机器人中的轨迹规划(Trajectory Planning )

Figure. Several possible path shapes for a single joint
五次多项式曲线(quintic polynomial)
$$\theta(t)=a_0+a_1t+a_2t^2+a_3t^3+a_4t^4+a_5t^5$$
考虑边界条件:
$$\begin{align*}
\theta_0&=a_0\\
\theta_f&=a_0+a_1t+a_2{t_f}^2+a_3{t_f}^3+a_4{t_f}^4+a_5{t_f}^5\\
\dot{\theta_0}&=a_1\\
\dot{\theta_f}&=a_1+2a_2t_f+3a_3{t_f}^2+4a_4{t_f}^3+5a_5{t_f}^4\\
\ddot{\theta_0}&=2a_2\\
\ddot{\theta_f}&=2a_2+6a_3{t_f}+12a_4{t_f}^2+20a_5{t_f}^3\\
\end{align*}$$
这6组约束构成了一个6个未知数的线性方程组,可以求出系数为:
$$\begin{align*}
a_0&=\theta_0\\
a_1&=\dot{\theta_0}\\
a_2&=\frac{\ddot{\theta_0}}{2}\\
a_3&=\frac{20\theta_f-20\theta_0-(8\dot{\theta_f}+12\dot{\theta_0})t_f-(3\ddot{\theta_0}-\ddot{\theta_f}){t_f}^2}{2{t_f}^3}\\
a_4&=\frac{30\theta_0-30\theta_f+(14\dot{\theta_f}+16\dot{\theta_0})t_f+(3\ddot{\theta_0}-2\ddot{\theta_f}){t_f}^2}{2{t_f}^4}\\
a_5&=\frac{12\theta_f-12\theta_0-(6\dot{\theta_f}+6\dot{\theta_0})t_f-(\ddot{\theta_0}-\ddot{\theta_f}){t_f}^2}{2{t_f}^5}
\end{align*}$$
在MATLAB机器人工具箱中函数tpoly可以用于计算并生成机器人单轴的五次多项式轨迹曲线。当$t \in [0,T]$时,五次多项式曲线以及其一阶导数、二阶导数都是连续光滑的多项式曲线:
$$\begin{align*}
S(t)&=At^5+Bt^4+Ct^3+Dt^2+Et+F\\
\dot{S}(t)&=5At^4+4Bt^3+3Ct^2+2Dt+E\\
\ddot{S}(t)&=20At^3+12Bt^2+6Ct+2D
\end{align*}$$
根据约束条件

可以写出矩阵方程如下:

利用MATLAB提供的左除(反除)操作符,可以方便的求解线性方程组:Ax=b → x=A\b(表示矩阵A的逆乘以b)
tpoly.m主要内容如下:
%TPOLY Generate scalar polynomial trajectory % [S,SD,SDD] = TPOLY(S0, SF, T, SD0, SDF) as above but specifies initial
% and final joint velocity for the trajectory and time vector T. function [s,sd,sdd] = tpoly(q0, qf, t, qd0, qdf) if isscalar(t)
t = (:t-)';
else
t = t(:);
end
if nargin <
qd0 = ;
end
if nargin <
qdf = ;
end tf = max(t);
% solve for the polynomial coefficients using least squares
X = [ tf^ tf^ tf^ tf^ tf *tf^ *tf^ *tf^ *tf *tf^ *tf^ *tf
];
