彩色MT9V034摄像头 Bayer转rgb FPGA实现
1 图像bayer格式介绍
bayer格式是伊士曼·柯达公司科学家Bryce Bayer发明的,Bryce Bayer所发明的拜耳阵列被广泛运用数字图像。Bayer格式是相机内部的原始数据, 一般后缀名为.raw。
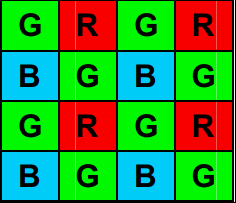
对于彩色图像,一般是三原色数据,rgb格式。但是摄像头一个像素点只有rgb中一种数据(下图为bayer色彩滤波阵列)。但是有很多摄像头直接输出rgb和yuv格式,如ov5640、ov7725等等,这是因为在Sensor模组的内部会有一个ISP模块,会将 Sensor采集到的数据进行插值和特效处理,所以直接输出彩色图像。但不是所有的摄像头都集成ISP,而直接输出Bayer数据,这就需要自己写Bayer转rgb算法。
2 MT9V034简单介绍
做图像处理的朋友都知道,MT9V034是一款十分出色的做机器视觉的摄像头,一般都是灰度的。但是也有彩色款,当时我觉得灰度的效果那么好,一时头热就买一个彩色款的。mt9v034用起来很方便,可以不用寄存器配置,上电默认752*480分辨率。根据需求也可以iic配置。
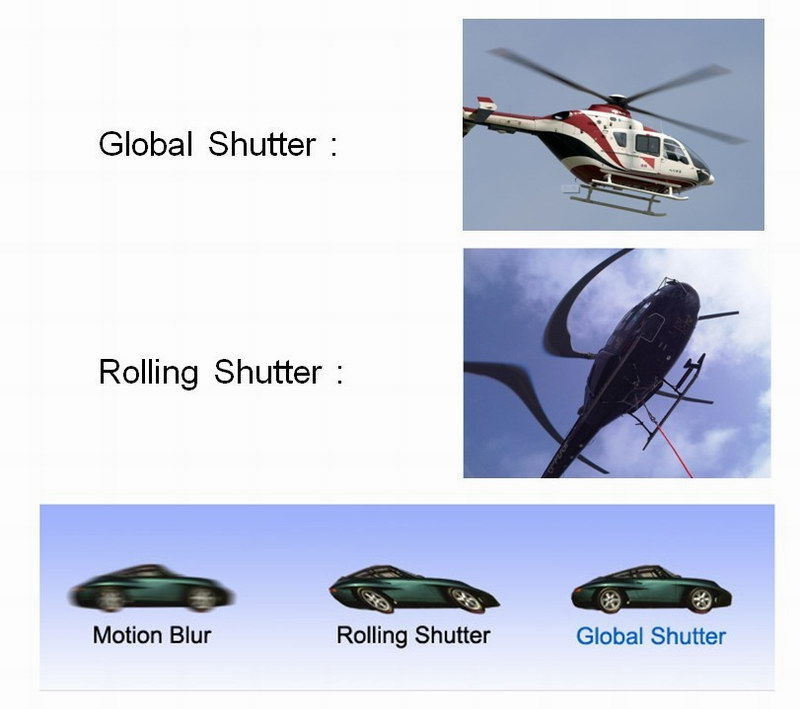
全局快门(相对滚动快门) 拍摄高速物体的效果:
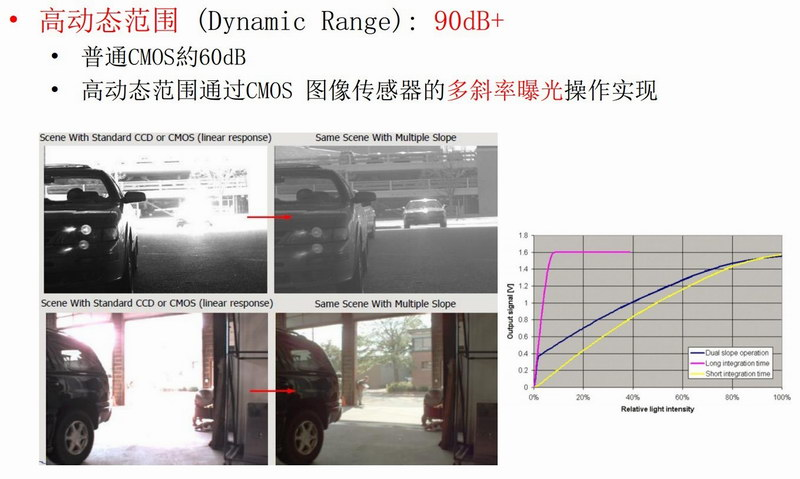
高动态效果:
3 MT9V034 datasheet 简单解析
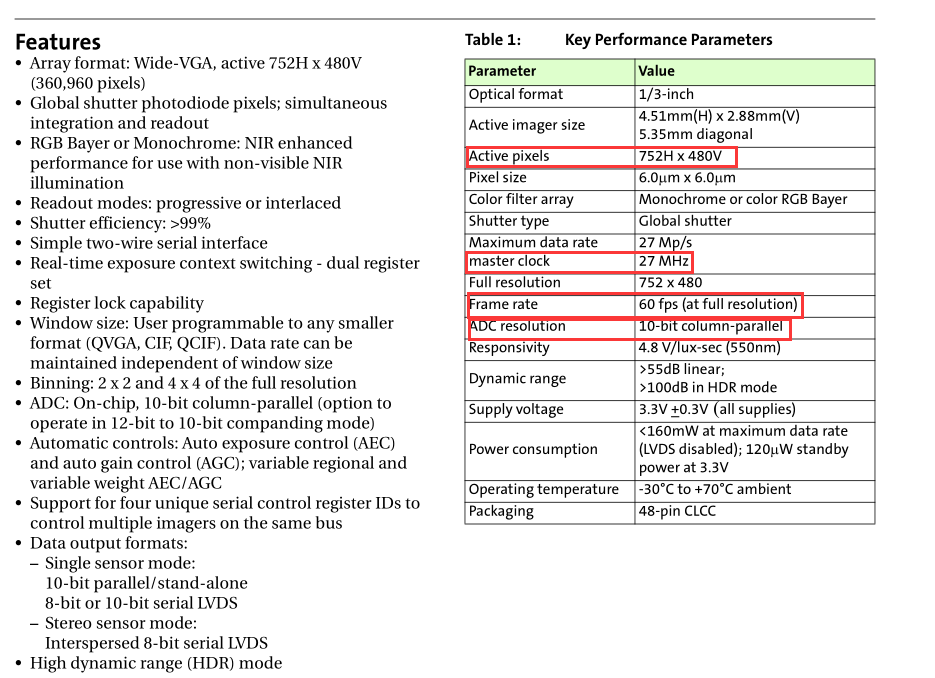
1)有效图像 752x480
最大时钟为27Mhz
最大帧率为60fps
10位的adc(我的是八位的输出,店家只将高8位引出,有点影响最后图像的精度)
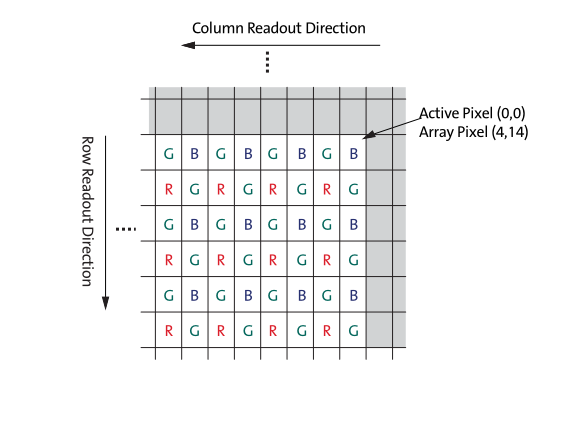
