读《An Adaptable and Extensible Geometry Kernel》
读《An Adaptable and Extensible Geometry Kernel》
利用Curiously Recurring Template Pattern替代虚函数
详细内容可以参考[1]。这里单纯列举出相关的代码示例:
// 使用继承的方式实现不同图形的绘制
class Shape
{
public:
Shape() {}
virtual ~Shape() {}
virtual void Draw() = 0;
};
class Triangle : public Shape
{
public:
Triangle() {}
~Triangle() {}
void Draw() { cout << "Draw a Triangle" << endl; }
};
class Rectangle : public Shape
{
public:
Rectangle() {}
~Rectangle() {}
void Draw() { cout << "Draw a Rectangle" << endl; }
};
// 利用Curiously Recurring Template Pattern
template <typename Derived>
class Shape
{
public:
void Draw()
{
return static_cast<Derived*>(this)->Draw();
}
};
class Triangle : public Shape<Triangle>
{
public:
void Draw() { cout << "Draw a Triangle" << endl; }
};
class Rectangle : public Shape<Rectangle>
{
public:
void Draw() { cout << "Draw a Rectangle" << endl; }
};
为什么需要Kernel
通过Kernel需要解决的主要问题是代码的适配性和可扩展性。那为什么可以提高适配性和可扩展性可以在后续的内容中得到答案。
Kernel的概念和架构
常见的数据结构和算法的设计,数据结构为独立的类,算法为全局或类的成员函数。示例如下:
K::Point_2 p(0,1), q(1,-4); // 数据结构
K::Line_2 line(p,q);
if (less_xy_2(p, q)) { ... } // 算法成员函数
几何Kernel包含需要操作的类型,以及针对这些类型的操作。Kernel会将上述相关的内容进行打包处理。示例如下:
K k;
K::Construct_line_2 c_line = k.construct_line_2_object();
K::Less_xy_2 less_xy = k.less_xy_2_object();
K::Point_2 p(0,1), q(1,-4);
K::Line_2 line = c_line(p, q);
if (less_xy(p, q)) { ... }
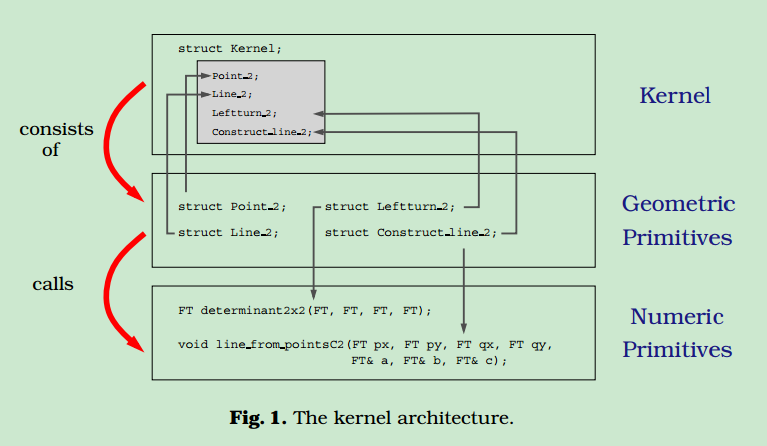
Kernel将数据结构和算法相关的细节放到了内部。整体的架构可以分为三层,Kernel, Geometric Primitives,Numeric Primitives,具体如下:
Kernel的实现
第一版本
template <class K> struct MyPoint { };
template <class K> struct MyLine { };
template <class K> struct MyConstruct { };
template <class K> struct MyLess { };
struct Kernel {
typedef MyPoint<Kernel> Point_2;
typedef MyLine<Kernel> Line_2;
typedef MyConstruct<Kernel> Construct_line_2;
typedef MyLess<Kernel> Less_xy_2;
};
// Generate new Kernel
template <class K> struct NewPoint { };
template <class K> struct MyLeftTurn { };
struct New_kernel : public Kernel {
typedef NewPoint<New_kernel> Point_2;
typedef MyLeftTurn<New_kernel> Left_turn_2;
};
int main()
{
New_kernel::Point_2 p, q;
New_kernel::Construct_line_2 construct_line_2;
New_kernel::Line_2 l = construct_line_2(p, q);
return 0;
}
测试环境可以见: https://ideone.com/MrXCDD
编译错误为:
prog.cpp: In function ‘int main()’:
prog.cpp:28:49: error: no match for call to ‘(Kernel::Construct_line_2 {aka MyConstruct<Kernel>}) (New_kernel::Point_2&, New_kernel::Point_2&)’
