Linux驱动之按键驱动编写(中断方式)
在Linux驱动之按键驱动编写(查询方式)已经写了一个查询方式的按键驱动,但是查询方式太占用CPU,接下来利用中断方式编写一个驱动程序,使得CPU占有率降低,在按键空闲时调用read系统调用的进程可以休眠,还是以以下步骤编写:
5、编写Makefile,编译驱动代码与测试代码,在开发板上运行
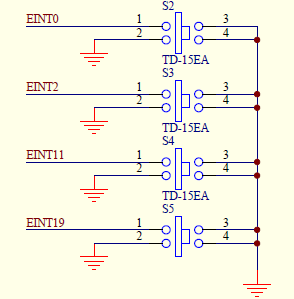
1、查看原理图,确定需要控制的IO端口
打开原理图,确定需要控制的IO端口为GPF0、GPF2、GPG3、GPG11。可以看到它的中断号为IRQ_EINT0、IRQ_EINT2、IRQ_EINT11、IRQ_EINT19
2、查看芯片手册,确定IO端口的寄存器地址,可以看到因为用了两组GPIO端口,所以它的基地址分别为0x56000050、0x56000060。中断方式的寄存器基地址为0x56000088、0x5600008c、0x56000090



3、编写驱动代码,编写驱动代码的步骤如下:
1)、编写出口、入口函数。代码如下,具体说明参考Linux驱动之LED驱动编写
static int second_drv_init(void)
{
Secondmajor = register_chrdev(, "buttons", &second_drv_ops);//注册驱动程序 if(Secondmajor < )
printk("failes 1 buttons_drv register\n"); second_drv_class = class_create(THIS_MODULE, "buttons");//创建类
if(second_drv_class < )
printk("failes 2 buttons_drv register\n");
second_drv_class_dev = class_device_create(second_drv_class, NULL, MKDEV(Secondmajor,), NULL,"buttons");//创建设备节点
if(second_drv_class_dev < )
printk("failes 3 buttons_drv register\n"); gpfcon = ioremap(0x56000050, );//重映射
gpfdat = gpfcon + ;
gpgcon = ioremap(0x56000060, );//重映射
gpgdat = gpgcon + ; printk("register buttons_drv\n");
return ;
} static void second_drv_exit(void)
{
unregister_chrdev(Secondmajor,"buttons"); class_device_unregister(second_drv_class_dev);
class_destroy(second_drv_class); iounmap(gpfcon);
iounmap(gpgcon); printk("unregister buttons_drv\n");
} module_init(second_drv_init);
module_exit(second_drv_exit);
2)、 添加file_operations 结构体,这个是字符设备驱动的核心结构,所有的应用层调用的函数最终都会调用这个结构下面定义的函数
static struct file_operations third_drv_ops =
{
.owner = THIS_MODULE,
.open = third_drv_open,
.read = third_drv_read,
.release = third_drv_close,//增加关闭函数
};
3)、分别编写file_operations 结构体下的open、read、release 函数。其中open函数主要将相应的IO端口配置成中断功能,并且向内核注册中断;read函数主要是在按键引脚电平未改变时休眠,然后按键引脚电平改变后,将按键值传给应用程序处理。(按键值的处理在中断处理程序中);relase函数的功能主要是从内核释放掉open函数注册的中断。程序如下:
static int third_drv_open (struct inode * inode, struct file * file)
{
int ret;
ret = request_irq(IRQ_EINT0, buttons_irq, IRQT_BOTHEDGE, "s1", (void * )&pins_desc[]);//注册一个外部中断S1,双边沿触发,dev_id为&pins_desc[0]
if(ret)
{
printk("open failed 1\n");
return -;
}
ret = request_irq(IRQ_EINT2, buttons_irq, IRQT_BOTHEDGE, "s2", (void * )& pins_desc[]);//注册一个外部中断S2,双边沿触发,dev_id为&pins_desc[1]
if(ret)
{
printk("open failed 2\n");
return -;
}
ret = request_irq(IRQ_EINT11, buttons_irq, IRQT_BOTHEDGE, "s3", (void * )&pins_desc[]);//注册一个外部中断S3,双边沿触发,dev_id为&pins_desc[2]
if(ret)
{
printk("open failed 3\n");
return -;
}
ret = request_irq(IRQ_EINT19, buttons_irq, IRQT_BOTHEDGE, "s4", (void * )&pins_desc[]);//注册一个外部中断S4,双边沿触发,dev_id为&pins_desc[3]
if(ret)
{
printk("open failed 4\n");