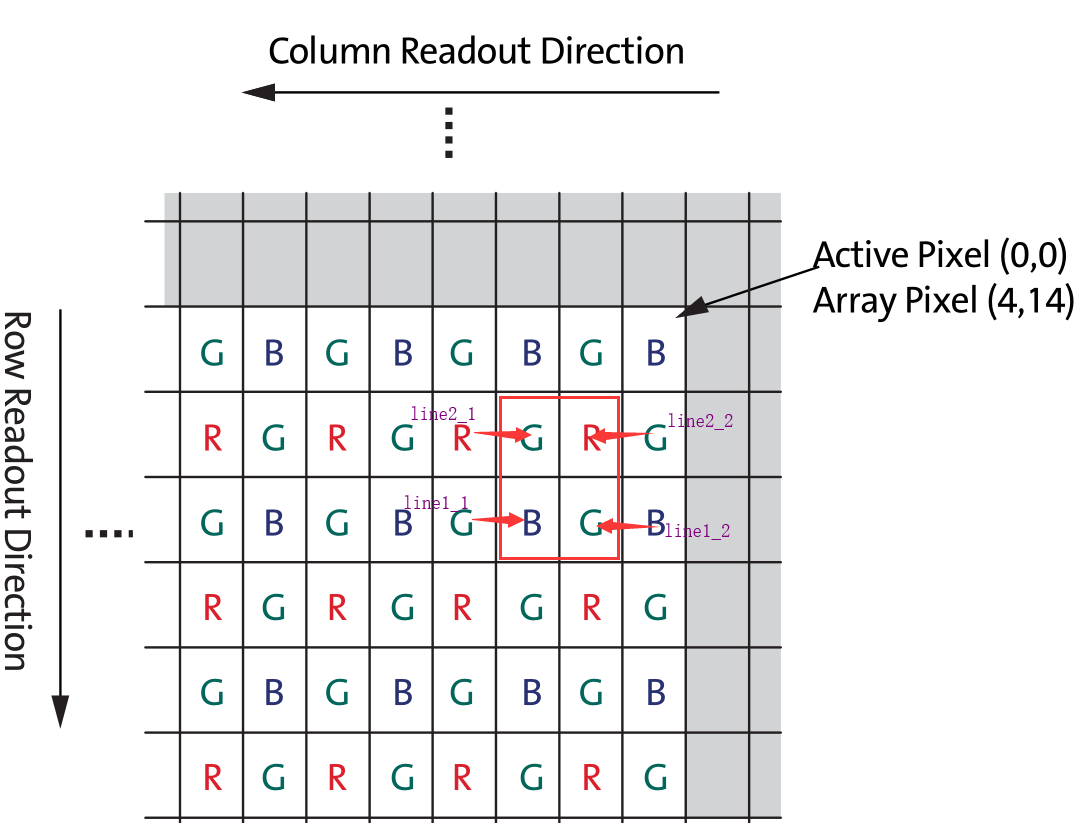
2)这是mt9v034Bayer阵列,注意输出方向,从左到右,从上到下。
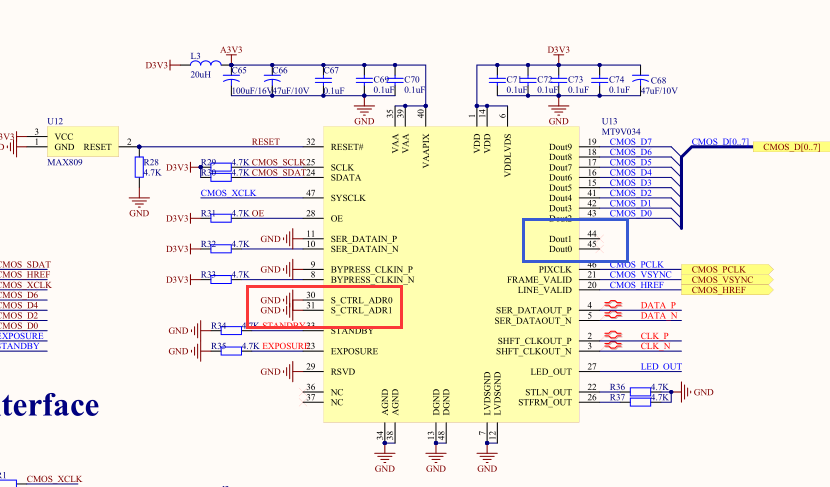
3)摄像头ID号要根据 S_CTRL_ADR1, S_CTRL_ADR0这两个引脚咋连接的

4)下图是摄像头原理图,很明显S_CTRL_ADR1, S_CTRL_ADR0是被拉低了,所以摄像头ID为0x90.上面说到摄像头只有高8位被引出,在这里可以证实了。
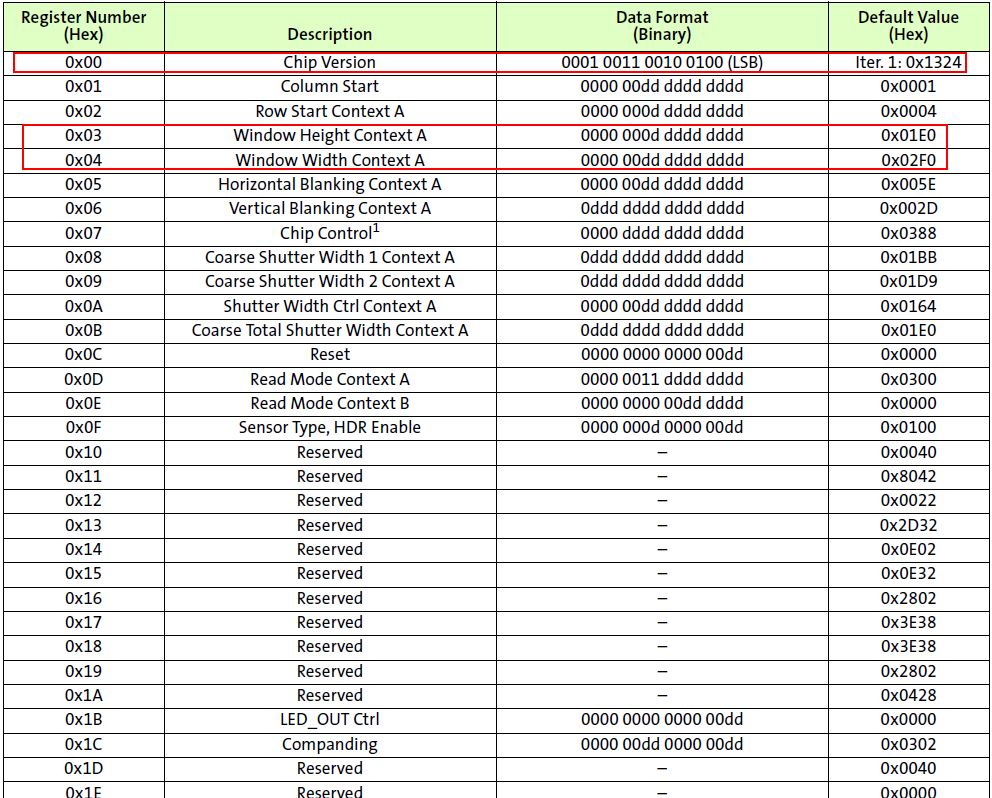
5)下面是大部分寄存器,mt9v034可配置的寄存器很少。0x00是芯片版本。03、04是摄像头分辨率
6)datasheet就介绍到这里,更多信息可以自己去阅读。
4 Bayer转rgb算法解析
我是用shift register ip 缓存两行数据,形成2*2窗口(这是FPGA做图像算法最常用的方法和ip),不是很会的朋友可以百度搜一搜,有很多博客可以学习,一定要自己仿真一下,搞明白,这有点难理解。
根据窗口移动,不难发现,总结出一条重要的规律:总共只有四种窗口,而且与行和列的奇偶有关。
假设计数器从零开始记数:
第一种{行偶,列偶}
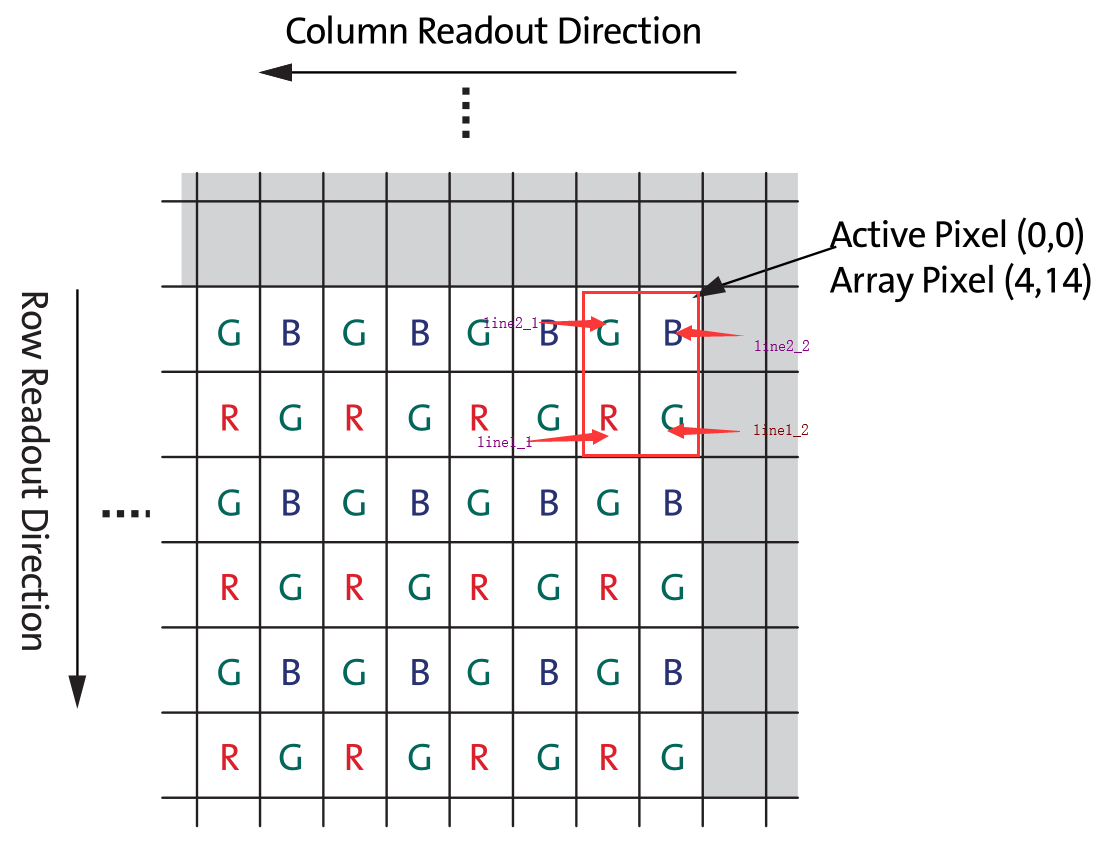
第二种{行偶,列奇}
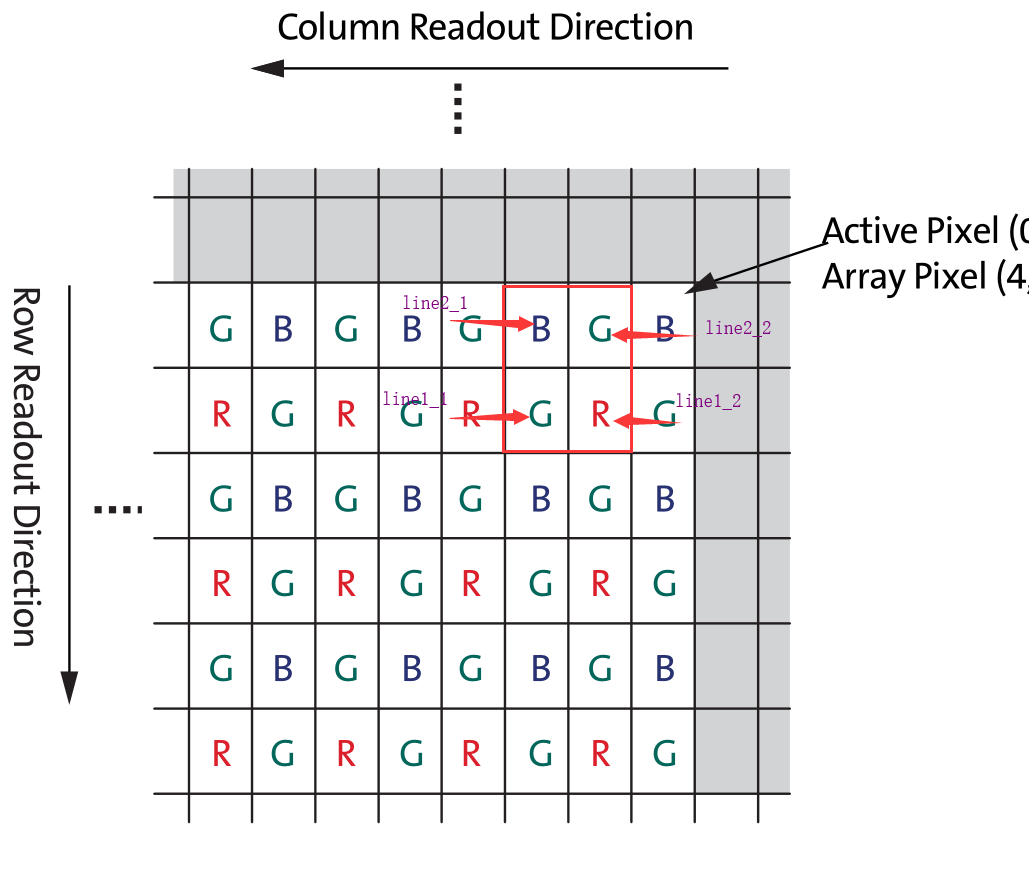
第三种{行奇,列偶}

第四种{行奇,列奇}
5 算法实现
首先说明我是用xilinx的zynq fpga,altera的也有类似的ip。我直接说明一下ip 参数修改,其他的怎么添加ip什么的我就不讲了,不会的自己百度学习。
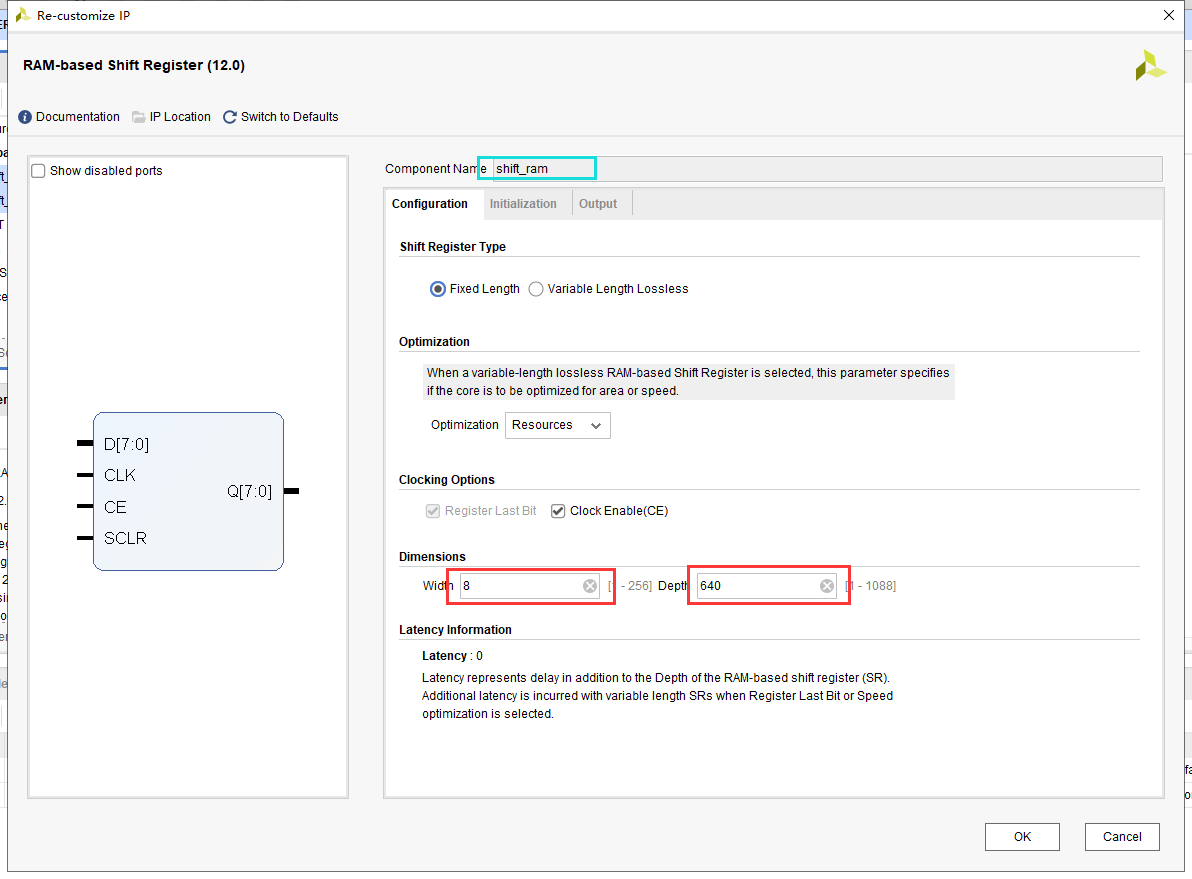
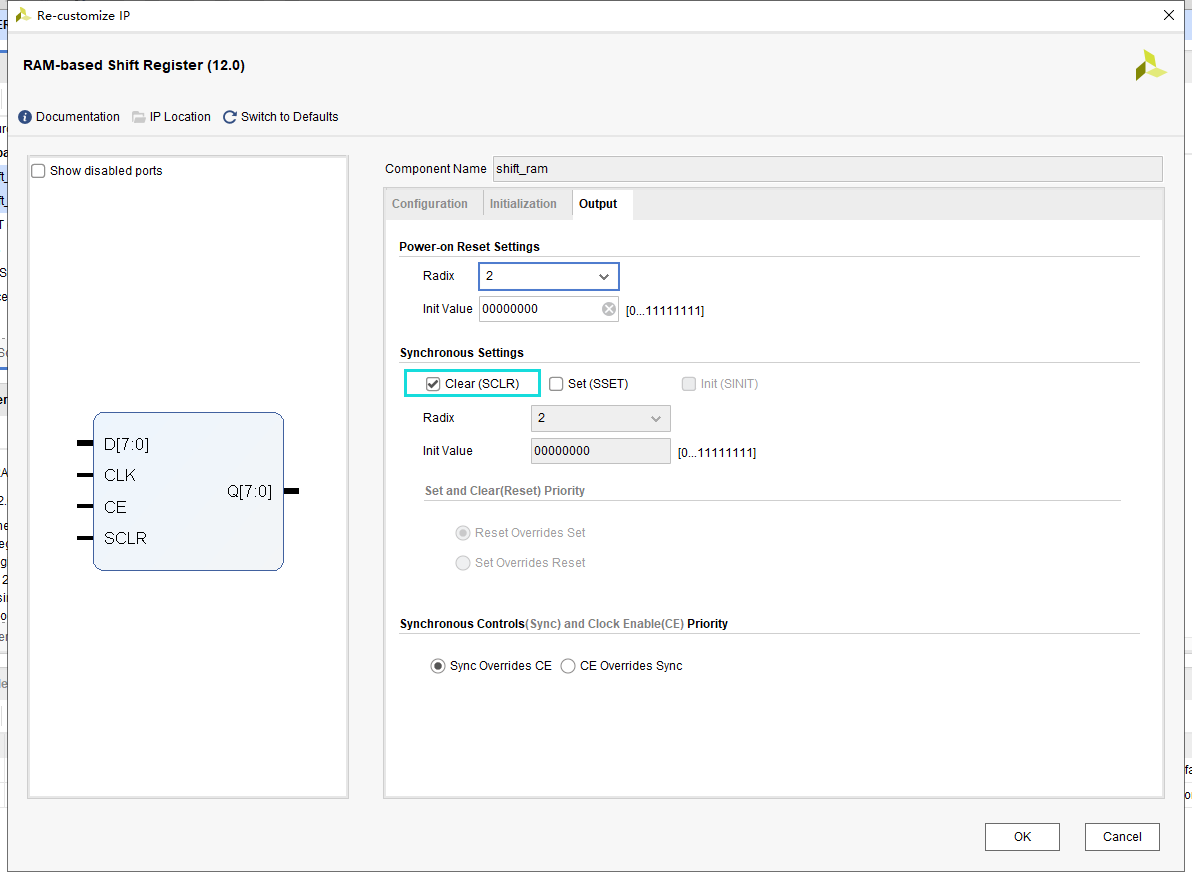
