c# PID算法入门
离开工控行业已经有一段时间了,最近回忆起以前的工作,又对 PID 算法有了兴趣。所以写了一个小项目,希望可以帮到需要的人,也算是对那段工作经历的一个总结。
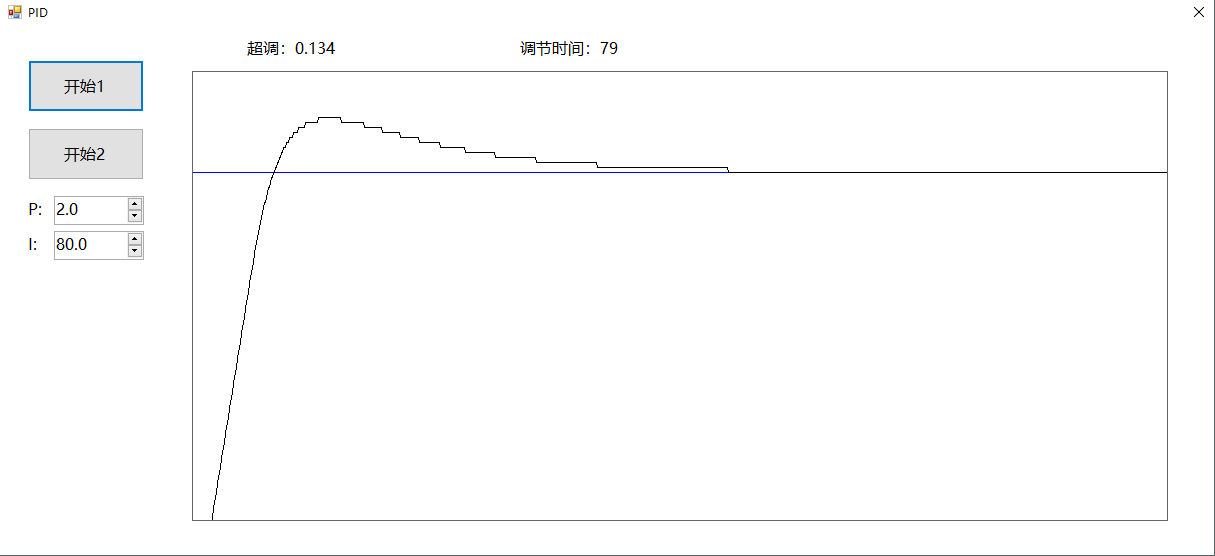
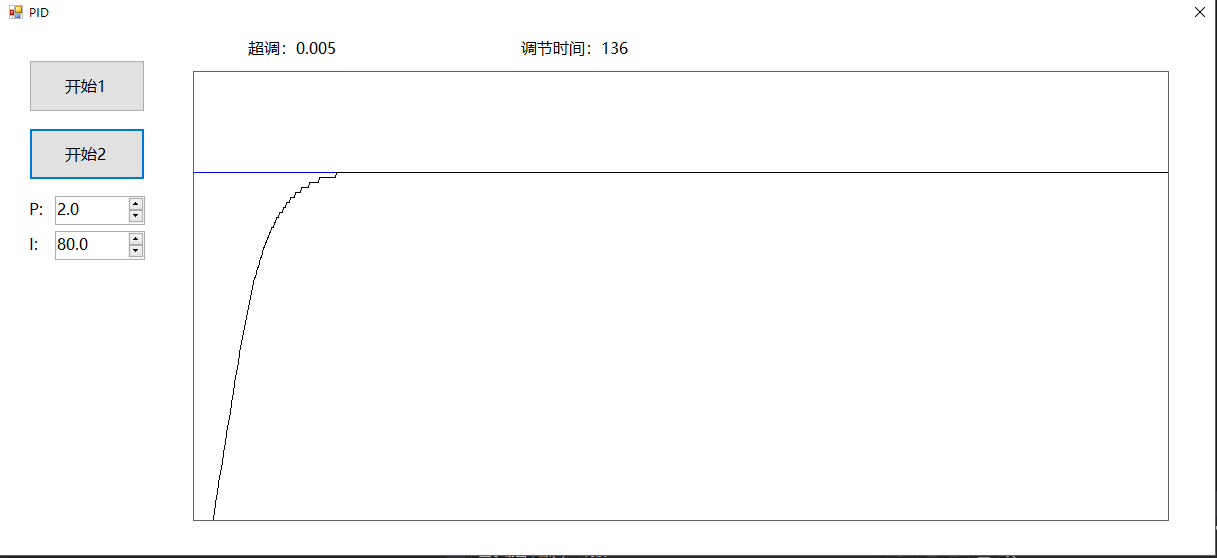
这是一个 winform 的项目。负载是一个水箱,有一个进水口,一个出水口。设定值为液位,通过控制进水口的阀门开度使液位达到设定值,传感器的滞后时间为10秒。每秒执行一次 PID 算法(对于运动控制的项目需要将采样时间调低)。
结果:
左图采用原生 PID 调节,右图采用积分分离后的 PID 调节(在误差小于一定值的情况下积分才开始累积)。可以看出积分分离可以有效的抑制超调量,但是会增加调节时间。
由于微分调节对系统稳定性影响较大,不建议初学者使用。
在分配 PID 的各项参数时,除了使用 “自动控制理论” 中计算传递函数,还可以通过试凑的方法。先确定比例的大致范围,再加入积分。加入积分时,需要先将积分值调到很大(积分值大表示效果较弱),再慢慢降低。
窗口中的控件:
label : lblInfo1(用于显示超调)lblInfo2(用于显示调节时间)
button:btnStart(开始普通 PID 算法)btnStart2(开始改进型 PID 算法)(主要采用积分分离算法)
numericupdown:numP(比例值)numI(积分值)
panel:panel2(用于绘图显示 PID 调节过程)
代码:
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms; namespace PID
{
public partial class Form1 : Form
{
PID frmPid;
Box frmBox;
const int yBase = ;
const int yMul = ;
const int xMul = ;
int time = ;//上次采样时间 时间为秒
Point lastPoint;
decimal maxLevel = ;//最大值用于求超调
public Form1()
{
InitializeComponent();
frmPid = new PID();
frmBox = new Box(, 0.3m, 0.1m, 0m, 0.5m);
Init();
}
//初始化
private void Init()
{
using (Graphics g = panel2.CreateGraphics())
{
Pen whitePen = new Pen(Brushes.White, );
Point point1 = new Point(, );
Point point2 = new Point(, );
g.DrawLine(whitePen, point1, point2);
}
maxLevel = ;
time = ;
lastPoint = new Point(, yBase);
}
private void btnStart_Click(object sender, EventArgs e)
{
Start();
} private void btnStart2_Click(object sender, EventArgs e)
{
Start();
} /// <summary>
/// 开始
/// </summary>
/// <param name="number">0使用普通pi调节,1使用改进pi调节</param>
private void Start(int number)
{
Init();
frmPid.Init(0.8m, numP.Value, numI.Value, , );
frmBox.Init();
Pen bluePen = new Pen(Brushes.Blue, );
using (Graphics g = panel2.CreateGraphics())
{
Point point1 = new Point(, yBase - Convert.ToInt32(frmPid.Target * ) * yMul);
Point point2 = new Point(, yBase - Convert.ToInt32(frmPid.Target * ) * yMul);
g.DrawLine(bluePen, point1, point2);