return -;
} return ;
} static int third_drv_close(struct inode * inode, struct file * file)
{
free_irq(IRQ_EINT0 ,(void * )&pins_desc[]);//释放中断,根据IRQ_EINT0找到irq_desc结构。根据pins_desc[0]找到irq_desc->action结构 free_irq(IRQ_EINT2 ,(void * )& pins_desc[]);//释放中断,根据IRQ_EINT2找到irq_desc结构。根据pins_desc[2]找到irq_desc->action结构 free_irq(IRQ_EINT11 ,(void * )&pins_desc[]);//释放中断,根据IRQ_EINT11找到irq_desc结构。根据pins_desc[3]找到irq_desc->action结构 free_irq(IRQ_EINT19 ,(void * )&pins_desc[]);//释放中断,根据IRQ_EINT19找到irq_desc结构。根据pins_desc[4]找到irq_desc->action结构 return ;
} static ssize_t third_drv_read(struct file * file, char __user * userbuf, size_t count, loff_t * off)
{
int ret; if(count != )
{
printk("read error\n");
return -;
} wait_event_interruptible(button_waitq, ev_press);//将当前进程放入等待队列button_waitq中,并且释放CPU进入睡眠状态 ret = copy_to_user(userbuf, &key_val, );//将取得的按键值传给上层应用
ev_press = ;//按键已经处理可以继续睡眠 if(ret)
{
printk("copy error\n");
return -;
} return ;
}
4)、中断处理函数的编写,中断处理函数利用注册中断时传入的dev_id这个值来判断是哪个按键发生了中断,dev_iq被赋值为pin_desc结构,如下:
struct pin_desc
{
unsigned int pin; //是哪个按键
unsigned int key_val; //按键的按键值
}; static struct pin_desc pins_desc[] =
{
{S3C2410_GPF0,0x01},
{S3C2410_GPF2,0x02},
{S3C2410_GPG3,0x03},
{S3C2410_GPG11,0x04}
};
取得哪个引脚发生的中断信息后,取得相应的引脚电平,然后确定按键值。接着将值传给key_val,再唤醒调用read的进程,将值直接拷贝给应用程序。具体函数如下
static unsigned int key_val;//全局变量 /*
*0x01、0x02、0x03、0x04表示按键被按下
*/ /*
*0x81、0x82、0x83、0x84表示按键被松开
*/ /*
*利用dev_id的值为pins_desc来判断是哪一个按键被按下或松开
*/
static irqreturn_t buttons_irq(int irq, void *dev_id)
{
unsigned int pin_val;
struct pin_desc * pin_desc = (struct pin_desc *)dev_id;//取得哪个按键被按下的状态,dev_id是action->dev_id,即在注册中断时传入的&pin_desc[num] pin_val = s3c2410_gpio_getpin(pin_desc->pin); //取得按键对应的IO口的电平状态 if(pin_val) //按键松开
key_val = 0x80 | pin_desc->key_val;
else
key_val = pin_desc->key_val; wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程,即调用read函数的进程 */
ev_press = ; return IRQ_HANDLED;
}
5)、整体代码
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <asm/io.h> //含有iomap函数iounmap函数
#include <asm/uaccess.h>//含有copy_from_user函数
#include <linux/device.h>//含有类相关的处理函数
#include <asm/arch/regs-gpio.h>//含有S3C2410_GPF0等相关的
#include <linux/irq.h> //含有IRQ_HANDLED\IRQ_TYPE_EDGE_RISING
#include <asm-arm/irq.h> //含有IRQT_BOTHEDGE触发类型
#include <linux/interrupt.h> //含有request_irq、free_irq函数 //#include <asm-arm\arch-s3c2410\irqs.h> static struct class *third_drv_class;//类
static struct class_device *third_drv_class_dev;//类下面的设备
static int thirdmajor; static unsigned long *gpfcon = NULL;
static unsigned long *gpfdat = NULL;
static unsigned long *gpgcon = NULL;
static unsigned long *gpgdat = NULL; struct pin_desc