1)这是ip首页,蓝框自定义ip名,修改一下红框的参数,我们是8位数据,一行数据为640个。clock enable端与sclr端可以根据自己的要求决定勾不勾选。其他默认就行,点击ok可以了。
2)vivado也提供端口例化模板,如下图操作就行,

3)源码
用两个shift register ip形成2*2的窗口,代码就不具体解说了,自己仿真一下结合源码理解吧。
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2019/02/04 10:29:56
// Design Name: colour MT98V034 bayer2rgb
// Module Name: MT_bayer2rgb
// Project Name: Colour_MT_bayer2rgb
// Target Devices: ZYNQ7020
// Tool Versions: vivado2018.3
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
////////////////////////////////////////////////////////////////////////////////// module MT_bayer2rgb(
//system singal
input s_rst_n ,
//cmos simgals
input vsync_i ,
input hsync_i ,
input pclk ,
input [:] bayer_data ,
//输出
output vsync_o ,
output hsync_o ,
output [:] rgb_data
); //========================================================================\
// =========== Define Parameter and Internal signals ===========
//========================================================================/ reg [:] col_cnt ;
reg [:] row_cnt ; reg hsync_i_1 ;
reg hsync_i_2 ;
reg hsync_i_3 ; reg vsync_i_1 ;
reg vsync_i_2 ;
reg vsync_i_3 ; wire [:] line_1 ;
wire [:] line_2 ;
reg [:] data_control ; reg [:] line1_1 ;
reg [:] line1_2 ; reg [:] line2_1 ;
reg [:] line2_2 ; reg [:] rgb_r ;
reg [:] rgb_g ;
reg [:] rgb_b ;
//=============================================================================
//**************************** Main Code *******************************
//============================================================================= //列计数
always @ (negedge pclk or negedge s_rst_n) begin
if(s_rst_n == 'b0)
col_cnt <= 'd0;
else if (hsync_i_3 == 'b1 && hsync_i_2 == 1'b1)
col_cnt <= col_cnt + 'b1;
else
