图像Demosaic算法及其matlab实现
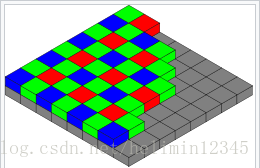
由于成本和面积等因素的限定,CMOS/CCD在成像时,感光面阵列前通常会有CFA(color filter array),如下图所示,CFA过滤不同频段的光,因此,Sensor的输出的RAW数据信号包含了3个通道的信息。由于人眼对绿色(大约550nm波长)光更敏感,因此CFA阵列包含1/2的G分量,1/4和R和1/4的B分量。
Sensor输出RAW数据后,需要经过Demosaic模块(ISP中)将其转成RGB图像。作为测试,我们可以对一幅全彩色RGB图进行RGB2Bayer转换,将其转换成RAW数据,再进行Bayer2RGB转换,输出RGB,对比输入和输出,可判断算法是否有效。
Bayer2RGB的转换方法有许多,下面给出基于3x3窗口简单插值的代码,支持BGGR、RGGB、GBRG三种bayer格式。输入一幅RGB图像,先进行RGB2Bayer转换,再进行Bayer2RGB转换。
%% ------------------------------------
% Author : lemonHe
% Time : 20180814
% Function : Demosaic
%%------------------------------------
clc;
clear;
close all;
imSrc = imread('detailTest.bmp');
% imSrc = imread('./bayer_data/bayer_1920x1080_12bit.tif');
figure,imshow(imSrc);
[hei, wid, chan] = size(imSrc);
bayer = uint8(zeros(hei,wid));
%% BGGR
% B G B G B G
% G R G R G R
% B G B G B G
% for ver = 1:hei;
% for hor = 1:wid
% if((1 == mod(ver,2)) && (1 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,3);
% elseif((0 == mod(ver,2)) && (0 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,1);
% else
% bayer(ver,hor) = imSrc(ver,hor,2);
% end
% end
% end
%
% figure,imshow(bayer);
%
% bayerPadding = zeros(hei+2,wid+2);
% bayerPadding(2:hei+1,2:wid+1) = bayer;
% bayerPadding(1,:) = bayerPadding(3,:);
% bayerPadding(hei+2,:) = bayerPadding(hei,:);
% bayerPadding(:,1) = bayerPadding(:,3);
% bayerPadding(:,wid+2) = bayerPadding(:,wid);
% imDst = zeros(hei+2, wid+2, chan);
%
% for ver = 2:hei+1
% for hor = 2:wid+1
% if(1 == mod(ver-1,2))
% if(1 == mod(hor-1,2))
% imDst(ver,hor,3) = bayerPadding(ver,hor);
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% else
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% imDst(ver,hor,3) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% end
% else
% if(1 == mod(hor-1,2))
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,1) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% else
% imDst(ver,hor,1) = bayerPadding(ver,hor);
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% end