}
bool complete = false;
for (int i = ; i < ; i++)
{
{
time++;
frmBox.ChangeLevel();
Pen blackPen = new Pen(Brushes.Black, );
using (Graphics g = panel2.CreateGraphics())
{
Point point = new Point(time * xMul, yBase - Convert.ToInt32(frmBox.GetLevel() * ) * yMul);
g.DrawLine(blackPen, point, lastPoint);
lastPoint = point;
}
decimal degreeIn = frmPid.GetOutPutValue(frmBox.GetLevel(), number);
frmBox.ChangeDegreeIn(degreeIn);
} if (frmBox.GetLevel() > maxLevel)
{
maxLevel = frmBox.GetLevel();
}
if ((Math.Abs(frmBox.GetLevel() - frmPid.Target) / frmPid.Target < 0.01m) && (!complete))
{
complete = true;
lblInfo2.Text = "调节时间:" + time;
}
}
decimal up = ;
if (maxLevel > frmPid.Target)
{
up = (maxLevel - frmPid.Target) / frmPid.Target;
}
lblInfo1.Text = "超调:" + up.ToString("0.000");
}
} public class Box
{
private List<decimal> levelList;
private decimal area; //底面积 平方米
private decimal maxFlowOut = 0.05m; //出水阀最大流量立方每秒
private decimal maxFlowIn = 0.1m; //进水阀最大流量 立方每秒
private decimal degreeIn; //进水阀开度
private decimal degreeOut; //出水阀开度 /// <summary>
/// 构造函数
/// </summary>
/// <param name="area">底面积</param>
/// <param name="maxFlowIn">进水阀最大流量 立方每秒</param>
/// <param name="maxFlowOut">出水阀最大流量立方每秒</param>
/// <param name="degreeIn">进水阀开度</param>
/// <param name="degreeOut">出水阀开度</param>
public Box(decimal area, decimal maxFlowIn, decimal maxFlowOut, decimal degreeIn, decimal degreeOut)
{
this.area = area;
this.maxFlowOut = maxFlowOut;
this.maxFlowIn = maxFlowIn;
this.degreeIn = degreeIn;
this.degreeOut = degreeOut;
this.levelList = new List<decimal>();
this.levelList.Add();
}
public void Init()
{
this.levelList = new List<decimal>();
this.levelList.Add();
}
private decimal GetActualLevel()
{
return this.levelList[this.levelList.Count - ];
}
/// <summary>
///每调用一次表示经过了一秒
/// </summary>
public void ChangeLevel()
{
decimal myflow = this.degreeIn * this.maxFlowIn - this.degreeOut * this.maxFlowOut;//增加的流量
