目标检测之选择性搜索-Selective Search
一、滑动窗口检测器
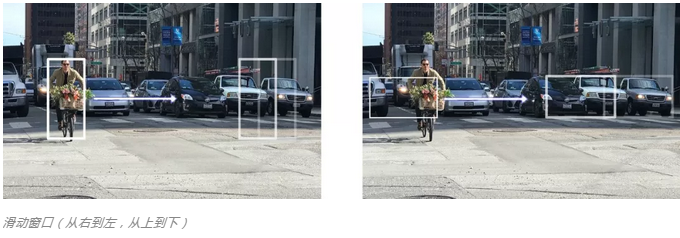
一种用于目标检测的暴力方法就是从左到右,从上到下滑动窗口,利用分类识别目标。为了在不同观察距离处检测不同的目标类型,我们可以使用不同大小和宽高比的窗口
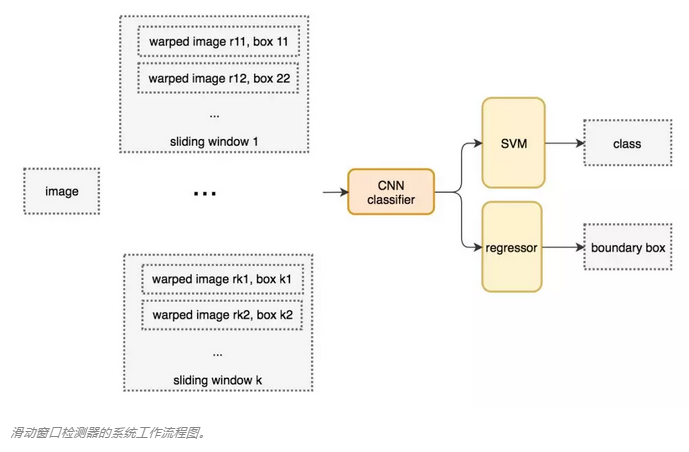
得到窗口内的图片送入分类器,但是很多分类器只取固定大小的图像,所以这些图像需要经过一定的变形转换。但是,这不影响分类的准确率,因为分类器是可以处理变形后的图像

将图像变形转换成固定大小
变形图像块被输入CNN分类器中,提取4096个特征,使用SVM分类器识别类别和该边界框的另一个线性回归器
下面是伪代码,我们创建很多窗口来检测不同位置的不同目标。要提升性能,一个显而易见的办法就是减少窗口的数量
for window in windows
patch = get_patch(image, window)
results = detector(patch)
二、选择性搜索
不使用暴力方法,而是用候选区域方法(region proposal method)创建目标检测的感兴趣区域(ROI)。在选择性搜索(selective search,SS)中,我们可以先利用基于图的图像分割的方法得到小尺度的区域,然后一次次合并得到大的尺寸。考虑所有特征,例如颜色、纹理、大小等,同时照顾下计算复杂度。
在深入介绍Selective Search之前,先说明一下需要考虑的问题:
- 适应不同尺度(Capture All Scales):穷举搜索(Exhaustive Selective)通过改变窗口大小来适应物体的不同尺度,选择搜索(Selective Search)同样无法避免这个问题。算法采用图像分割(Image Segmentation)以及使用一种层次算法(Hierarchical Algorithm)有效地解决了这个问题
- 多样化(Diversification):单一的策略无法应对多种类别的图像,使用颜色、纹理、大小等多种策略对分割号的区域进行合并
- 速度快
选择性搜索的具体算法(区域合并算法)
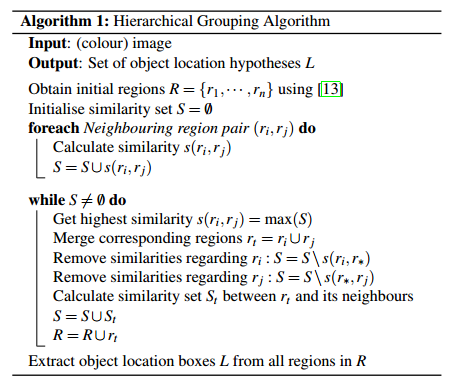
输入:一张图片
输出:候选的目标位置集合 算法:
利用切分方法得到候选的区域集合R = {r1,r2,…,rn}
初始化相似集合S = ϕ
foreach 遍历邻居区域对 (ri,rj) do
计算相似度s(ri,rj)
S = S ∪ s(ri,rj)
while S not=ϕ do
从s中得到最大的相似度s(ri,rj)=max(S)
合并对应的区域rt = ri ∪ rj
移除ri对应的所有相似度:S = S\s(ri,r*)
移除rj对应的所有相似度:S = S\s(r*,rj)
计算rt对应的相似度集合St
S = S ∪ St
R = R ∪ rt
L = R中所有区域对应的边框
首先通过基于图的图像分割方法初始化原始区域,就是将图像分割成很多很多的小块,使用贪心策略,计算每两个相邻区域的相似度,然后每次合并最相似的两块,直至最终只剩下一块完整的图片。然后这其中每次产生的图像块包括合并的图像块我们都保存下来,这样就得到图像的分成表示,那么如何计算两个图像块的相似度呢?
