【单片机入门】(四)应用层软件开发的单片机学习之路-----ESP32开发板PWM控制电机以及中断的使用
引言
各位大佬,晚上好啊,在上一篇博客中,我们讲了什么是UART串口通讯,以及使用USB转TTL使得单片机可以和c#上位机做一个串口通讯,接下来,为大家带来PWM的概念原理,以及实际案例,使用PWM对电机进行速度调制,因为本课程的最后是做一个红外遥控的智能小车,所以是需要电机四个,驱动四个,轮胎四个,所以PWM对于最后的成果也是极为重要,并且在实际开发中,PWM也是比较常用的调速方式。
概念
PWM全称Pulse width modulation,中文翻译为脉冲宽度调制,其基本原理为控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等但宽度不一致的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
可能上面对于原理的解释过于官方,大家可能看不懂,通俗易懂的来说,就是通过对电子元器件的电路进行高低电平进行控制,在一段时间内,高低电平在输出会形成一段波动,这个波动可以成为PWM波形,而我们需要使用代码去控制PWM的输出波形,高电平在这一段波动中,通电时间即高电平时间是占了总时间多少,同时在这一段PWM波形中,高低电平来回切换的频率又是多少,形成了这么一段波形,这就引入了两个概念,占空比(Duty Ratio)和频率,占空比代表着,高电平通电总时和总时的一个占比(这段波形中,高低电平的总共占用时间),而频率则是高低电平在这段波形中,来回切换的一个频率。
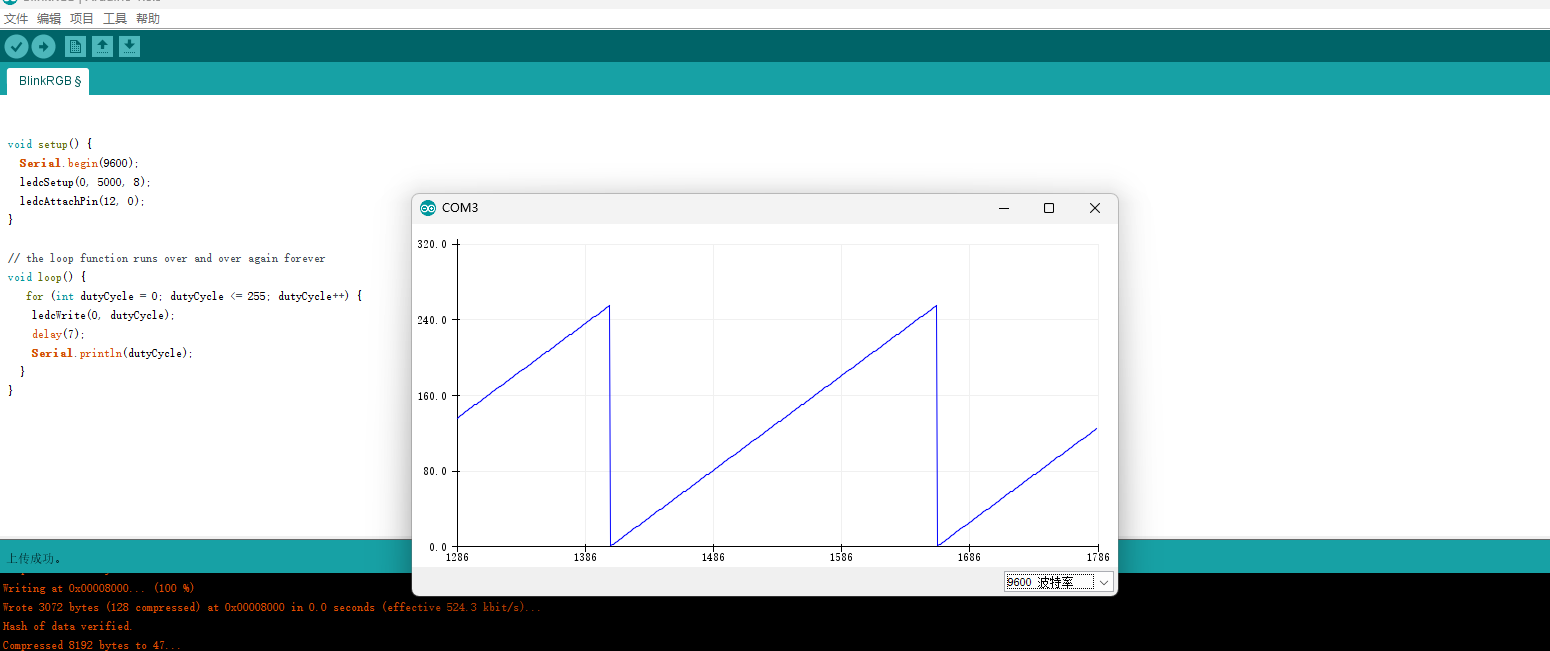
如下图,下方在Arduino串口绘图器中,展示了一段锯齿波形,看下方的GIF我们可以看到对应的电机运动也是有快到慢的一个运动状态。
代码解析
void setup() {
Serial.begin(9600);
ledcSetup(0, 5000, 8);
ledcAttachPin(12, 0);