New_kernel::Line_2 l = construct_line_2(p, q);
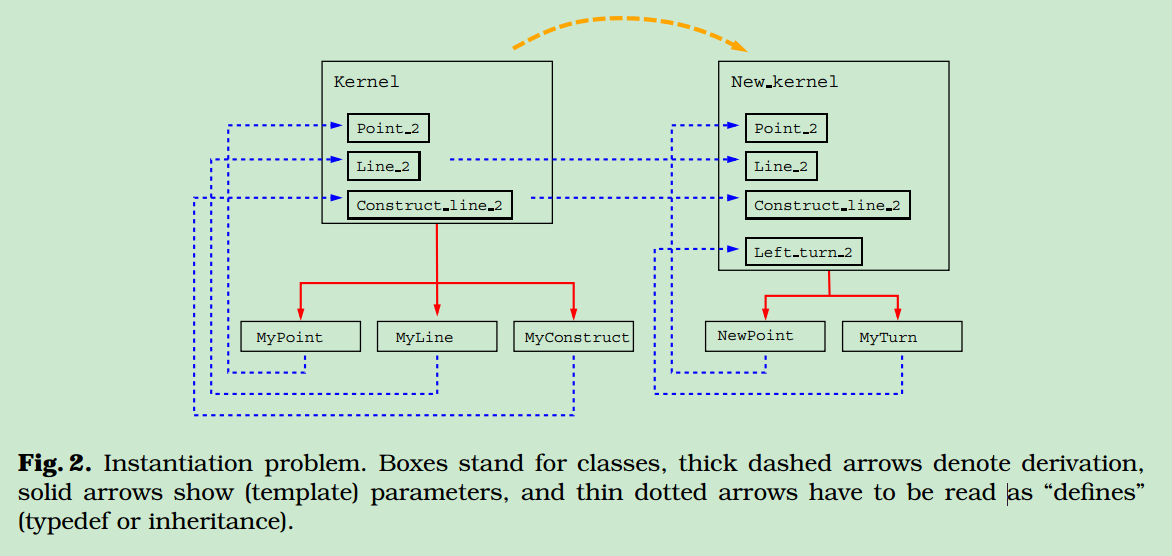
从编译错误中可见,New_kernel::Construct_line_2其实调用的是MyConstruct<Kernel>的实现,而我们想要的调用是MyConstruct<New_kernel>。依赖关系见下图:
这个版本中另一个隐含的问题是,循环引用的问题,具体如下:
template <class K> struct P {
typedef K::A B;
};
struct Kernel {
typedef P<Kernel>::B B;
typedef int A;
};
为了解决上面的问题,进行了第二版本的改进。
第二版本
为了降低不同Kernel之间的关联性,引入Kernel_base,具体如下:
template <class K> struct MyPoint { };
template <class K> struct MyLine { };
template <class K> struct MyConstruct { };
template <class K> struct MyLess { };
template <class K>
struct Kernel_base {
typedef MyPoint<K> Point_2;
typedef MyLine<K> Line_2;
typedef MyConstruct<K> Construct_line_2;
typedef MyLess<K> Less_xy_2;
};
struct Kernel : public Kernel_base<Kernel> { };
// Generate new Kernel
template <class K> struct NewPoint { };
template <class K> struct MyLeftTurn { };
template<class K>
struct New_kernel_base : public Kernel_base<K> {
typedef NewPoint<K> Point_2;
typedef MyLeftTurn<K> Left_turn_2;
};
struct New_kernel : public New_kernel_base<New_kernel> {};
int main()
{
New_kernel::Point_2 p, q;
New_kernel::Construct_line_2 construct_line_2;
New_kernel::Line_2 l = construct_line_2(p, q);
return 0;
}
测试环境可以见:https://ideone.com/40wOCa
编译错误如下:
prog.cpp: In function ‘int main()’:
prog.cpp:35:49: error: no match for call to ‘(Kernel_base<New_kernel>::Construct_line_2 {aka MyConstruct<New_kernel>}) (New_kernel_base<New_kernel>::Point_2&, New_kernel_base<New_kernel>::Point_2&)’
New_kernel::Line_2 l = construct_line_2(p, q);
^
从编译结果中可得,Construct_line_2对应的New_kernel正是我们所预期的。接下来需要解决的问题是,construct_line_2并不是可以调用的函数。调整后kernel之间的依赖关系如下:

第三版本
该版本中,利用函数对象来处理操作逻辑。
template <class K> struct MyPoint { };
template <class K> struct MyLine { };
template <class K> struct MyConstruct {
typedef typename K::Line_2 Line_2;
typedef typename K::Point_2 Point_2;
Line_2 operator() (Point_2, Point_2) const
{
return Line_2();
}
};
template <class K> struct MyLess {
typedef typename K::Point_2 Point_2;
bool operator() (Point_2, Point_2) const
{
return true;
}
};
template <class K>
struct Kernel_base {
typedef MyPoint<K> Point_2;
typedef MyLine<K> Line_2;
typedef MyConstruct<K> Construct_line_2;
typedef MyLess<K> Less_xy_2;
Construct_line_2 construct_line_2_object();
Less_xy_2 less_xy_2_object();
};
struct Kernel : public Kernel_base<Kernel> { };
// Generate new Kernel
template <class K> struct NewPoint { };
template <class K> struct MyLeftTurn { };
template<class K>