coeffs = (X \ [q0 qf qd0 qdf ]')'; % coefficients of derivatives
coeffs_d = coeffs(:) .* (:-:);
coeffs_dd = coeffs_d(:) .* (:-:); % evaluate the polynomials
p = polyval(coeffs, t);
pd = polyval(coeffs_d, t);
pdd = polyval(coeffs_dd, t);
在MATLAB中输入下面命令生成从位置0运动到1的五次多项式曲线(时间步数为50步):
>> [s, sd, sdd] = tpoly(, , );
其位置、速度、加速度曲线如下图所示:
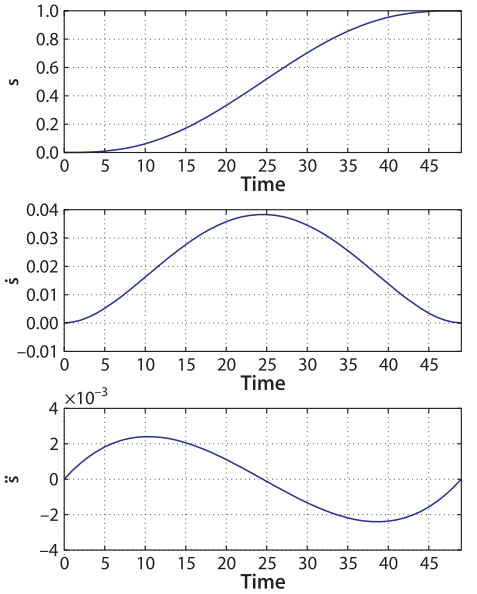
虽然这三条曲线都是连续且光滑的,但却存在一个很实际的问题。从速图曲线中可以看出在t=25时速度达到最大值,没有匀速段,其它时刻速度都小于最大值。平均速度除以最大速度的值为:mean(sd) / max(sd) = 0.5231,即平均速度只有最大速度的一半左右,速度利用率较低。对于大多数实际伺服系统,电机的最大速度一般是固定的,因此希望速度曲线在最大速度的时间尽可能长。
梯形速度曲线 / Linear segment with parabolic blend (LSPB) trajectory
高次多项式轨迹曲线的计算量比较大,我们也可以考虑用直线段来构造简单的轨迹曲线,但是在不同直线段的交接处会发生速度跳变的情况(位移曲线不光滑),如果用抛物线(parabolic blend)进行拼接就可以得到光滑的轨迹。如下图所示,单轴从$t_0$开始匀加速运动(位移曲线为抛物线);$t_b$时刻达到最大速度,进行匀速直线运动(位移曲线为直线段);从$t_f-t_b$时刻开始进行匀减速运动,$t_f$时刻减速为零并到达目标位置。曲线关于时间中点$t_h$对称,由于这种轨迹的速度曲线是梯形的,因此也称为梯形速度(trapezoidal velocity trajectory)曲线,在电机驱动器中被广泛使用。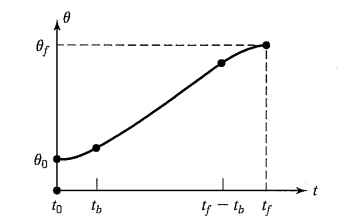
Figure. Linear segment with parabolic blends
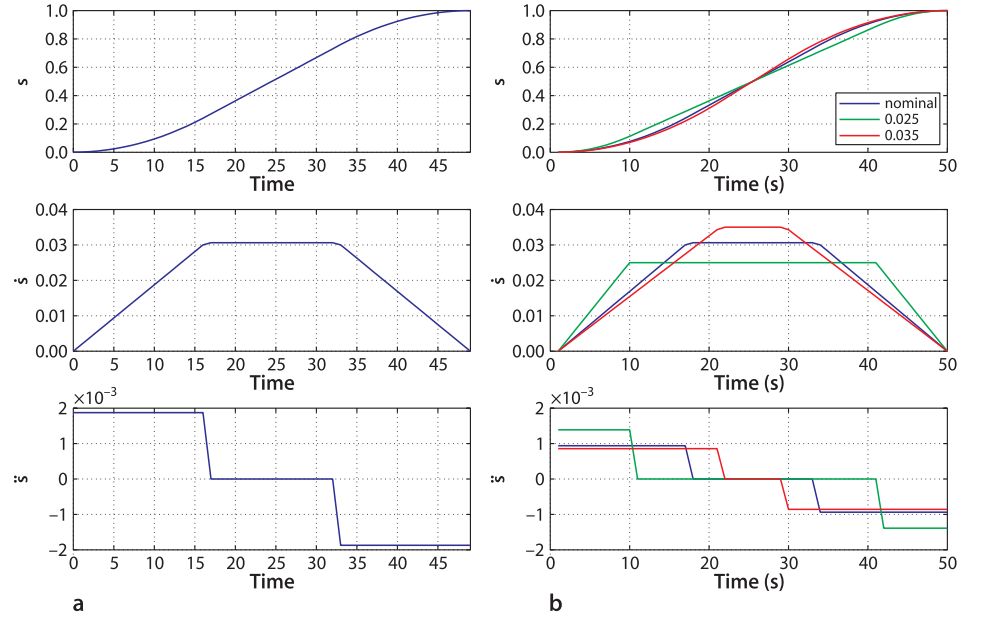
MATLAB机器人工具箱中函数lspb可以用于计算并生成梯形速度曲线,下面的命令生成从位置0运动到1的梯形速度轨迹曲线,时间步数为50步,最大速度为默认值:
>> [s, sd, sdd] = lspb(0, 1, 50);
另外也可以指定最大速度(In fact the velocity cannot be chosen arbitrarily, too high or toolow a value for the maximum velocity will result in an infeasible trajectory ):
>> s = lspb(0, 1, 50, 0.025);
>> s = lspb(0, 1, 50, 0.035);
下图a是默认最大速度的曲线,图b是指定不同速度的对比。
lspb.m的主要内容如下:
%LSPB Linear segment with parabolic blend
%
% [S,SD,SDD] = LSPB(S0, SF, M) is a scalar trajectory (Mx1) that varies
% smoothly from S0 to SF in M steps using a constant velocity segment and
% parabolic blends (a trapezoidal velocity profile). Velocity and
% acceleration can be optionally returned as SD (Mx1) and SDD (Mx1)
% respectively.