col_cnt <= 'd0;
end always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 'b0) begin
hsync_i_1 <= 'b0;
hsync_i_2 <= 'b0;
hsync_i_3 <= 'b0;
end
else begin
hsync_i_1 <= hsync_i;
hsync_i_2 <= hsync_i_1;
hsync_i_3 <= hsync_i_2;
end
end always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 'b0) begin
vsync_i_1 <= 'b0;
vsync_i_2 <= 'b0;
vsync_i_3 <= 'b0;
end
else begin
vsync_i_1 <= vsync_i;
vsync_i_2 <= vsync_i_1;
vsync_i_3 <= vsync_i_2;
end
end //行计数
always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 'b0)
row_cnt <= 'd0;
else if(~hsync_i && hsync_i_1)
row_cnt <= row_cnt + 'b1;
else if (~vsync_i && vsync_i_1)
row_cnt <= 'd0;
end //data_control
always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 'b0)
data_control <= 'b100;
else if (hsync_i_2 == 'b1 && hsync_i_1 == 1'b1)
data_control <= {'b0,row_cnt[0],~col_cnt[0]};
else
data_control <= 'b100;
end shift_ram shift_ram_1 (
.D (bayer_data ), // input wire [7 : 0] D
.CLK (pclk ), // input wire CLK
.CE (hsync_i ), // input wire CE
.SCLR (~s_rst_n ), // input wire SCLR
.Q (line_1 ) // output wire [7 : 0] Q
); shift_ram shift_ram_2 (
.D (line_1 ), // input wire [7 : 0] D
.CLK (pclk ), // input wire CLK
.CE (hsync_i ), // input wire CE
.SCLR (~s_rst_n ), // input wire SCLR
.Q (line_2 ) // output wire [7 : 0] Q
); always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 'b0) begin
line1_1 <= 'd0;
line1_2 <= 'd0; line2_1 <= 'd0;
line2_2 <= 'd0;
end
else begin
line1_1 <= line_1;
line1_2 <= line1_1; line2_1 <= line_2;
line2_2 <= line2_1;
end end always @ (data_control) begin
case(data_control)
'b000 : begin
rgb_r = line1_1;
rgb_g = line2_1 + line1_2;
rgb_b = line2_2;
end
'b001 : begin
rgb_r = line1_2;