}
// the loop function runs over and over again forever
void loop() {
for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {
ledcWrite(0, dutyCycle);
delay(7);
Serial.println(dutyCycle);
}
}
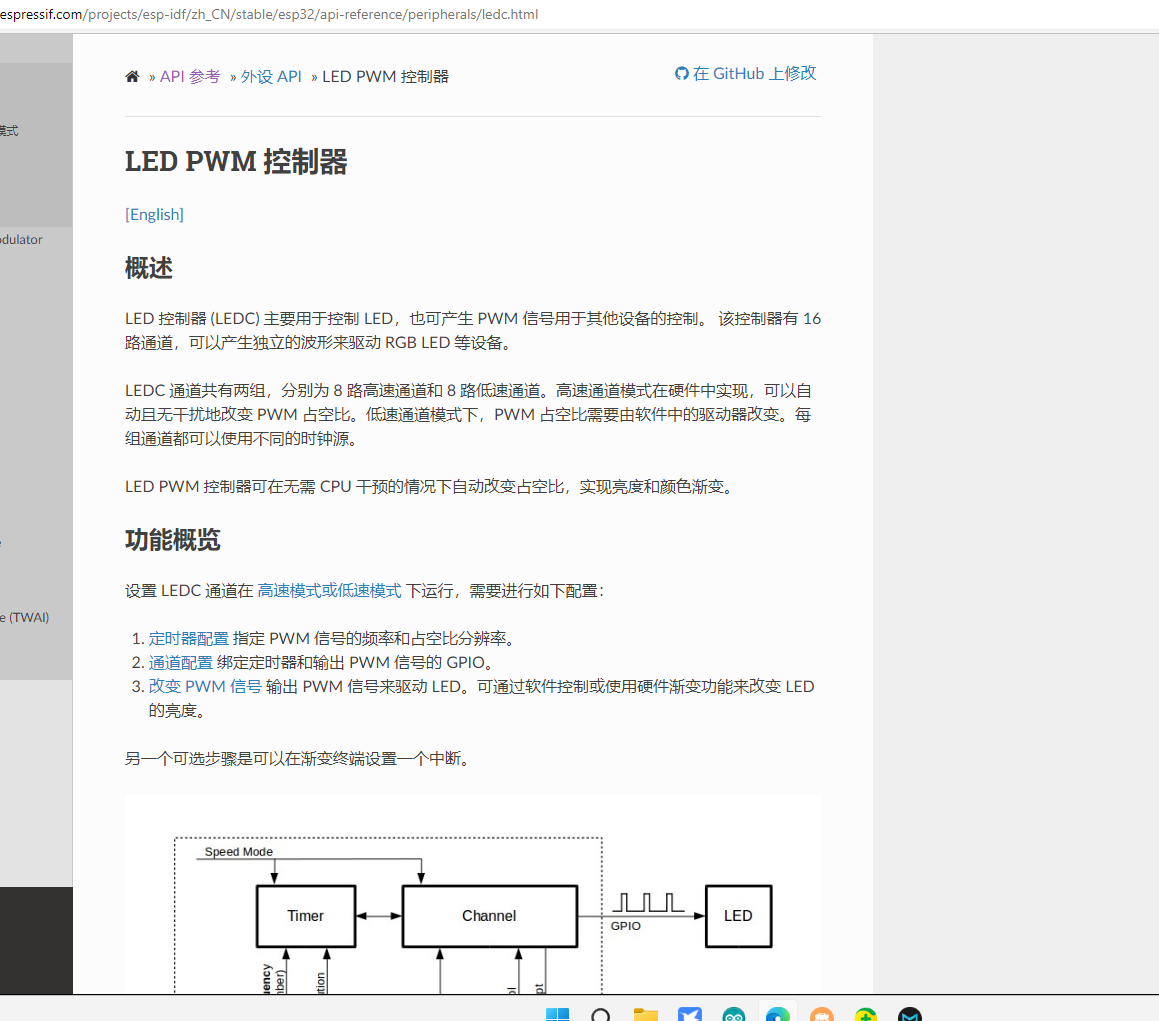
在Arduino中我们可以使用LEDC来实现对PWM的控制,而在纯c乐鑫的开发板中,是可以使用MCPWM进行控制,但是由于Arduino在此处不能使用MCPWM,则就有了LEDC作为替代品,ESP32带有一个16通道的一个LED PWM控制器,对应使用的是乐鑫的LED PWM控制,ESP32 LED PWM,分为8路高速通道和8路低速通道,然后我们使用不同的频率,和占空比来实现控制电机转速的控制。
在上面的代码中,我们先设置了ledc的通道为0,频率为5000,第八个低速LED控制器,即代码为 ledcSetup(0, 5000, 8);然后需要将通道和引脚进行管理使用ledcAttachPin(12, 0);将引脚12和第0个通道关联起来,在loop代码中,可以看到,我们写入的最大的占空比为255,而0-255总数为256,那是因为,占空比是和通道是有关系的,上文提到,LED的PWM控制器一共有16个,此处我们使用8,而256则为2的8次方的值,所以占空比最大为256,如果取值为10,占空比的最大值则为1024-1;ledcwrite(0,dutyCycle);则是将占空比写入对应的通道,便完成了PWM对电机进行调速设置。
Arduino针对ESP32 乐鑫PWM的封装,目前已知的有LEDC,不需要安装,默认就可以使用,而其他的也有对于PWM的封装,个人测试了一两个倒也没有这个好用,后续各位朋友也可以继续探索其他好用的PWM库进行开发。
中断