% end
% end
% end
%
% imDst = uint8(imDst(2:hei+1,2:wid+1,:));
% figure,imshow(imDst);
%% RGGB
% R G R G R G
% G B G B G B
% R G R G R G
% for ver = 1:hei;
% for hor = 1:wid
% if((1 == mod(ver,2)) && (1 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,1);
% elseif((0 == mod(ver,2)) && (0 == mod(hor,2)))
% bayer(ver,hor) = imSrc(ver,hor,3);
% else
% bayer(ver,hor) = imSrc(ver,hor,2);
% end
% end
% end
%
% figure,imshow(bayer);
%
% bayerPadding = zeros(hei+2,wid+2);
% bayerPadding(2:hei+1,2:wid+1) = bayer;
% bayerPadding(1,:) = bayerPadding(3,:);
% bayerPadding(hei+2,:) = bayerPadding(hei,:);
% bayerPadding(:,1) = bayerPadding(:,3);
% bayerPadding(:,wid+2) = bayerPadding(:,wid);
% imDst = zeros(hei+2, wid+2, chan);
%
% for ver = 2:hei+1
% for hor = 2:wid+1
% if(1 == mod(ver-1,2))
% if(1 == mod(hor-1,2))
% imDst(ver,hor,1) = bayerPadding(ver,hor);
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% else
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,3) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% imDst(ver,hor,1) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% end
% else
% if(1 == mod(hor-1,2))
% imDst(ver,hor,2) = bayerPadding(ver,hor);
% imDst(ver,hor,3) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
% else
% imDst(ver,hor,3) = bayerPadding(ver,hor);
% imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
% imDst(ver,hor,1) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
% end
% end
% end
% end
%
% imDst = uint8(imDst(2:hei+1,2:wid+1,:));
% figure,imshow(imDst);
%% GBRG
% G B G B G B
% R G R G R G
% G B G B G B
for ver = 1:hei;
for hor = 1:wid
if((1 == mod(ver,2)) && (0 == mod(hor,2)))
bayer(ver,hor) = imSrc(ver,hor,3);
elseif((0 == mod(ver,2)) && (1 == mod(hor,2)))
bayer(ver,hor) = imSrc(ver,hor,1);
else
bayer(ver,hor) = imSrc(ver,hor,2);
end
end
end
figure,imshow(bayer);
bayerPadding = zeros(hei+2,wid+2);
bayerPadding(2:hei+1,2:wid+1) = bayer;
bayerPadding(1,:) = bayerPadding(3,:);
bayerPadding(hei+2,:) = bayerPadding(hei,:);
bayerPadding(:,1) = bayerPadding(:,3);