rgb_g = line1_1 + line2_2;
rgb_b = line2_1;
end
'b010 : begin
rgb_r = line2_1;
rgb_g = line1_1 + line2_2;
rgb_b = line1_2;
end
'b011 : begin
rgb_r = line2_2;
rgb_g = line2_1 + line1_2;
rgb_b = line1_1;
end
default: begin
rgb_r = 'd0;
rgb_g = 'd0;
rgb_b = 'd0;
end
endcase
end assign rgb_data = {rgb_r,rgb_g[:],rgb_b};
assign vsync_o = vsync_i_3;
assign hsync_o = hsync_i_3;
endmodule
4)最后欣赏一下效果 ,效果还不错,继承了灰度款的优良性能。


最后说明一下,最后分辨率改为640*480,但是发现480指的是0~480,所以行计数器在481清零。我是用的zynq,所以没进行iic硬件配置,用的是ps端arm的 iic接口做的。如果用默认的分辨率就需要修改一下ip的深度和行计数器的清零的数值就行了。说到仿真,vivado自带的仿真器还是没有modelsim好,但是modelsim仿真含有vivado ip的工程时,很麻烦,独立仿真更不行,ip仿真的源文件不好添加,联合仿真操作有点繁琐,这里呢先不讲,我下次再另外写一篇博客总结一下。
彩色MT9V034摄像头 Bayer转rgb FPGA实现的更多相关文章
- 图像处理之基础---yuv420及其rgb,bayer, yuv, RGB的相互转换详解
YUV格式解析1(播放器——project2) 根据板卡api设计实现yuv420格式的视频播放器 打开*.mp4;*.264类型的文件,实现其播放. 使用的视频格式是YUV420格式 YUV格式 ...