在上面讲完PWM之后,我们再来讲一下中断,以及中断的一个实际案例。中断,顾名思义,是在程序执行期间,遇到某一个事件的时候,将暂停手上的工作先去执行某一件事情,这个事情则是我们中断当下工作,去执行的事情,这个动作,称之为中断。虽然在代码中,可以注册一个后台任务(在纯c中),进行不停的while,但是这样在性能上还是无法发挥单片机的功效,所以这种场景下我们便需要使用中断,来实现我们的某种功能,例如使用按钮,来判断是否需要打开LED,或者是其他的行为。
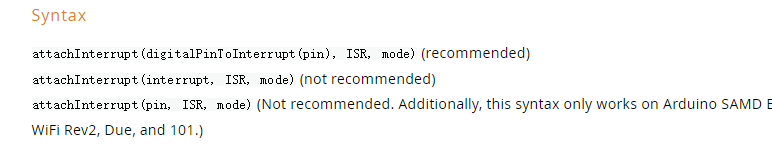
在Arduino中,我们可以使用attachInterrupt函数来进行对引脚增加中断以及使用detachInterrupt来移除中断,
attachInterrupt函数需要三个参数,第一个为中断需要使用的引脚pin,第二个为中断触发的函数,第三个为中断的类型,对于ESP32的中断,在Arduino中,其方法名前面必须加一个IRAM_ATTR标记其为中断函数,第一个函数中的digitalPinToInterrupt为将27和中断进行一个绑定,同时还有其他方法,但是官方均不推荐,
在下方的代码中,我们定义了一个change的函数用来处理ESP32 27引脚的中断,用27引脚的电平控制LED引脚2的电平,以此来控制是否点亮LED灯,先设置引脚2为输出模式,27引脚为上拉输入模式,可以理解为上拉电阻的一般都需要用到这种模式,然后我们将引脚27和中断进行关联,设置中断函数为change,模式为CHANGE。然后在LOOP函数中,我们给引脚2写入state的值,当进入change中断函数中,会将state取反,然后进入loop写入值。以此实现控制LED的显示和不显示,在这里,提醒一下,由于在单片机中,中断以及定时器都是非阻塞模式,而Serial.println函数是阻塞写入缓冲区,会导致中断函数会不断的输出错误,错误:Guru Meditation Error: Core 1 panic'ed (Interrupt wdt timeout on CPU1).