bayerPadding(:,wid+2) = bayerPadding(:,wid);
imDst = zeros(hei+2, wid+2, chan);
for ver = 2:hei+1
for hor = 2:wid+1
if(1 == mod(ver-1,2))
if(1 == mod(hor-1,2))
imDst(ver,hor,2) = bayerPadding(ver,hor);
imDst(ver,hor,1) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
imDst(ver,hor,3) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
else
imDst(ver,hor,3) = bayerPadding(ver,hor);
imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
imDst(ver,hor,1) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
end
else
if(1 == mod(hor-1,2))
imDst(ver,hor,1) = bayerPadding(ver,hor);
imDst(ver,hor,2) = (bayerPadding(ver-1,hor) + bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1) + bayerPadding(ver+1,hor)) / 4;
imDst(ver,hor,3) = (bayerPadding(ver-1,hor-1) + bayerPadding(ver-1,hor+1) + bayerPadding(ver+1,hor-1) + bayerPadding(ver+1,hor+1)) / 4;
else
imDst(ver,hor,2) = bayerPadding(ver,hor);
imDst(ver,hor,1) = (bayerPadding(ver,hor-1) + bayerPadding(ver,hor+1)) / 2;
imDst(ver,hor,3) = (bayerPadding(ver-1,hor) + bayerPadding(ver+1,hor)) / 2;
end
end
end
end
imDst = uint8(imDst(2:hei+1,2:wid+1,:));
figure,imshow(imDst);结果如下所示:


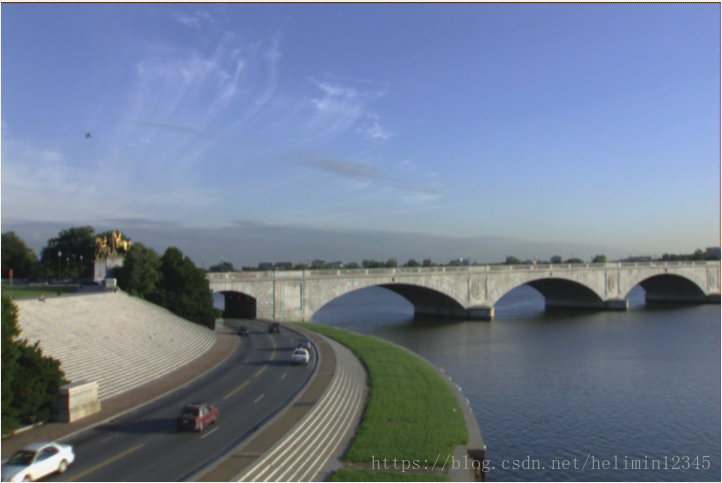
下图为Sensor输出的RGGB格式RAW数据,使用插值的方法对其进行还原

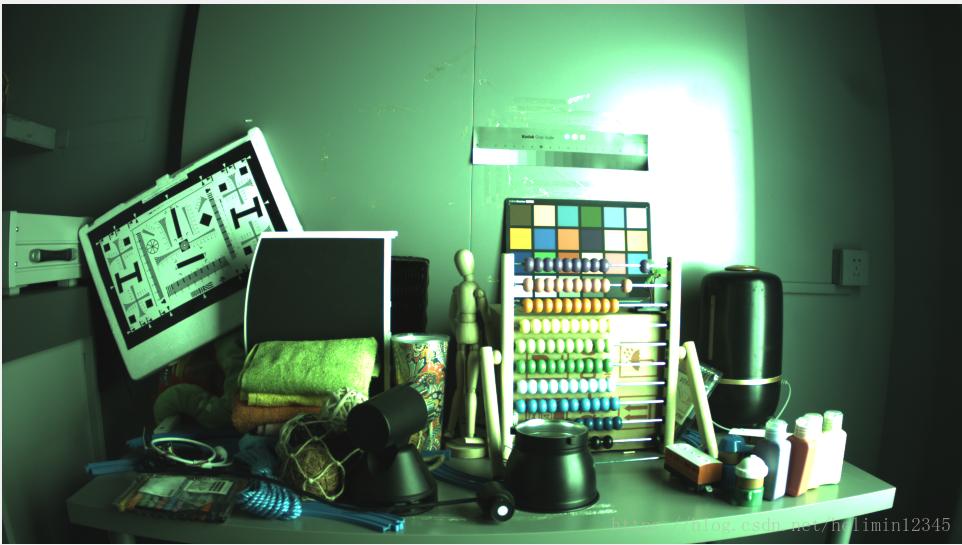
下面来看看客观指标测试,对于图像复原来说,通过可以根据PSNR和SSIM来评价算法性能。美国Kodak Data公司提供真彩无损图像数据,由专业的全彩色设备采集而来,每个pixel的R、G、B都是通过感光器件得到的,图像大小为512*768,每个通道为8bit。可以对该图像进行降采样,模拟CFA器件,再使用Demosaic算法对采样后的数据进行还原,计算PSNR和SSIM即可评价算法性能。
图像Demosaic算法及其matlab实现的更多相关文章
- 【图像配准】基于互信息的图像配准算法:MI、EMI、ECC算法
简单介绍: 基于互信息的图像配准算法以其较高的配准精度和广泛的适用性而成为图像配准领域研究的热点之中的一个.而基于互信息的医学图像配准方法被觉得是最好的配准方法之中的一个.基于此.本文将介绍简单的基于 ...
- 【VS开发】【图像处理】基于灰度世界、完美反射、动态阈值等图像自动白平衡算法的原理、实现及效果
基于灰度世界.完美反射.动态阈值等图像自动白平衡算法的原理.实现及效果 白平衡是电视摄像领域一个非常重要的概念,通过它可以解决色彩还原和色调处理的一系列问题.白平衡是随着电子影像再现色彩真实 ...
- GMM算法的matlab程序
GMM算法的matlab程序 在“GMM算法的matlab程序(初步)”这篇文章中已经用matlab程序对iris数据库进行简单的实现,下面的程序最终的目的是求准确度. 作者:凯鲁嘎吉 - 博客园 h ...
- Python实现图像边缘检测算法
title: "Python实现图像边缘检测算法" date: 2018-06-12T17:06:53+08:00 tags: ["图形学"] categori ...