%
% [S,SD,SDD] = LSPB(S0, SF, M, V) as above but specifies the velocity of
% the linear segment which is normally computed automatically. function [s,sd,sdd] = lspb(q0, q1, t, V) if isscalar(t)
t = (:t-)';
else
t = t(:);
end tf = max(t(:)); if nargin <
% if velocity not specified, compute it
V = (q1-q0)/tf * 1.5;
else
V = abs(V) * sign(q1-q0); % 判断实际速度符号
if abs(V) < abs(q1-q0)/tf
error('V too small');
elseif abs(V) > *abs(q1-q0)/tf
error('V too big');
end
end if q0 == q1 % 目标位置和起始位置相同
s = ones(size(t)) * q0;
sd = zeros(size(t));
sdd = zeros(size(t));
return
end tb = (q0 - q1 + V*tf)/V; % 计算匀加减速段时间
a = V/tb; s = zeros(length(t), );
sd = s;
sdd = s; for i = :length(t)
tt = t(i); if tt <= tb % 匀加速段
% initial blend
s(i) = q0 + a/*tt^;
sd(i) = a*tt;
sdd(i) = a;
elseif tt <= (tf-tb) % 匀速段
% linear motion
s(i) = (q1+q0-V*tf)/ + V*tt;
sd(i) = V;
sdd(i) =
else % 匀减速段
% final blend
s(i) = q1 - a/*tf^ + a*tf*tt - a/*tt^;
sd(i) = a*tf - a*tt;
sdd(i) = -a;
end
end
多自由度轨迹规划
机器人工具箱中的函数mtraj可以在内部调用单自由度轨迹生成函数,来生成多个轴的运动轨迹。mtraj第一个参数为单自由度轨迹生成函数的句柄,q0和qf分别为起始和目标点的坐标(是一个多维向量)。
function [S,Sd,Sdd] = mtraj(tfunc, q0, qf, M)
if ~isa(tfunc, 'function_handle')
error('first argument must be a function handle');
end
M0 = M;
if ~isscalar(M)
M = length(M);
end
if numcols(q0) ~= numcols(qf)
error('must be same number of columns in q0 and qf')
end
s = zeros(M, numcols(q0));
sd = zeros(M, numcols(q0));
sdd = zeros(M, numcols(q0));
for i=:numcols(q0)
% for each axis
[s(:,i),sd(:,i),sdd(:,i)] = tfunc(q0(i), qf(i), M);
end
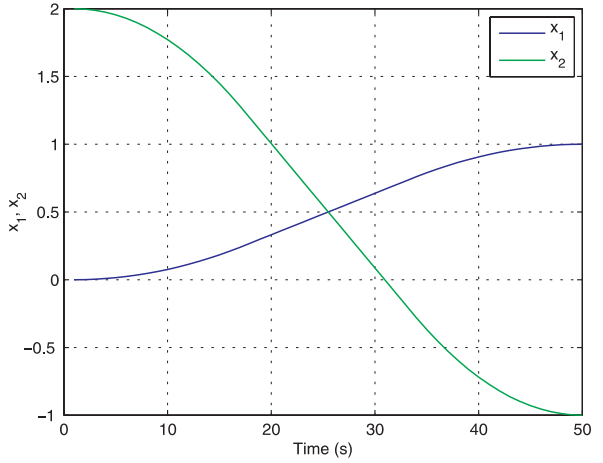
mtraj可以调用tpoly或lspb,在50步内生成从(0, 2)运动到(1, -1)的轨迹。返回值x是一个50×2的矩阵,每一列代表一个轴的数据,每一行代表一个时间点。
>> x = mtraj(@tpoly, [0 2], [1 -1], 50);
>> x = mtraj(@lspb, [0 2], [1 -1], 50);
>> plot(x)
在指定的时间内x1从0运动到1,x2从2运动到-1:
参考:
V-rep学习笔记:Reflexxes Motion Library 4
Introduction to Robotics - Mechanics and Control. Chapter 7 Trajectory generation