struct New_kernel_base : public Kernel_base<K> {
typedef NewPoint<K> Point_2;
typedef MyLeftTurn<K> Left_turn_2;
};
struct New_kernel : public New_kernel_base<New_kernel> {};
int main()
{
New_kernel::Point_2 p, q;
New_kernel::Construct_line_2 construct_line_2;
New_kernel::Line_2 l = construct_line_2(p, q);
return 0;
}
示例程序见:https://ideone.com/6ISelp
整个编译过程成功通过。
到此处,整个kernel的结构基本完善了。
Kernel使用示例说明算法的适应性
以2D点集凸包计算的实现来举例:https://doc.cgal.org/latest/Convex_hull_2/index.html。仅仅针对算法实现过程中Kernel的使用进行简单说明,对算法的具体实现此处不进行介绍。
// 暴露给外部调用的接口
template <class InputIterator, class OutputIterator>
inline
OutputIterator
ch_graham_andrew( InputIterator first,
InputIterator last,
OutputIterator result)
{
typedef std::iterator_traits<InputIterator> ITraits;
typedef typename ITraits::value_type value_type;
typedef CGAL::Kernel_traits<value_type> KTraits; // 根据value_type获取KernelTraits
typedef typename KTraits::Kernel Kernel; // 进一步获取Kernel
return ch_graham_andrew(first, last, result, Kernel()); // 传入Kernel,调用具体实现
}
// 具体实现
template <class InputIterator, class OutputIterator, class Traits>
OutputIterator
ch_graham_andrew( InputIterator first,
InputIterator last,
OutputIterator result,
const Traits& ch_traits)
{
typedef typename Traits::Point_2 Point_2; // 获取Kernel中的类型
typedef typename Traits::Equal_2 Equal_2; // 获取Kernel中的类型
Equal_2 equal_points = ch_traits.equal_2_object(); // 获取kernel中的算法
if (first == last) return result;
std::vector< Point_2 > V (first, last);
std::sort( V.begin(), V.end(), ch_traits.less_xy_2_object() ); // 获取Kernel中的算法
if (equal_points( *(V.begin()), *(V.rbegin())) )
{
*result++ = *(V.begin());
return result;
}
#if defined(CGAL_CH_NO_POSTCONDITIONS) || defined(CGAL_NO_POSTCONDITIONS) \
|| defined(NDEBUG)
OutputIterator res(result);
#else
Tee_for_output_iterator<OutputIterator,Point_2> res(result);
#endif // no postconditions ...
ch__ref_graham_andrew_scan( V.begin(), V.end(), res, ch_traits);
ch__ref_graham_andrew_scan( V.rbegin(), V.rend(), res, ch_traits);
CGAL_ch_postcondition( \
is_ccw_strongly_convex_2( res.output_so_far_begin(), \
res.output_so_far_end(), \
ch_traits));
CGAL_ch_expensive_postcondition( \
ch_brute_force_check_2( \
V.begin(), V.end(), \
res.output_so_far_begin(), res.output_so_far_end(), \
ch_traits));
#if defined(CGAL_CH_NO_POSTCONDITIONS) || defined(CGAL_NO_POSTCONDITIONS) \
|| defined(NDEBUG)
return res;
#else
return res.to_output_iterator();
#endif // no postconditions ...
