
ADD R1, R1,#1
STRB R1, [R0]
CMP R1, #1 ; if (OSIntNesting == 1) {
BNE OS_CPU_FIQ_ISR_1
LDR R4, =OSTCBCur ; OSTCBCur->OSTCBStkPtr = SP
LDR R5, [R4]
STR SP, [R5] ;
OS_CPU_FIQ_ISR_1
MSR CPSR_c, #(NO_INT | FIQ32_MODE) ; Change to FIQ mode
LDR R0, =FIQ_Handler ; FIQ_Handler();
MOV LR, PC
BX R0
MSR CPSR_c, #(NO_INT | SVC32_MODE) ; Change to SVC mode
LDR R0, =OSIntExit ; OSIntExit();
MOV LR, PC
BX R0
; RESTORE NEW TASK'S CONTEXT
LDMFD SP!, {R4} ; Pop new task's CPSR
MSR SPSR_cxsf, R4
LDMFD SP!, {R0-R12,LR,PC}^ ; Pop new task's context
3 任务调度中模式切换之间的区别
3.1 STR71X的模式切换
ARM7有7种模式,用户、系统、特权、外部中断、快速中断、数据访问中止、未定义指令中止等。
特权模式用于执行任务操作;
系统模式用于执行中断服务程序和main函数;
外部中断和快速中断模式则用于处理中断。
各种模式切换流程:
系统上电复位后,进入系统模式,执行完main函数后,切换到特权模式执行任务;
中断到来后:
先进入中断模式,
然后进入特权模式,保护寄存器到任务的堆栈空间,
再切换到中断模式查找中断向量对应的服务程序地址,找到以后,
切换到系统模式执行服务程序,完毕后再切换到中断模式,
返回后,切换到特权模式,执行中断请求任务调度,
中断返回,仍然是特权模式。
3.2 STM32的模式
Cortex-M3有特权级和用户级两个等级,以及线程模式和异常模式。
异常模式只能使用MSP主堆栈指针,而线程模式可以使用MSP或者PSP。
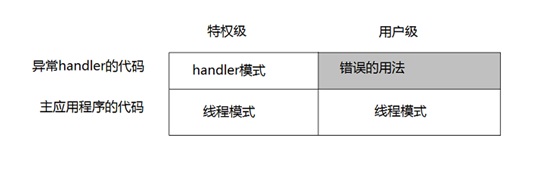
执行任务的代码是在特权级线程模式,执行中断的代码在特权级异常模式。
系统上电复位后,进入特权级线程模式,使用MSP,开始多任务调用后,使用PSP。
STM32和STR71X移植uCos-II操作系统比较分析的更多相关文章
- ucos实时操作系统学习笔记——操作系统在STM32的移植
使用ucos实时操作系统是在上学的时候,导师科研项目中.那时候就是网上找到操作系统移植教程以及应用教程依葫芦画瓢,功能实现也就罢了,没有很深入的去研究过这个东西.后来工作了,闲来无聊就研究了一下这个只 ...
- 基于STM32的uCGUI移植和优化
基于STM32的uCGUI移植和优化 首先在开始这个说明之前,要简要说明下具体的环境: 编译工具:MDK4.20 开发板:安富莱v2版开发板 调试器:JLink v8盗版 移植篇 相信大家有移植经验 ...
- FreeRTOS 和uCOS II的简单比较
转载:http://www.viewtool.com/bbs/forum.php?mod=viewthread&tid=114 这是两种RTOS, 现在粗略比较一下. freeRTOS比uCO ...
- 怎样把UCos-ii_在STM32上的移植
下载代码 stm32 标准外设库是 stm32 全系列芯片的外设驱动,有了它能够大大加速我们 开发 stm32. 首先从 st 公司的站点下载最新的 stm32 标准外设库,写本文时最新的版本号是 V ...
- ucos实时操作系统学习笔记——内核结构和任务创建
对于ucos实时操作系统,邵贝贝的那本书已经写得很详细了,我因为之前不深的研究过ucos,所以在这里做一个笔记,写一些个人对该操作系统的理解,仅仅是个人理解,如果有人看到这边随笔有不对的地方,望给我指 ...
- DE1-SOC开发板上搭建NIOS II处理器运行UCOS II
DE1-SOC开发板上搭建NIOS II处理器运行UCOS II 今天在DE1-SOC的开发板上搭建NIOS II软核运行了UCOS II,整个开发过程比较繁琐,稍微有一步做的不对,就会导致整个过 ...
- 基于STM32的uCOS-II移植详解
百度:基于STM32的uCOS-II移植详解 源:基于STM32的uCOS-II移植详解
- ucos ii 46个系统API函数解析
源: ucos ii 46个系统API函数解析
- 国内操作系统OS分析(上)
国内操作系统OS分析(上) 一.操作系统(OS)概述 操作系统(OS,Operating System),是管理.控制计算机软硬件资源的计算机程序,并为用户提供一个与系统交互的操作界面.OS是配置在计 ...
随机推荐
- Hive Join
最近被朋友问到有关于Hive Join的问题,保守回答过后,来补充补充知识: Hive是基于Hadoop的一个数据仓库工具,可以将结构化的数据文件映射为一张数据库表,并提供类SQL查询功能. 一.Hi ...
- java 输出菱形
package com.demo01; public class Triangle { /** * @param args */ /* * 第一步:规定输出的行数 * 第二步:输出空格 再输出一个星, ...
- TCP keepalive长连接心跳保活
比如:客户端与服务端进行握手时,经常无法握手成功,收不到回复: 需要建立保活机制. 1. 服务端Linux服务器新增系统内核参数配置. 在/etc/sysctl.conf文件中再添加如: #允许的持续 ...
- JS对象原型的理解
基于原型的语言 JavaScript 常被描述为一种基于原型的语言 (prototype-based language)——每个对象拥有一个原型对象,对象以其原型为模板.从原型继承方法和属性.原型对象 ...
- 原生JS编写getByClass、addClass、removeClass、hasClass
前言: 年后换了工作,在现在的公司写交互主要使用JS原生:刚刚入门前端的时候写交互一直用的原生JS,虽然用的不怎么样.后来去之前的公司之后,leader主张把jQuery用好,JS原生自然就熟练了:一 ...
- js对象之间的继承
js的对象之间的继承抛弃了原型与构造器的概念,而转为字面量对象之间进行属性拷贝的方式进行继承. 首先我们来写一个封装好的继承函数: function extend(parent){ var child ...
- CentOS 7运维管理笔记(3)----Linux路由器配置
当正在配置的Linux主机需要作为路由器使用时,通过以下步骤配置后,子网上的计算机就可以访问外网了: 1. 编辑 /etc/sysctl.conf 文件,添加 net.ipv4_ip_forward ...
- ES6入门——变量的解构赋值
1.数组的解构赋值 以前为变量复制,只能直接指定值.现在ES6允许按照一定模式,从数组和对象中提取值,对变量进行赋值,这被称为解构(Destructuring). 本质上,这种写法属于模式匹配,只要等 ...
- HTML头部声明文件类型
在你每一个页面的顶端,你需要文件声明.是的,必须. 如果不指定文件类型,你的HTML不是合法的HTML,并且大部分浏览器会用“怪癖模式(quirks mode)”来处理页面,这意味着浏览器认为你自己也 ...
- VS2015配置Entity Framework Power Tools Bate4,还有一些使用与注意的地方
今天使用vs2015重新安装了这个名为Entity Framework Power Tools的插件,由于它只支持到2013,因此需要进行一些操作方能使用 下面是一些参考文档 http://www.c ...