Robotics, vision and control fundamental algorithms in MATLAB Chapter 3 Time and Motion
机器人中的轨迹规划(Trajectory Planning )的更多相关文章
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 泡泡一分钟:Efficient Trajectory Planning for High Speed Flight in Unknown Environments
张宁 Efficient Trajectory Planning for High Speed Flight in Unknown Environments 高效飞行在未知环境中的有效轨迹规划链接: ...
- 机器人学 —— 轨迹规划(Artificial Potential)
今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor. 最后一节课的内容是利用势场来进行轨迹规划.此方法的思路非常清晰,针对Configration ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线. 1.轨迹计划的对象 轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨 ...
随机推荐
- Redis的工作流程
从图上可以看出,当一个客户端访问服务器的时候,客户端请求会先到达Nginx,由Nginx负责对数据进行分发,上传到多个服务器,当用户访问到tomcat1的时候,会进行登陆验证并将session放入se ...
- Maze-hdu4035(DP求概率)
链接:http://acm.hdu.edu.cn/showproblem.php?pid=4035 题意: 有n个房间,由n-1条隧道连通起来,实际上就形成了一棵树, 从结点1出发,开始走,在每个结点 ...
- 浪里个浪 FZU - 2261
TonyY是一个喜欢到处浪的男人,他的梦想是带着兰兰姐姐浪遍天朝的各个角落,不过在此之前,他需要做好规划. 现在他的手上有一份天朝地图,上面有n个城市,m条交通路径,每条交通路径都是单行道.他已经预先 ...
- 003.Keepalived搭建LVS高可用集群
一 基础环境 1.1 IP规划 OS:CentOS 6.8 64位 节点类型 IP规划 主机名 类型 主 Director Server eth0:172.24.8.10 DR1 公共IP eth1: ...
- 004.etcd集群部署-动态发现
一 etcd发现简介 1.1 需求背景 在实际环境中,集群成员的ip可能不会提前知道.如使用dhcp自动获取的情况,在这些情况下,使用自动发现来引导etcdetcd集群,而不是指定静态配置,这个过程被 ...
- 从小白到区块链工程师:第一阶段:Go语言的控制台输入和输出(3)
六,Print系列的函数输出 1:Println 打印换行.Print控制台打印,lnline 一行,打印数据后自动换一行显示.下面显示在控制台打印出不同的类型. 打印输出结果后,会自动换一行.打印结 ...
- 记录一个chrome 65渲染的bug
前段时间发现一个chrome 65+的BUG(chrome已更新到66,BUG仍然存在),一个元素同时使用了以下样式(失去焦点和css3的Z轴平移0deg),渲染异常 /*bug style*/ fi ...
- js日期处理函数 -- 判断闰年,获取当月的总天数、添加月份
1. 判断是否是闰年 function isLeapYear(eDate) { var year = eDate.getFullYear(); return (((0 == year % 4) &am ...
- Adobe Premiere Pro生成峰值文件假死
一.正文 使用Adobe的Premiere Pro CC进行视频剪辑制作的时候,有的时候在右下角总会出现一个“自动生成峰值文件”的提示符,并跟随一个进度条: 大部分时候,这并不会引起什么问题.虽然我也 ...
- shell crlf to lf
UNIX/Linux Commands You can use the following tools: dos2unix (also known as fromdos) – converts tex ...