}
从上面简单的示例可得,一般在算法构建的时候会在最外层生成调用接口,然后,在具体实现中,通过分别对Kernel中的数据结构和算法的调用,最后组装成一个完整的算法实现。
简单的完整的Kernel
此处将文章最后的示例代码贴出来,用于进一步完善对Kernel的认知。
//------------------------------------------------------------
// bottom layer: number type based function toolbox
//
template <class FT>
FT determinant2x2(FT a00, FT a01, FT a10, FT a11)
{
return a00*a11 - a10*a01;
}
template <class FT>
void line_from_pointsC2(FT px, FT py, FT qx, FT qy, FT &a, FT &b, FT &c) {}
//------------------------------------------------------------
// mid layer: representations, predicates and constructions
//
template <class K_>
struct Point_2 {
typedef K_ K;
typedef typename K::FT FT;
Point_2() {}
Point_2(FT x_, FT y_) : x(x_), y(y_) {}
FT x, y;
};
template <class K_>
struct Line_2 {
typedef K_ K;
typedef typename K::Point_2 Point_2;
Line_2() {}
Line_2(Point_2 p, Point_2 q) { *this = K::Construct_line_2(p,q); }
typename K::FT a, b, c;
};
template <class K_>
struct Segment_2 {
typedef K_ K;
typename K::Point_2 s, e;
};
template <class K_>
struct Less_xy_2 {
typedef typename K_::Point_2 Point_2;
bool operator()(Point_2 p, Point_2 q) const
{ return p.x < q.x || p.x == q.x && p.y < q.y; }
};
template <class K_>
struct Left_turn_2 {
typedef typename K_::Point_2 Point_2;
bool operator()(Point_2 p, Point_2 q, Point_2 r) const
{
return determinant2x2(q.x - p.x, q.y - p.y,
r.x - p.x, r.y - q.y) > 0;
}
};
template <class K_>
struct Construct_line_2 {
typedef typename K_::Point_2 Point_2;
typedef typename K_::Line_2 Line_2;
Line_2 operator()(Point_2 p, Point_2 q) const {
Line_2 l;
Line_from_pointsC2(p.x, p.y, q.x, q.y, l.a, l.b, l.c);
return l;
}
};
//------------------------------------------------------------
// top layer: geometric kernel
//
template <class K_, class FT_>
struct Kernel_bae {
typedef K_ K;
typedef FT_ FT;
typedef Point_2<K> Point_2;
typedef Line_2<K> Line_2;
typedef Segment_2<K> Segment_2;
typedef Less_xy_2<K> Less_xy_2;
typedef Left_turn_2<K> Left_turn_2;
typedef Construct_line_2<K> Construct_line_2;
Less_xy_2 less_xy_2_object() const { return Less_xy_2(); }
Left_turn_2 Left_turn_2_object() const { return Left_turn_2(); }
Construct_line_2 construct_line_2_object() const { return Construct_line_2(); }
};
template <class FT_>
struct Kernel : public Kernel_base<Kernel<FT_>, FT_>
{};
//------------------------------------------------------------
// convenience layer: global functions
//
template < class K >inline
bool
less_xy_2(typename K::Point_2 p,typename K::Point_2 q, K k = K())
{ returnk.less_xy_2_object()(p, q); }
template < class K >inline
bool
left_turn_2(typenameK::Point_2 p,
typenameK::Point_2 q,
typenameK::Point_2 r,
K k = K())
{ returnk.left_turn_2_object()(p, q, r); }
//------------------------------------------------------------
// enve more convenience: specializations for kernel
//
template < class FT > inline
bool
left_turn_2(Point_2< Kernel< FT > > p,
Point_2< Kernel< FT > > q,
Point_2< Kernel< FT > > r)
{ returnleft_turn_2(p, q, r, Kernel< FT >()); }
template < class FT >inline
bool
less_xy_2(Point_2< Kernel< FT > > p, Point_2< Kernel< FT > > q)
{ returnless_xy_2(p, q, Kernel< FT >()); }
参考
- [1] https://www.geeksforgeeks.org/curiously-recurring-template-pattern-crtp-2/
- [2] An Adaptable and Extensible Geometry Kernel https://inf.ethz.ch/~hoffmann/pub/hhkps-aegk-01a.pdf
读《An Adaptable and Extensible Geometry Kernel》的更多相关文章
- 读《移山之道——VSTS软件开发指南》
读<移山之道>这本书差不多用了一个星期的时间,感觉还是收获了一些知识的,以前只是会简单地编个小程序(虽然现在也是这样),但看过这本书之后我对软件开发这个概念的认识度有了从一片模糊到了解大体 ...
- 读《移山之道-VSTS软件开发指南》
首先,我选择<移山之道>有几个原因.第一,书的名字给我一种新鲜感,而不是像另外两本书那么平常:第二,作者邹欣是老师推荐的,看一看他的书或许能让我发现老师对他推崇备至的原因,而实际上,读完这 ...
- 开发之道——读《移山之道——VSTS开发之道》后感
开发之道——读<移山之道——VSTS开发之道>后感 <移山之道——VSTS开发之道>(下简称<移山之道>)是邹欣老师的另一本书.相传很有名的<构建之法> ...