- GMM算法的matlab程序(初步)
GMM算法的matlab程序 在https://www.cnblogs.com/kailugaji/p/9648508.html文章中已经介绍了GMM算法,现在用matlab程序实现它. 作者:凯鲁嘎 ...
- KFCM算法的matlab程序(用FCM初始化聚类中心)
KFCM算法的matlab程序(用FCM初始化聚类中心) 在“聚类——KFCM”这篇文章中已经介绍了KFCM算法,现在用matlab程序对iris数据库进行实现,用FCM初始化聚类中心,并求其准确度与 ...
- KFCM算法的matlab程序
KFCM算法的matlab程序 在“聚类——KFCM”这篇文章中已经介绍了KFCM算法,现在用matlab程序对iris数据库进行简单的实现,并求其准确度. 作者:凯鲁嘎吉 - 博客园 http:// ...
- FCM算法的matlab程序2
FCM算法的matlab程序2 在“FCM算法的matlab程序”这篇文章中已经用matlab程序对iris数据库进行实现,并求解准确度.下面的程序是另一种方法,是最常用的方法:先初始化聚类中心,在进 ...
- FCM算法的matlab程序
FCM算法的matlab程序 在“FCM算法的matlab程序(初步)”这篇文章中已经用matlab程序对iris数据库进行简单的实现,下面的程序最终的目的是求准确度. 作者:凯鲁嘎吉 - 博客园 h ...
随机推荐
- JDBC中SQL语句与变量的拼接
变量为 keyWords String sql = "select id from t_user order by id + '"+keyWords+"';";
- burpsuite无法拦截本地流量
参考文章链接:https://blog.csdn.net/tb_youth/article/details/103436796?utm_medium=distribute.pc_relevant.no ...
- aaencode:用颜文字来加密吧
今天逛大佬博客发现了一个有意思的东西 ゚ω゚ノ= /`m´)ノ ~┻━┻ //*´∇`*/ ['_']; o=(゚ー゚) =_=3; c=(゚Θ゚) =(゚ー゚)-(゚ー゚); (゚Д゚) =(゚Θ゚ ...
- k8s ansible部署部署文档
一:基础系统准备 ubuntu 1804----> root密码:123456 主要操作: 1.更改网卡名称为eth0: # vim /etc/default/grub GRUB_CMDLI ...
- 你真的理解了java单例模式吗?讲别人都忽略的细节!
前言:老刘这篇文章敢做保证,java的单例模式讲的比大多数的技术博客都要好,讲述别人技术博客都没有的细节!!! 1 java单例模式 直接讲实现单例模式的两种方法:懒汉式和饿汉式,单例模式的概念自己上 ...
- SQL 查询增加语句
Select 'Insert into Auth_Key Values('''+convert(nvarchar(50),NEWID())+''','''+AuthKey+''',''' +Modul ...
- Core3.0部署后访问接口提示500.30
前言 在localhost直接运行的时候正常,发布之后访问就一直提示500.30 可能原因 app.UseExceptionHandler入参值 1.查看日志 大致提示Startup.cs的某个参数配 ...
- winform 跨线程 调用控件
public delegate void rtbCallBack(string txt); public void rtbAddText(string txt) { if (this.rtb.Invo ...
- Git提交错了不用慌,这三招帮你修改记录
大家好,今天我们来聊聊git当中一个很重要的功能--历史记录的修改. 有的时候我们会突然发现某个地方需要修改,最常见的某个不应该被提交的文件被提交了进来.我们希望它不只是在后序的版本当中不再出现,而是 ...
- 网络 IO 工作机制
ref: 深入分析 java web 技术内幕 2.3 两台计算机之间进行数据的传输需要经过很多步骤.首先有相互沟通的意向,然后还要有沟通的通道:通过电话还是面对面交流(物理链路).最后,两个人说话的 ...