- QT 实现彩色图亮度均衡,RGB和HSI空间互相转换
从昨天折腾到今天.再折腾下去我都要上主楼了 大致和灰度图均衡是一样的,主要是不能像平滑什么的直接对R,G,B三个分量进行.这样出来的图像时没法看的.因此我们要对亮度进行均衡.而HSI彩色空间中的分量 ...
- bayer, yuv, RGB转换方法
因为我的STVxxx USB camera输出格式是bayer格式,手头上只有YUVTOOLS这个查看工具,没法验证STVxxx在开发板上是否正常工作. 网上找了很久也没找到格式转换工具,最后放弃了, ...
- 图像处理之基础---彩色转灰度算法优化rgb to yuv
File: StudyRGB2Gray.txtName: 彩色转灰度算法彻底学习Author: zyl910Version: V1.0Updata: 2006-5- ...
- 【VS开发】【图像处理】 bayer, yuv, RGB转换方法
因为我的STVxxx USB camera输出格式是bayer格式,手头上只有YUVTOOLS这个查看工具,没法验证STVxxx在开发板上是否正常工作. 网上找了很久也没找到格式转换工具,最后放弃了, ...
- ov5640摄像头设备驱动
http://www.cnblogs.com/firege/p/5806121.html (驱动大神) http://blog.csdn.net/yanbixing123/article/detai ...
- 31全志r58平台Android4.4.2下打开USB摄像头
31全志r58平台Android4.4.2下打开USB摄像头 2018/10/26 16:00 版本:V1.0 开发板:SC5806 1.系统编译:(略) 2.需要修改的文件: W:\r58_andr ...
- C语言实现将彩色BMP位图转化为二值图
CTF做了图片的隐写题,还没有形成系统的认识,先来总结一下BMP图的组成,并通过将彩色图转为二值图的例子加深下理解. 只写了位图二进制文件的格式和代码实现,至于诸如RGB色彩和调色板是什么的一些概念就 ...
- bayer转dng实现过程记录
前言 项目中需要将imx185出来的raw数据转成dng格式,一开始认为很简单的事情,后面才发现还是挺复杂的!!!首先考虑的是不写任何代码,直接用adobe提供的转换工具来转,结果发现,不仅是adob ...
随机推荐
- 自己定义ViewpagerIndicator (仿猫眼,加入边缘回弹滚动效果)
一.概述 今天主要来分享个自己定义viewpagerindicator.效果主要是仿 猫眼电影 顶部的栏目切换.也就是我们常说的indicator,难度简单,为了让滑动时效果更炫酷,我在滑动到左边第一 ...
- Android应用程序无法读写USB设备的解决方法
假设android系统中的API或者apk无法读写usb设备.可能是没有加入读写usb的权限,须要依照例如以下方法进行设置: 1. 在android.hardware.usb.host.xml文件里加 ...
- 分布式软件体系结构风格(C/S,B/S)
分布式软件体系结构风格 1. 三层C/S结构 2. 三层B/S结构 了解很多其它软件体系结构 三层C/S结构(3-Tier C/S Architecture) §第1层:用户界面GUI-表示层-- ...
- JpGraph中文乱码问题解决
JpGraph是一个PHP的图形类库,可以方便地生成各种柱状图,饼图,折线图等等,而且还可以方便地加文字.但是,中文的情况就稍微麻烦了一点.在JpGraph中默认是要把字符串转成utf8的,但是如果你 ...
- debian网络静态ip配置
本配置适合于服务器上的静态ip配置,该方法简单可靠. 1 临时配置 ifconfig eth0 192.168.1.97 netmask 255.255.255.0 broadcast 192.168 ...
- Android CountDownTimer的使用
官方提供的用法如下: new CountDownTimer(30000, 1000) { public void onTick(long millisUntilFinished) { mTextFie ...
- 第一章、Tiny4412 U-BOOT移植一 说明【转】
本文转载自:http://blog.csdn.net/eshing/article/details/37520291 一.移植前说明: 1. 特别声明:此文档是我的学习文档,里面肯定有错误地方,仅供 ...
- [Swift通天遁地]三、手势与图表-(11)制作雷达图表更加形象表示各个维度的情况
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★➤微信公众号:山青咏芝(shanqingyongzhi)➤博客园地址:山青咏芝(https://www.cnblogs. ...
- javascript中for...in和for...of的区别
for...of循环是ES6引入的新的语法. for...in遍历拿到的x是键(下标).而for...of遍历拿到的x是值,但在对象中会提示不是一个迭代器报错.例子如下: let x; let a = ...
- phonegap在eclipse上的安装
1.首先安装好eclipse 2.下载安装好sdk 3.下载安装好adt 4.在这个地方下载好phonegap的包,https://codeload.github.com/phonegap/phone ...