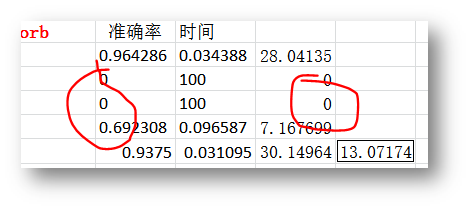
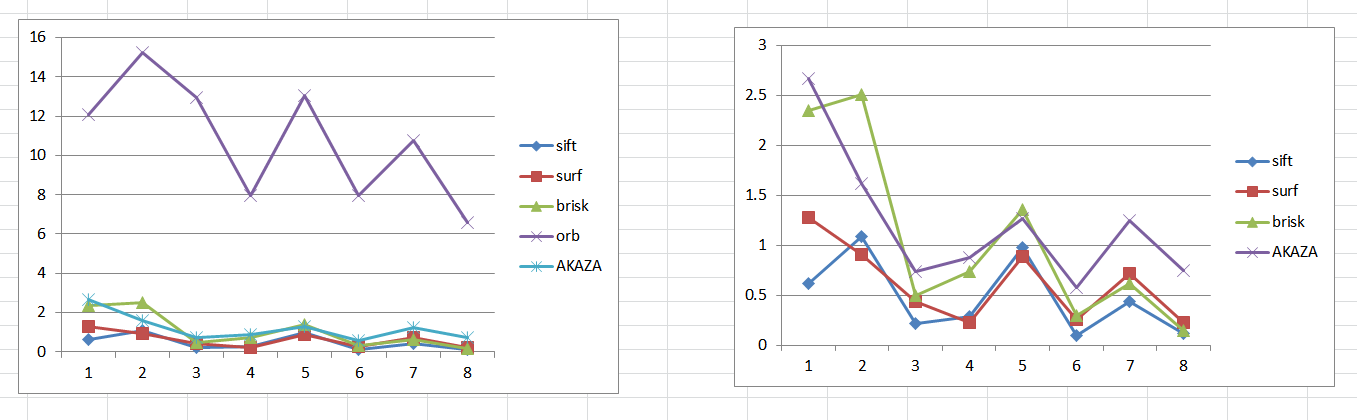
特征提取算法的综合实验(多种角度比较sift/surf/brisk/orb/akze)

}

}
}



特征提取算法的综合实验(多种角度比较sift/surf/brisk/orb/akze)的更多相关文章
- 【特征检测】BRISK特征提取算法
[特征检测]BRISK特征提取算法原创hujingshuang 发布于2015-07-24 22:59:21 阅读数 17840 收藏展开简介 BRISK算法是2011年ICCV上< ...
- [转]SIFT,SURF,ORB,FAST 特征提取算法比较
转载地址:https://blog.csdn.net/vonzhoufz/article/details/46461849 主要的特征检测方法有以下几种,在一般的图像处理库中(如opencv, VLF ...
- 特征提取算法(3)——SIFT特征提取算子
目录: 前言 1.高斯尺度空间GSS 2.高斯差分DOG 用DoG检测特征点 GSS尺度选择 3.图像金字塔建立 用前一个octave中的倒数第三幅图像生成下一octave中的第一幅图像 每层octa ...
- 特征提取算法(1)——纹理特征提取算法LBP
模式识别中进行匹配识别或者分类器分类识别时,判断的依据就是图像特征.用提取的特征表示整幅图像内容,根据特征匹配或者分类图像目标. 常见的特征提取算法主要分为以下3类: 基于颜色特征:如颜色直方图.颜色 ...
- SIFT 特征提取算法总结
原文链接:http://www.cnblogs.com/cfantaisie/archive/2011/06/14/2080917.html 主要步骤 1).尺度空间的生成: 2).检测尺度空间极 ...
- CCNP第四天 OSPF综合实验(1)
ospf综合实验(1) 本实验主要考察ospf中的接口上的多种工作方式 实验如图所示: 所用拓扑为CCNP标准版,如图: --------------------------------------- ...
- (6综合实验)从零开始的嵌入式图像图像处理(PI+QT+OpenCV)实战演练
从零开始的嵌入式图像图像处理(PI+QT+OpenCV)实战演练 1综述http://www.cnblogs.com/jsxyhelu/p/7907241.html2环境架设http://www.cn ...
- 肺结节CT影像特征提取(二)——肺结节CT图像特征提取算法描述
摘自本人毕业论文<肺结节CT影像特征提取算法研究> 医学图像特征提取可以认为是基于图像内容提取必要特征,医学图像中需要什么特征基于研究需要,提取合适的特征.相对来说,医学图像特征提取要求更 ...
- 第十三节、SURF特征提取算法
上一节我们已经介绍了SIFT算法,SIFT算法对旋转.尺度缩放.亮度变化等保持不变性,对视角变换.仿射变化.噪声也保持一定程度的稳定性,是一种非常优秀的局部特征描述算法.但是其实时性相对不高. SUR ...
随机推荐
- JavaWeb(一)Servlet中的request与response
一.HttpServletRequest概述 1.1.HttpServletRequest简介 HttpServletRequest对象代表客户端的请求,当客户端通过HTTP协议访问服务器时,HTTP ...
- Response.Write输出导致页面变形和页面白屏解决办法
方法一:此方法应该是微软官方推荐的方法,但弹出时会造成页面白屏.Page.RegisterStartupScript("TestEvent", "<script&g ...
- 聊聊Java语言中的单例
package com.xinke.mybatis.test; public class TestSingleton { private static TestSingleton ts = null; ...
- 使用Grub Rescue 修复MBR
ubuntu 14.04 (本机) 1.使用以下命令查看分区: grub rescure> ls (hd0,msdos7),(hd0,msdos8),(hd0,msdos9 ...
- Pycharm安装、设置、优化
一.版本选择 建议安装5.0版本,因为好注册,这个你懂得. 下载地址: https://confluence.jetbrains.com/display/PYH/Previous+PyCharm+Re ...
- JSONP、图片Ping、XMLHttpRequest2.0等跨域资源请求(CORS)
跨域:当协议.主域名.子域名.端口号中任意一个不相同时都不算同一个域,而在不同域之间请求数据即为跨域请求.解决方法有以下几种(如有错误欢迎指出)以请求图片url为例: 1.通过XMLHttpReque ...
- Pyhton编程(二)之变量、用户输入及条件语句
一:变量 变量定义的规则 1)只能由数字.字母.下划线组成(不能以数字开头) 2)不能使用关键字作为变量名 ['and', 'as', 'assert', 'break', 'class', 'con ...
- 数据库中有的字段为null时,反馈到页面上是什么也不显示?如何用一个【无】字来代替呢?
<asp:ListView ID="listViewCustomer" DataSourceID="ods_Customer" runat="s ...
- win10 uwp BadgeLogo 颜色
本文讲的是在上传应用商店出现BadgeLogo颜色问题,和如何解决,因为我是渣渣,本文可能带有一定的主观性和局限性,说的东西可能不对或者不符合每个人的预期.如果觉得我有讲的不对的,就多多包含,或者直接 ...
- C++基础知识2
2 变量和基本类型 2.1 基本内置类型 C++定义了一系列包括算术类型(arithmetic type)和空类型(void)在内的基本数据类型.其中算术类型包含字符,整型数,布尔值和浮点数.空类型不 ...