{
unsigned int pin; //是哪个按键
unsigned int key_val; //按键的按键值
}; static struct pin_desc pins_desc[] =
{
{S3C2410_GPF0,0x01},
{S3C2410_GPF2,0x02},
{S3C2410_GPG3,0x03},
{S3C2410_GPG11,0x04}
}; unsigned int ev_press;
DECLARE_WAIT_QUEUE_HEAD(button_waitq);//注册一个等待队列button_waitq static unsigned int key_val;//全局变量 /*
*0x01、0x02、0x03、0x04表示按键被按下
*/ /*
*0x81、0x82、0x83、0x84表示按键被松开
*/ /*
*利用dev_id的值为pins_desc来判断是哪一个按键被按下或松开
*/
static irqreturn_t buttons_irq(int irq, void *dev_id)
{
unsigned int pin_val;
struct pin_desc * pin_desc = (struct pin_desc *)dev_id;//取得哪个按键被按下的状态,dev_id是action->dev_id,即在注册中断时传入的&pin_desc[num] pin_val = s3c2410_gpio_getpin(pin_desc->pin); //取得按键对应的IO口的电平状态 if(pin_val) //按键松开
key_val = 0x80 | pin_desc->key_val;
else
key_val = pin_desc->key_val; wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程,即调用read函数的进程 */
ev_press = ; return IRQ_HANDLED;
} static int third_drv_open (struct inode * inode, struct file * file)
{
int ret;
ret = request_irq(IRQ_EINT0, buttons_irq, IRQT_BOTHEDGE, "s1", (void * )&pins_desc[]);//注册一个外部中断S1,双边沿触发,dev_id为&pins_desc[0]
if(ret)
{
printk("open failed 1\n");
return -;
}
ret = request_irq(IRQ_EINT2, buttons_irq, IRQT_BOTHEDGE, "s2", (void * )& pins_desc[]);//注册一个外部中断S2,双边沿触发,dev_id为&pins_desc[1]
if(ret)
{
printk("open failed 2\n");
return -;
}
ret = request_irq(IRQ_EINT11, buttons_irq, IRQT_BOTHEDGE, "s3", (void * )&pins_desc[]);//注册一个外部中断S3,双边沿触发,dev_id为&pins_desc[2]
if(ret)
{
printk("open failed 3\n");
return -;
}
ret = request_irq(IRQ_EINT19, buttons_irq, IRQT_BOTHEDGE, "s4", (void * )&pins_desc[]);//注册一个外部中断S4,双边沿触发,dev_id为&pins_desc[3]
if(ret)
{
printk("open failed 4\n");
return -;
} return ;
} static int third_drv_close(struct inode * inode, struct file * file)
{
free_irq(IRQ_EINT0 ,(void * )&pins_desc[]);//释放中断,根据IRQ_EINT0找到irq_desc结构。根据pins_desc[0]找到irq_desc->action结构 free_irq(IRQ_EINT2 ,(void * )& pins_desc[]);//释放中断,根据IRQ_EINT2找到irq_desc结构。根据pins_desc[2]找到irq_desc->action结构 free_irq(IRQ_EINT11 ,(void * )&pins_desc[]);//释放中断,根据IRQ_EINT11找到irq_desc结构。根据pins_desc[3]找到irq_desc->action结构 free_irq(IRQ_EINT19 ,(void * )&pins_desc[]);//释放中断,根据IRQ_EINT19找到irq_desc结构。根据pins_desc[4]找到irq_desc->action结构 return ;
} static ssize_t third_drv_read(struct file * file, char __user * userbuf, size_t count, loff_t * off)
{
int ret; if(count != )
{
printk("read error\n");
return -;
} wait_event_interruptible(button_waitq, ev_press);//将当前进程放入等待队列button_waitq中,并且释放CPU进入睡眠状态 ret = copy_to_user(userbuf, &key_val, );//将取得的按键值传给上层应用
ev_press = ;//按键已经处理可以继续睡眠 if(ret)
{
printk("copy error\n");
return -;
} return ;