这是因为println函数阻塞导致定时器无法继续执行,所过非要使用此函数,可以尝试设置中间变量,然后在loop函数中判断是否改变值,然后进行输出信息到串口。
可以在下方GIF看到,我们使用按钮进行控制LED的显示和不显示。
volatile byte state = LOW;
void IRAM_ATTR change()
{
state=!state;
}
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(2, OUTPUT);
pinMode(27, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(27), change, CHANGE);
}
void loop() {
digitalWrite(2, state);// put your main code here, to run repeatedly:
}
可以看到第二个方法是传入一个interrupt的中断编号,但是ESP32上面的中断编号,不在官方资料中,所以我们只有需要第一个方法来进行引脚和中断函数的关联,当然了可能最后一个也是可以,只是此处我没有尝试,感兴趣的可以进行尝试,
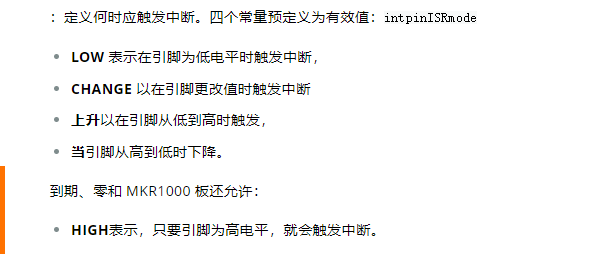
在mode中,Arduino是支持五种模式,第一种为LOW,,看翻译我们知道,这个是在电平处于低电平时会触发中断函数,
第二个CHANGE是不管是高到低,还是低到高,都会触发
第三种是引脚在由低电平到高电平时触发,而不是已经到了高电平触发,
第四种是下降,当电平由高到低时会触发中断函数,
第五种是电平处于高电平时会触发中断函数。
结语
今天讲了PWM还有中断的使用,可能一次性讲的有点多,有点难以消化,有什么不懂的可以及时问我,以及后面我更新的时间会稍微慢一点,防止讲的过快,一时间不明白,后面还会有对于IIC,SPI的一个案例讲解,在这些讲完后,我会开始准备最终极的目标,做一个智能小车,其中会需要的配件,这两天我会总结好发到群里,以及购买链接。有感兴趣的同学可以加QQ群,一起学习,一起讨论,博主也是一个刚开始玩单片机的学徒,后面也会研究stm32系列单片机,欢迎大家加入讨论,学习。

【单片机入门】(四)应用层软件开发的单片机学习之路-----ESP32开发板PWM控制电机以及中断的使用的更多相关文章
- 微信开发+百度AI学习:微信网页开发环境搭建
参考微信官方文档:https://mp.weixin.qq.com/wiki?t=resource/res_main&id=mp1421141115 两步即可获取微信网页开发能力 STEP1: ...
- 2021年正确的Android逆向开发学习之路
2021年正确的Android逆向开发学习之路 说明 文章首发于HURUWO的博客小站,本平台做同步备份发布.如有浏览或访问异常或者相关疑问可前往原博客下评论浏览. 原文链接 2021年正确的Andr ...
- 8_陀螺仪MPU6050和PWM控制在STM32F4-Discovery开发板上的实现
非常早曾经就把圆点博士的程序从STM32F103移植到STM32F4_Discovery (STM32F407), battery.陀螺仪和PWM电机控制的程序都已经測试完成,执行有一段时间,正常.以 ...
- 【单片机入门】(三)应用层软件开发的单片机学习之路-----UART串口通讯和c#交互
引言 在第一章博客中,我们讲了Arduino对Esp32的一个环境配置,以及了解到了常用的一个总线通讯协议,其中有SPI,IIC,UART等,今天我为大家带来UART串口通讯和c#串口进行通讯的一个案 ...
