OpenCV LK光流法测试
OpenCV版本: 3.2.0
例程文件目录/samples/cpp/lkdemo.cpp
原始程序是采集相机数据,台式机没有摄像头,用Euroc测试集,偷ORB_SLAM2 /Examples/Monocular/mono_euroc.cc里的LoadImages函数读取数据
在cpp目录下新建一个自己的目录mylk,拷贝lkdemo和example_cmake目录下的CMakeLists.txt并修改:
add_executable(lk_example lkdemo.cpp)
target_link_libraries(lk_example ${OpenCV_LIBS})
新建目录build,进入后cmake .. + make 编译运行即可。run.sh如下:
./lkdemo ~/slamData/EuRoC/mav02/cam0/data ~/ORB_SLAM2/Examples/Stereo/EuRoC_TimeStamps/MH02.txt
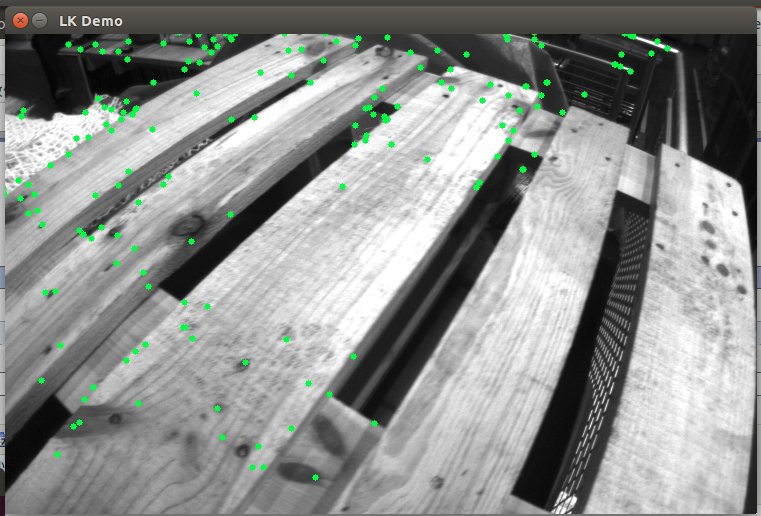
先提取角点,亚像素精度提炼角点,光流跟踪。
运行过程中会监控鼠标和键盘:
按下鼠标左键 -> 添加一个角点
按下r -> 初始化角点
按下c -> 清除角点
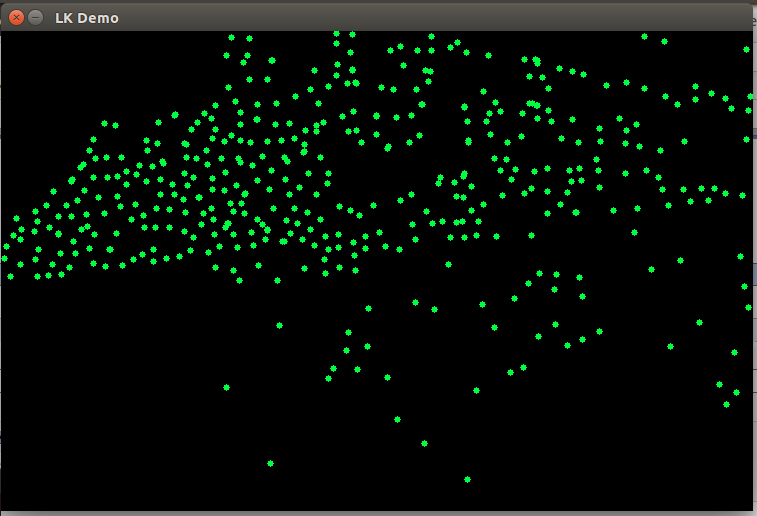
按下n -> 只显示角点(右图)
按下esc -> 退出
修改后的程序:
#include "opencv2/video/tracking.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/videoio.hpp"
#include "opencv2/highgui.hpp" #include <iostream>
#include <ctype.h>
#include <fstream>
#include <algorithm>
using namespace std; using namespace cv;
void LoadImages(const string &strImagePath, const string &strPathTimes,
vector<string> &vstrImages, vector<double> &vTimeStamps)
{
ifstream fTimes;
fTimes.open(strPathTimes.c_str());
vTimeStamps.reserve();
vstrImages.reserve();
while(!fTimes.eof())
{
string s;
getline(fTimes,s);
if(!s.empty())
{
stringstream ss;
ss << s;
vstrImages.push_back(strImagePath + "/" + ss.str() + ".png");
double t;
ss >> t;
vTimeStamps.push_back(t/1e9); }
}
}
static void help()
{
// print a welcome message, and the OpenCV version
cout << "\nThis is a demo of Lukas-Kanade optical flow lkdemo(),\n"
"Using OpenCV version " << CV_VERSION << endl;
cout << "\nIt uses camera by default, but you can provide a path to video as an argument.\n";
cout << "\nHot keys: \n"
"\tESC - quit the program\n"
"\tr - auto-initialize tracking\n"
"\tc - delete all the points\n"
"\tn - switch the \"night\" mode on/off\n"
"To add/remove a feature point click it\n" << endl;
} Point2f point;
bool addRemovePt = false; static void onMouse( int event, int x, int y, int /*flags*/, void* /*param*/ )
{
if( event == EVENT_LBUTTONDOWN )
{
point = Point2f((float)x, (float)y);
addRemovePt = true;
}
} int main( int argc, char** argv )
{
VideoCapture cap;
TermCriteria termcrit(TermCriteria::COUNT|TermCriteria::EPS,,0.03);