} static struct file_operations third_drv_ops =
{
.owner = THIS_MODULE,
.open = third_drv_open,
.read = third_drv_read,
.release = third_drv_close,//增加关闭函数
}; static int third_drv_init(void)
{
thirdmajor = register_chrdev(, "buttons", &third_drv_ops);//注册驱动程序 if(thirdmajor < )
printk("failes 1 buttons_drv register\n"); third_drv_class = class_create(THIS_MODULE, "buttons");//创建类
if(third_drv_class < )
printk("failes 2 buttons_drv register\n");
third_drv_class_dev = class_device_create(third_drv_class, NULL, MKDEV(thirdmajor,), NULL,"buttons");//创建设备节点
if(third_drv_class_dev < )
printk("failes 3 buttons_drv register\n"); gpfcon = ioremap(0x56000050, );//重映射
gpfdat = gpfcon + ;
gpgcon = ioremap(0x56000060, );//重映射
gpgdat = gpgcon + ; printk("register buttons_drv\n");
return ;
} static void third_drv_exit(void)
{
unregister_chrdev(thirdmajor,"buttons"); class_device_unregister(third_drv_class_dev);
class_destroy(third_drv_class); iounmap(gpfcon);
iounmap(gpgcon); printk("unregister buttons_drv\n");
} module_init(third_drv_init);
module_exit(third_drv_exit); MODULE_LICENSE("GPL");
4、确定应用程序功能,编写测试代码。
测试程序实现四个按键中有一个按键按下时,打印出这个按键的按键值。./third_test。直接看代码
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h> /*
*usage ./buttonstest
*/
int main(int argc, char **argv)
{
int fd;
char* filename="dev/buttons";
unsigned char key_val;
unsigned long cnt=;
fd = open(filename, O_RDWR);//打开dev/firstdrv设备文件
if (fd < )//小于0说明没有成功
{
printf("error, can't open %s\n", filename);
return ;
} if(argc !=)
{
printf("Usage : %s ",argv[]);
return ;
} while()
{
read(fd, &key_val, );
printf("key_val: %x\n",key_val);
} return ;
}
5、编写Makefile,编译驱动代码与测试代码,在开发板上运行
Makefile源码如下:
KERN_DIR = /work/system/linux-2.6.22.6 all:
make -C $(KERN_DIR) M=`pwd` modules //M='pwd'表示当前目录。这句话的意思是利用内核目录下的Makefile规则来编译当前目录下的模块 clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order obj-m +=third_drv.o//调用内核目录下Makefile编译时需要用到这个参数
1)、然后在当前目录下make后编译出third_drv.ko文件
2)、arm-linux-gcc -o third_test third_test.c编译出third_test测试程序
3)、cp third_drv.ko third_test /work/nfs_root将编译出来的文件拷贝到开发板挂接的网络文件系统上
4)、执行insmod third_drv.ko加载驱动。
5)、./third_test测试程序,按下按键,成功打印按键值,用top命令查看应用程序发现third_test程序占用了0%的CPU资源,驱动程序相比查询方式的驱动改善了。
Linux驱动之按键驱动编写(中断方式)的更多相关文章
- Linux驱动之按键驱动编写(查询方式)
在Linux驱动之LED驱动编写已经详细介绍了一个驱动的编写过程,接着来写一个按键驱动程序,主要是在file_operations结构中添加了一个read函数.还是分以下几步说明 1.查看原理图,确定 ...
- Linux输入子系统 : 按键驱动
一.Linux input system框架: 1.由输入子系统核心层(input.c),驱动层(gpio_keys.c)和事件处理层(Event Handler)三部份组: 2.主要的三个结构体:i ...
- zigbee学习之路(四):按键控制(中断方式)
一.前言 通过上次的学习,我们学习了如何用按键控制led,但是在实际应用中,这种查询方式占用了cpu的时间,如果通过中断控制就可以解决这个问题,我们今天就来学习按键控制的中断方式. 二.原理分析 传统 ...
