泡泡一分钟:Towards real-time unsupervised monocular depth estimation on CPU
Towards real-time unsupervised monocular depth estimation on CPU
Matteo Poggi , Filippo Aleotti , Fabio Tosi , Stefano Mattoccia
在CPU上进行实时无监督单目深度估计
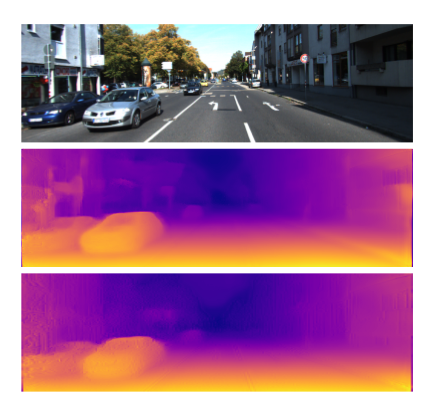
Abstract— Unsupervised depth estimation from a single image is a very attractive technique with several implications in robotic, autonomous navigation, augmented reality and so on.This topic represents a very challenging task and the advent of deep learning enabled to tackle this problem with excellent results. However, these architectures are extremely deep and complex. Thus, real-time performance can be achieved only by leveraging power-hungry GPUs that do not allow to infer depth maps in application fields characterized by low-power constraints. To tackle this issue, in this paper we propose a novel architecture capable to quickly infer an accurate depth map on a CPU, even of an embedded system, using a pyramid of features extracted from a single input image. Similarly to state-of-the-art, we train our network in an unsupervised manner casting depth estimation as an image reconstruction problem.Extensive experimental results on the KITTI dataset show that compared to the top performing approach our network has similar accuracy but a much lower complexity (about 6% of parameters) enabling to infer a depth map for a KITTI image in about 1.7 s on the Raspberry Pi 3 and at more than 8 Hz on a standard CPU. Moreover, by trading accuracy for efficiency, our network allows to infer maps at about 2 Hz and 40 Hz respectively, still being more accurate than most state-of-the-art slower methods. To the best of our knowledge, it is the first method enabling such performance on CPUs paving the way for effective deployment of unsupervised monocular depth estimation even on embedded systems.
单个图像的无监督深度估计是一种非常有吸引力的技术,在机器人,自主导航,增强现实等方面具有多种意义。本主题代表了一项非常具有挑战性的任务,深度学习的出现使得能够以优异的成绩解决这一问题。但是,这些架构非常深刻和复杂。 因此,仅通过利用耗电量大的GPU可以实现实时性能,所述GPU不允许在以低功率约束为特征的应用领域中推断深度图。为了解决这个问题,在本文中,我们提出了一种新颖的架构,能够使用从单个输入图像中提取的特征金字塔,在CPU甚至是嵌入式系统上快速推断出精确的深度图。与现有技术类似,我们以无人监督的方式训练我们的网络,将深度估计作为图像重建问题。此外,通过交易效率的准确性,我们的网络允许分别推断大约2 Hz和40 Hz的地图,仍然比大多数最先进的慢速方法更准确。据我们所知,这是第一种在CPU上实现这种性能的方法,即使在嵌入式系统上也能为有效部署无监督单眼深度估计铺平道路。
泡泡一分钟:Towards real-time unsupervised monocular depth estimation on CPU的更多相关文章
- 泡泡一分钟:Stabilize an Unsupervised Feature Learning for LiDAR-based Place Recognition
Stabilize an Unsupervised Feature Learning for LiDAR-based Place Recognition Peng Yin, Lingyun Xu, Z ...
- 泡泡一分钟:GEN-SLAM - Generative Modeling for Monocular Simultaneous Localization and Mapping
张宁 GEN-SLAM - Generative Modeling for Monocular Simultaneous Localization and Mapping GEN-SLAM - 单 ...