Size subPixWinSize(,), winSize(,); const int MAX_COUNT = ;
bool needToInit = false;
bool nightMode = false; namedWindow( "LK Demo", );
setMouseCallback( "LK Demo", onMouse, ); Mat gray, prevGray, image, frame;
vector<Point2f> points[]; vector<string> vstrImageFilenames;
vector<double> vstrstamps;
LoadImages(string(argv[]), string(argv[]), vstrImageFilenames, vstrstamps);
for(int i=;i<vstrImageFilenames.size();i++)
{ image = imread(vstrImageFilenames[i],IMREAD_COLOR);
cvtColor(image, gray, COLOR_BGR2GRAY); if( nightMode )
image = Scalar::all(); if( needToInit )
{
// automatic initialization
goodFeaturesToTrack(gray, points[], MAX_COUNT, 0.01, , Mat(), , , 0.04);
cornerSubPix(gray, points[], subPixWinSize, Size(-,-), termcrit);
addRemovePt = false;
}
else if( !points[].empty() )
{
vector<uchar> status;
vector<float> err;
if(prevGray.empty())
gray.copyTo(prevGray);
calcOpticalFlowPyrLK(prevGray, gray, points[], points[], status, err, winSize,
, termcrit, , 0.001);
size_t i, k;
for( i = k = ; i < points[].size(); i++ )
{
if( addRemovePt )
{
if( norm(point - points[][i]) <= )
{
addRemovePt = false;
continue;
}
} if( !status[i] )
continue; points[][k++] = points[][i];
circle( image, points[][i], , Scalar(,,), -, );
}
points[].resize(k);
} if( addRemovePt && points[].size() < (size_t)MAX_COUNT )
{
vector<Point2f> tmp;
tmp.push_back(point);
cornerSubPix( gray, tmp, winSize, Size(-,-), termcrit);
points[].push_back(tmp[]);
addRemovePt = false;
} needToInit = false;
imshow("LK Demo", image); char c = (char)waitKey();
if( c == )
break;
switch( c )
{
case 'r':
needToInit = true;
break;
case 'c':
points[].clear();
points[].clear();
break;
case 'n':
nightMode = !nightMode;
break;
} std::swap(points[], points[]);
cv::swap(prevGray, gray);
} return ;
}
OpenCV LK光流法测试的更多相关文章
- OpenCV Using Python——基于SURF特征提取和金字塔LK光流法的单目视觉三维重建 (光流、场景流)
https://blog.csdn.net/shadow_guo/article/details/44312691 基于SURF特征提取和金字塔LK光流法的单目视觉三维重建 1. 单目视觉三维重建问题 ...
- OpenCV 使用光流法检测物体运动
OpenCV 可以使用光流法检测物体运动,贴上代码以及效果. // opticalflow.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" ...
- LK 光流法简介
前言 若假定一个局部区域的像素运动是一致的,则可以用这个新的约束条件替代前文中提到的全局速度平滑约束条件.这种光流算法就叫做 LK 光流法. LK 光流法的推导 首先,需要推导出光流约束方程. 这一步 ...