- 字符设备驱动笔记——中断方式按键驱动之linux异常处理结构(四)
.中断方式获取按键值 单片机: )按键按下 )cup发生中断,跳转到异常向量入口执行 )b 函数 a.保存被中断的现场 b.执行中断处理函数 c.恢复 linux: )trap_init()函数构造异 ...
- linux驱动之中断方式获取键值
linux驱动之中断方式获取键值 ----------------------------------------------------------------------------------- ...
- 在Linux下的中断方式读取按键驱动程序
// 在Linux下的中断方式读取按键驱动程序 //包含外部中断 休眠 加入poll机制 // 采用异步通知的方式 // 驱动程序发 ---> app接收 (通过kill_fasync()发送) ...
- Linux按键驱动程序设计--从简单到不简单【转】
本文转载自:http://blog.csdn.net/coding__madman/article/details/51399353 混杂设备驱动模型: 1. 混杂设备描述 在Linux系统中,存在一 ...
- Linux按键驱动程序设计详解---从简单到不简单【转】
转自:http://blog.csdn.net/coding__madman/article/details/51399353 版权声明:本文为博主原创文章,未经博主允许不得转载. 混杂设备驱动模型: ...
- Linux驱动之触摸屏程序编写
本篇博客分以下几部分讲解 1.介绍电阻式触摸屏的原理 2.介绍触摸屏驱动的框架(输入子系统) 3.介绍程序用到的结构体 4.介绍程序用到的函数 5.编写程序 6.测试程序 1.介绍电阻式触摸屏的原理 ...
随机推荐
- 我发起并创立了一个 .Net 平台上的 Web 业务系统 基础库 开源项目 WebEasy
我 强调一点, 程序员 应该对 程序 有 控制感 . 过多的 控制反转 使 程序员 丧失了 对 程序 的 控制感 . 过多的 依赖注入 束缚了 程序员 的 创造力 . 过度复杂的 架构设计 束缚了 程 ...
- Linux内核分析第二次作业
这周学习了<庖丁解牛Linux内核分析>并且学习了实验楼的相关知识. 在实验楼的虚拟环境下编写代码: 通过gcc编译后,使用查看文件命令:cat -n 20189223.c 在vim中, ...
- python logging配置时间或大小轮转
python中的很多模块是非常牛X的,之前提到过logging模块(其功能类似于java下的Log4j ),由于最近一个涉及网络排障的脚本需要日志输出,这里就使用了python的logging模块去实 ...
- Spark性能优化指南——高级篇
本文转载自:https://tech.meituan.com/spark-tuning-pro.html 美团技术点评团队) Spark性能优化指南——高级篇 李雪蕤 ·2016-05-12 14:4 ...
- instant client 的配置
instant client 的配置 oracle server developer自带了客户端 解压目录:D:\Toolkit\instantclient_11_2 设置环境变量 Ø 在Path变 ...
- Flask--templates-多个模板文件,视图函数如何判断查询路径
结论:以当前视图的模板为基准,查找模板文件,如果没有找到就会报错,如果需要更换模板的访问路径,可以修改__name__参数. 参考资料: https://blog.csdn.net/f70408410 ...
- 围绕Buganizer的产品流程
做技术的一定知道缺陷跟踪系统(bug系统),更不用说做测试的了,不过普遍都认为这系统是用来记录bug的,其实在google内部,这套系统是产品/项目围绕的核心.Google Buganizer扩展了类 ...
- if else和switch case那个效率更高一点
switch...case写法: switch (表达式){ case 值1 : 语句1 break; case 值2 : 语句2 break; ... default : 语句n break; } ...
- 《Celeste》 开发者是如何精心制作“冲刺”的
转自:http://www.gameres.com/804804.html 简介与序曲 在Celesete里,许多细微的行动都是发生在转瞬之间的,甚至往往比你想象中还要“转瞬之间”. 这里是 [游戏机 ...
- Node安装及自定义config
下载Node.js , Windows下安装一键到底, 没有什么说的. 主要是默认无法流畅使用, 包括流畅下载, 全局缓存之类. 如下是进一步设置, 包括: - 设置淘宝镜像. - 增加Yarn(np ...