- 泡泡一分钟:Perception-aware Receding Horizon Navigation for MAVs
作为在空中抛掷四旋翼飞行器后恢复的第一步,它需要检测它使用其加速度计的发射.理想的情况下,在飞行中,加速度计理想地仅测量由于施加的转子推力引起的加速度,即.因此,当四旋翼飞行器发射时,我们可以检测到测 ...
- 泡泡一分钟: Deep-LK for Efficient Adaptive Object Tracking
Deep-LK for Efficient Adaptive Object Tracking "链接:https://pan.baidu.com/s/1Hn-CVgiR7WV0jvaYBv5 ...
- 泡泡一分钟:Cooperative Object Transportation by Multiple Ground and Aerial Vehicles: Modeling and Planning
张宁 Cooperative Object Transportation by Multiple Ground and Aerial Vehicles: Modeling and Planning 多 ...
- 泡泡一分钟:Semantic Labeling of Indoor Environments from 3D RGB Maps
张宁 Semantic Labeling of Indoor Environments from 3D RGB Maps Manuel Brucker, Maximilian Durner, Ra ...
- 泡泡一分钟:Cubic Range Error Model for Stereo Vision with Illuminators
Cubic Range Error Model for Stereo Vision with Illuminators 带有照明器的双目视觉的三次范围误差模型 "链接:https://pan ...
- 泡泡一分钟:Exploiting Points and Lines in Regression Forests for RGB-D Camera Relocalization
Exploiting Points and Lines in Regression Forests for RGB-D Camera Relocalization 利用回归森林中的点和线进行RGB-D ...
- 泡泡一分钟:Automatic Parameter Tuning of Motion Planning Algorithms
Automatic Parameter Tuning of Motion Planning Algorithms 运动规划算法的自动参数整定 Jos´e Cano, Yiming Yang, Brun ...
随机推荐
- 最简单的社交分享代码,无需注册OpenID
包含新浪微博.QQ空间.人人网一键分享,无需注册各个开放平台的OpenID,简单易用. //分享 function share() { var shareLink = location.href; v ...
- MongoDB中MapReduce介绍与使用
一.简介 在用MongoDB查询返回的数据量很大的情况下,做一些比较复杂的统计和聚合操作做花费的时间很长的时候,可以用MongoDB中的MapReduce进行实现 MapReduce是个非常灵活和强大 ...
- Nginx实现url请求不区分大小写
原文地址:http://blog.linuxeye.com/382.html 如果你将跑在Windows下的项目(如:php)迁移到Linux下,由于Windows操作系统中,文件名是不区分大小写的: ...
- 在Windows服务器上启用TLS 1.2及TLS 1.2基本原理
在Windows服务器上启用TLS 1.2及TLS 1.2基本原理 在Windows服务器上启用TLS 1.2及TLS 1.2基本原理 最近由于Chrome40不再支持SSL 3.0了,GOOGLE认 ...
- sql server 2008 express 安装的时提示“重启计算机失败"
sql server 2008 express 安装的时提示"重启计算机失败" 解决办法: 打开注册表编辑器(regedit.exe),在HKEY_LOCAL_MACHINE\SY ...
- Android 使用WebView加载含有Canvas的页面截屏处理
无法截屏主要原因是webview渲染方式所导致:只需要AndroidManifest.xml中设置属性Android:hardwareAccelerated=”false”.
- 9.5 翻译系列:数据注解之ForeignKey特性【EF 6 Code-First系列】
原文链接:https://www.entityframeworktutorial.net/code-first/foreignkey-dataannotations-attribute-in-code ...
- 爬虫 需要什么样的 CPU,内存 和带宽
所有的需求都看这个图片吧,这个就是我爬取一个网站所用的服务器和服务器资源的消耗情况.
- React Native库版本升级与降级
迄今为止React Native获得了超过48K的star,最新版本0.44,已经趋于稳定.(官网地址:https://github.com/facebook/react-native).随着Reac ...
- jquery ui autocomplete输入中文不自动完成的问题
因为输入法或浏览器的问题,在输入中文后并没有触发自动完成,要再按多一下键盘才触发,查看发现它是用keydown来实现.bind("keydown.autocomplete", fu ...