- 光流法详解之一(LK光流)
Lucas–Kanade光流算法是一种两帧差分的光流估计算法.它由Bruce D. Lucas 和 Takeo Kanade提出 [1]. LK光流法有三个假设条件: 1. 亮度恒定:一个像素点随着时 ...
- 【Matlab】运动目标检测之“光流法”
光流(optical flow) 1950年,Gibson首先提出了光流的概念,所谓光流就是指图像表现运动的速度.物体在运动的时候之所以能被人眼发现,就是因为当物体运动时,会在人的视网膜上形成一系列的 ...
- 【图像处理】openCV光流法追踪运动物体
openCV光流法追踪运动物体 email:chentravelling@163.com 一.光流简单介绍 摘自:zouxy09 光流的概念是Gibson在1950年首先提出来的.它是空间运动物体在观 ...
- 目标跟踪之Lukas-Kanade光流法
转载自:http://blog.csdn.net/u014568921/article/details/46638557 光流是图像亮度的运动信息描述.光流法计算最初是由Horn和Schunck于19 ...
- LK光流算法:提高计算精度和增加搜索范围
LK光流算法:提高计算精度和增加搜索范围 关于LK算法的基本理论,见:http://www.cnblogs.com/dzyBK/p/4960630.html 这里主要阐述如何提高LK算法的计算精度和在 ...
- 目标跟踪之Lukas-Kanade光流法(转)
光流是图像亮度的运动信息描述.光流法计算最初是由Horn和Schunck于1981年提出的,创造性地将二维速度场与灰度相联系,引入光流约束方程,得到光流计算的基本算法.光流计算基于物体移动的光学特性提 ...
随机推荐
- 陌生的 metaclass(转)
add by zhj:这是我见过的对metaclass解释最清楚的文章了,例子很好,真是一例胜千言 原文:http://wiki.jikexueyuan.com/project/explore-pyt ...
- MyBatis传递参数
MyBatis传递参数 一.使用 map 接口传递参数 在 MyBatis 中允许 map 接口通过键值对传递多个参数,把接口方法定义为 : public List<Role> findR ...
- Got timeout reading communication packets解决方法
Got timeout reading communication packets解决方法 http://www.th7.cn/db/mysql/201702/225243.shtml [Note] ...
- Linux系统上传文件与下载文件命令
我们用的服务器都是Linux系统的,如果用的是远程服务器,就需要将我们的代码推送过去,这里可以用到PSCP命令. (一)上传 pscp 本机文件的路径以及文件名 远程主机的用户名@远程主机IP:想要存 ...
- Python3学习之路~3.1 函数基本语法及特性、返回值、参数、局部与全局变量
1 函数基本语法及特性 定义: 函数是指将一组语句的集合通过一个名字(函数名)封装起来,要想执行这个函数,只需调用其函数名即可 特性: 减少重复代码 使程序变的可扩展 使程序变得易维护 语法定义: d ...
- shell中expect介绍
expect介绍 借助Expect处理交互的命令,可以将交互 过程如:ssh登录,ftp登录等写在一个脚本上,使之自动化完成.尤其适用于需 要对多台服务器执行相同操作的环境中,可以大大提高系统管理人员 ...
- 011-ThreadFactory线程工厂
一.源码分析 ThreadFactory是一个线程工厂.用来创建线程.这里为什么要使用线程工厂呢?其实就是为了统一在创建线程时设置一些参数,如是否守护线程.线程一些特性等,如优先级.通过这个Tread ...
- VGA线 1080P之伤 <中秋节篇>
故障:通过一台笔记本,在一台高清的电视机上使用VGA线进行视频传输,分辩率最高只能显示1600*1200,为什么不是1080P? 哎,我也很郁闷,查了相关的资料~电视机是最高支持1080P分辩率的,笔 ...
- 由swap引发的关于按值传递和引用传递的思考与总结
函数的参数传递定义:在调用一个函数时,将实参传递给形参. C++中函数的参数传递有按值传递.地址传递和引用传递3种方式.注意:地址也是一种值,按值传递和按地址传递都是单向的值传递方式,即形参都不会回传 ...
- vue 动态绑定背景图片
html <div class="racetm" :style="{backgroundImage: 'url(' + (coverImgUrl ? coverIm ...