- 《移山之道:VSTS软件开发指南》读书笔记
这两天看了<移山之道:VSTS软件开发指南>,对团队软件开发又有了新的认识.也许对于我们这些软件开发的新手来说,最重要的是具体技术与应用框架,但读了这本书后我感觉到,实际团队项目中工具的使 ...
- 《移山之道》Reading Task
老师布置的阅读任务虽然是附加的作业,但是对我来说是个很好的学习机会.软件工程主要是对工程的开发进行学习,毕竟在学校老师教了那么多的知识,我们课下做了那么多的练习并没有提高我们做一个工程的能力.一个项目 ...
- 《移山之道》第十一章:两人合作 读书笔记 PB16110698 第六周(~4.15)
本周在考虑阅读材料时,我翻阅了<移山之道>,正好看到这一章:两人合作,心想:正好,我们正值结对作业的紧要关头,书中两人合作的宝贵经验和教诲应当对我们有很大帮助.于是,我开始一边在ddl苦 ...
- 《移山之道》Reading Task——by12061154Joy
最近因为作业的原因所以接触到了这本书,给我最特别的感觉就是很新鲜,主要是因为这本书是以故事展开的,大概是我读的书太少,基本没有看到过专业书的知识体系是用故事串讲起来的,这样帮助读者理解了一些概念并且不 ...
- Pairproject 移山之道 阅读随笔和一些问题
首先不得不承认这本书的写作方式很独特,不像其他的计算机类的图书那样枯燥,让人读起来感觉很有意思,他也颠覆了我对计算机类图书的看法,这种写作方式值得我们学习. 先谈谈收获吧.读了两年大学,这是第一次写类 ...
- Some questions after Reading 《移山之道》
很少见到用故事的形式来写技术书籍的,这是我看到的第一本,书写得比较有趣,看了之后也是有一定的收获. 作者在此书中旁征博引,引用的东西虽不能一个一个查询是否正确,但是每次读到时候,感觉一种现代的软件工 ...
- 一个项目经理对主流项目管理工具的对比:禅道VS华为软件开发云
禅道与软件开发云对比分析报告 1. 产品介绍 禅道是易软天创出品的一款项目管理软件,集产品管理.项目管理.测试管理.文档管理.组织管理于一体,覆盖了项目管理和测试管理的核心流程. 华为软件开发云 (D ...
随机推荐
- Word Break II 求把字符串拆分为字典里的单词的全部方案 @LeetCode
这道题相似 Word Break 推断能否把字符串拆分为字典里的单词 @LeetCode 只不过要求计算的并不不过能否拆分,而是要求出全部的拆分方案. 因此用递归. 可是直接递归做会超时,原因是Le ...
- Linux系统调用过程分析
參考: <Linux内核设计与实现> 0 摘要 linux的系统调用过程: 层次例如以下: 用户程序------>C库(即API):INT 0x80 ----->system_ ...
- 系统的BIOS与系统安装
今天偶尔看到个介绍电脑BIOS的与各种本子安装系统的介绍:(记录一下) 网络地址:http://blog.sina.com.cn/s/blog_4a1faae60102dyek.html
- hbase shell经常使用命令
hbase经常使用命令 /usr/local/cloud/hbase/bin/hbase shell 用shell来连接hbase exit 退出hbase shell version 查看hbase ...
- 2013级C++第12周(春)项目——成员的訪问属性、多重继承
课程首页在:http://blog.csdn.net/sxhelijian/article/details/11890759,内有完整教学方案及资源链接 第一部分 程序阅读 1.阅读程序.分析类中成员 ...
- BestCoder Round #56/hdu5463 Clarke and minecraft 水题
Clarke and minecraft 问题描述 克拉克是一名人格分裂患者.某一天,克拉克分裂成了一个游戏玩家,玩起了minecraft.渐渐地,克拉克建起了一座城堡. 有一天,克拉克为了让更多的人 ...
- struts 模块化
<struts> <!-- 包含了三个配置文件 --> <!-- 不指定路径默认在src下时的方式 --> <include file="strut ...
- caioj1472: 后缀自动机1:多个串的LCS
子串母串跑合并答案 一个点的fail的dep是比任意一条根到这个点路径长度要小的. 那么改就可以直接来了. #include<cstdio> #include<iostream> ...
- GeHost powershell
PS C:\Users\clu\Desktop> [System.Net.Dns] | Get-Member -Static | Format-Table -AutoSize TypeName: ...
- XAML实例教程系列 - 标记扩展(Markup Extensions) 六
XAML实例教程系列 - 标记扩展(Markup Extensions) 分类: Windows 8 Silverlight2012-06-21 13:00 1139人阅读 评论(0) 收藏 举报 扩 ...