decimal level = this.GetActualLevel() + myflow / this.area;//新的液位
if (level < )
{
level = ;
}
if (level > )
{
level = ;
}
this.levelList.Add(level);
while (this.levelList.Count > )
{
this.levelList.RemoveAt();
}
} public decimal GetLevel()
{
return this.levelList[];
} /// <summary>
/// 改变进水阀开度
/// </summary>
public void ChangeDegreeIn(decimal degreeIn)
{
this.degreeIn = degreeIn;
}
} /// <summary>
/// PID控制类
/// </summary>
public class PID
{
/// <summary>
/// 积分累计值
/// </summary>
public decimal IntegralValue { get; set; }
/// <summary>
/// 设定值
/// </summary>
public decimal Target { get; set; }
/// <summary>
/// 比例
/// </summary>
public decimal P { get; set; }
/// <summary>
/// 积分
/// </summary>
public decimal I { get; set; }
/// <summary>
/// 输出限幅
/// </summary>
private decimal MinOutPut { get; set; }
/// <summary>
/// 输出限幅
/// </summary>
private decimal MaxOutPut { get; set; } public void Init(decimal target, decimal p, decimal i, decimal minOutput, decimal maxOutput)
{
this.Target = target;
this.P = p;
this.I = i;
IntegralValue = ;
if (minOutput > maxOutput)
{
throw new Exception("下限幅不能大于上限幅");
}
this.MinOutPut = minOutput;
this.MaxOutPut = maxOutput;
} /// <summary>
/// 获得输出值
/// </summary>
/// <param name="feedBack">反馈值</param>
/// <param name="number">0普通算法,1改进后的算法</param>
/// <returns></returns>
public decimal GetOutPutValue(decimal feedBack, int number)
{
decimal error = this.Target - feedBack;
if (this.I > )
{
if (number == )
{
this.IntegralValue += error / this.I;
}
else
{
if ((Math.Abs(error) < 0.5m))
{
this.IntegralValue += error / this.I;
}
}
}
decimal output = error * this.P + this.IntegralValue;
if (output < this.MinOutPut)
{
return this.MinOutPut;
}
if (output > this.MaxOutPut)
{
return this.MaxOutPut;
}
return output;
}
}
}
c# PID算法入门的更多相关文章
- 某科学的PID算法学习笔记
最近,在某社团的要求下,自学了PID算法.学完后,深切地感受到PID算法之强大.PID算法应用广泛,比如加热器.平衡车.无人机等等,是自动控制理论中比较容易理解但十分重要的算法. 下面是博主学习过程中 ...