- Linux下开发STM32单片机
一开始学习51单片机就是用的MDK这个IDE软件,IDE软件虽然看起来直观好像更加容易入门(因为有界面看起来很形象),但是实际上IDE却是向我们这些入门人员隐藏了背后真实存在的过程,让我们以为编译就是 ...
- SaaS系列介绍之十四: SaaS软件开发分析
1 引言 真正的问题,不是电脑是否具备思考能力,而是人类是否具备这种能力 ________B.F.Skinner<计算机科学> SaaS模式不同于传 ...
- Spring Boot入门(四):开发Web Api接口常用注解总结
本系列博客记录自己学习Spring Boot的历程,如帮助到你,不胜荣幸,如有错误,欢迎指正! 在程序员的日常工作中,Web开发应该是占比很重的一部分,至少我工作以来,开发的系统基本都是Web端访问的 ...
- 四种软件开发模式:tdd、bdd、atdd和ddd的概念
看一些文章会看到TDD开发模式,搜索后发现有主流四种软件开发模式,这里对它们的概念做下笔记. TDD:测试驱动开发(Test-Driven Development) 测试驱动开发是敏捷开发中的一项核心 ...
- AndroidStudio快速入门四:打造你的开发工具,settings必备
http://blog.csdn.net/jf_1994/article/details/50085825 前言:这里是使用AS的基本设置,适合新入手的朋友阅读,将这里介绍的设置完基本使用无忧啦. 1 ...
随机推荐
- Html5新增内容标签
<canvas>画布</canvas> <audio src=""></audio> <video src="&qu ...
- 离线方式安装高可用RKE2 (版本: v1.22.13+rke2r1)记录
说明: 想要了解RKE2可以到官网(https://docs.rke2.io 或 https://docs.rancher.cn/docs/rke2/_index/)看最新资料 用官网给出的离线安装( ...
- Helm安装ingress-nginx-4.1.4
Application version 1.2.1 Chart version 4.1.4 获取chart包 helm fetch ingress-nginx/ingress-nginx --vers ...
- 华南理工大学 Python第1章课后小测
1.(单选)计算机有两个基本特性:功能性和()性.(本题分数:5)A) 可存储B) 可计算C) 可通信D) 可编程您的答案:D 正确率:100%2.(单选)计算机硬件可以直接识别和执行的程序设计语言 ...
- C#:winform窗体 实现类似QQ的窗体在桌面边缘停靠和隐藏
设计思路:1.使用定时器(Timer)来监控鼠标位置和窗体位置,并实现窗体的停靠和隐藏2.当鼠标拖动窗体时,窗体才有可能根据自身位置决定是否停靠3.如果窗体四周没有接触到屏幕边缘则不会停靠4.如果窗体 ...
- 《Java基础——抽象与接口》
Java基础--抽象与接口 一.抽象: 规则: 关键字 abstract 修饰的类称为抽象类. 子类通过关键字extends实现继承. 关键字 abstract 修饰的方法称为抽象方法,抽 ...
- Containerd 知识点
1.查看安装Containerd的版本 # ctr --version ctr github.com/containerd/containerd v1.6.6 # ctr version Client ...
- 使用mtr来判断网络丢包和网络延迟
转载自:https://mp.weixin.qq.com/s/UsjzMS1_rdxenw0TPlqwyQ 常用的 ping,tracert,nslookup 一般用来判断主机的网络连通性,其实 Li ...
- Kubernetes DevOps: Jenkins Pipeline (流水线)
要实现在 Jenkins 中的构建工作,可以有多种方式,我们这里采用比较常用的 Pipeline 这种方式.Pipeline,简单来说,就是一套运行在 Jenkins 上的工作流框架,将原来独立运行于 ...
- PAT (Basic Level) Practice 1023 组个最小数 分数 20
给定数字 0-9 各若干个.你可以以任意顺序排列这些数字,但必须全部使用.目标是使得最后得到的数尽可能小(注意 0 不能做首位).例如:给定两个 0,两个 1,三个 5,一个 8,我们得到的最小的数就 ...