- 基本的PID算法整理(水缸的例子有问题!!)
一,先谈关于水缸漏水的问题 谈到PID原理入门的时候,大家经常会举的一个例子就是水缸漏水的例子.这里把一个解释水缸漏水的帖子放在这里:https://blog.csdn.net/qq_41736609 ...
- 线性控制原理——PID算法应用
使用控制系统(PID)控制被控对象 PID控制的三要素:控制器,被控对象,反馈器.控制器就是一个数学模型,就PID来说,等同于PID算法.是对反馈量的一个处理与输出.通俗的说就是对于每个被控的量,我的 ...
- PID算法学习记录
最近做项目需要用到PID算法,这个本来是我的专业(控制理论与控制工程),可是我好像是把这个东西全部还给老师了. 没办法,只好抽时间来学习了. 先占个座,后续将持续更新!
- 【转】 SVM算法入门
课程文本分类project SVM算法入门 转自:http://www.blogjava.net/zhenandaci/category/31868.html (一)SVM的简介 支持向量机(Supp ...
- 位置式PID与增量式PID算法
位置式PID与增量式PID算法 PID控制是一个二阶线性控制器 定义:通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能. 优点 ...
- 三角函数计算,Cordic 算法入门
[-] 三角函数计算Cordic 算法入门 从二分查找法说起 减少乘法运算 消除乘法运算 三角函数计算,Cordic 算法入门 三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来 ...
- 循环冗余校验(CRC)算法入门引导
目录 写给嵌入式程序员的循环冗余校验CRC算法入门引导 前言 从奇偶校验说起 累加和校验 初识 CRC 算法 CRC算法的编程实现 前言 CRC校验(循环冗余校验)是数据通讯中最常采用的校验方式.在嵌 ...
- 【算法入门】广度/宽度优先搜索(BFS)
广度/宽度优先搜索(BFS) [算法入门] 1.前言 广度优先搜索(也称宽度优先搜索,缩写BFS,以下采用广度来描述)是连通图的一种遍历策略.因为它的思想是从一个顶点V0开始,辐射状地优先遍历其周围较 ...
随机推荐
- 自定义checkbox(对勾)和radio样式
checkbox: html: <div> <label class="unSelected selected" for="choose"&g ...
- C#编程--第二天
一.变量:变量先声明,后赋值,再使用. 语法:变量类型 变量名=值: 变量类型: 分为基本数据类型和引用类 基本数据类型:整型.浮点型.字符型.布尔型 引用类:字符串.日期时间.枚举类型.结构类型 i ...
- HTML中的img标签属性
<img>标签 标签用于插入图片.它是单独使用的,没有闭合标签. <img src="https://fakeimg.pl/350x200/ff0000,128/000,2 ...
- 【记录】docker 安装redis
docker拉取镜像 docker pull redis docker 启动redis docker run -dit -p 6379:6379 --name redis redis:latest - ...
- Mac读写NTFS硬盘
简明教程: 1.插上硬盘后,查看你的硬盘名称,这里假设名称是Untitled,牢记 2.在终端输入sudo nano /etc/fstab 敲击回车 3.现在你看到了一个编辑界面,输入LABEL=Un ...
- 在脚本中使用set命令调试脚本
当脚本文件较长时,可以使用set命令指定调试一段脚本.在脚本中使用set -x命令开启调式模式:使用set +x命令关闭调式模式. 例如: #!/bin/bash #Scriptname: greet ...
- HDU-5072 补集转化+容斥原理
题意:给n个数,求满足一下条件的三元组(a,b,c)数量:a,b,c两两互质或者a,b,c两两不互质. 解法:这道题非常巧妙地运用补集转化和容斥原理.首先我们令这n个数为n个点,然后两两之间连边如果是 ...
- shell巡检草拟
#!/bin/bash phy_cpu=$(cat /proc/cpuinfo | grep "physical id"|sort | uniq | wc -l) logic_cp ...
- (PASS)PLSQL激活
注册码: Product Code(产品编号):4t46t6vydkvsxekkvf3fjnpzy5wbuhphqz serial Number(序列号):601769 password(口令):xs ...
- 小白关于走马灯幻灯片的javascript代码分析
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/ ...