三、保持多样性的策略
区域合并采用了多样性的策略,如果简单采用一种策略很容易错误合并不相似的区域,比如只考虑纹理时,不同颜色的区域很容易被误合并。选择性搜索采用三种多样性策略来增加候选区域以保证召回:
- 多种颜色空间,考虑RGB、灰度、HSV及其变种
- 多种相似度度量标准,既考虑颜色相似度,又考虑纹理、大小、重叠情况等
- 通过改变阈值初始化原始区域,阈值越大,分割的区域越少
1、颜色空间转换
通过色彩空间转换,将原始色彩空间转换到多达八种色彩空间。也是为了考虑场景以及光照条件等,主要应用于图像分割算法中原始区域的生成(两个像素点的相似度计算时,计算不同颜色空间下的两点距离)。主要使用的颜色空间有:(1)RGB,(2)灰度I,(3)Lab,(4)rgI(归一化的rg通道加上灰度),(5)HSV,(6)rgb(归一化的RGB),(7)C,(8)H(HSV通道的H)
2、区域相似度计算
我们在计算多种相似度的时候,都是把单一相似度的值归一化到[0, 1]之间,1表示两个区域之间相似度最大
颜色相似度
- 纹理相似度
- 有限合并小的区域
- 区域的合适度距离
- 合并上面四种相似度
四、给区域打分
通过上述步骤,我们可以得到很多区域,但是并不是每个区域作为目标的可能性都是相同的,我们要进行筛选。
做法:给予最先合并的图片块较大的权重,比如最后一块完整图像权重为1,倒数第二次合并的区域权重为2,以此类推。但是当我们策略很多,多样性很多的时候,权重就会有太多的重合,这样排序就不太方便。我们可以给他们乘以一个随机数,然后对于相同的区域多次出现的也叠加下权重,毕竟多个方法都说你是目标,也是有理由的嘛。这样我们就得到所有区域的目标分数,也就可以根据自己的需要选择多少个区域了。
五、选择性搜索性能评估
自然地,通过算法计算得到的包含物体的Bounding Boxes与真实情况(ground truth)的窗口重叠越多,那么算法性能就越好。这是使用的指标是平均最高重叠率ABO(Average Best Overlap)。对于每个固定的类别c,每个真实情况(ground truth)表示为 ,令计算得到的位置假设L中的每个值lj,那么 ABO的公式表达为:
,令计算得到的位置假设L中的每个值lj,那么 ABO的公式表达为:


上面结果给出的是一个类别的ABO,对于所有类别下的性能评价,很自然就是使用所有类别的ABO的平均值MABO(Mean Average Best Overlap)来评价。
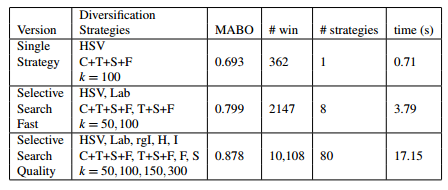
1、单一策略评估
我们可以通过改变多样性策略中的任何一种,评估选择性搜索的MABO性能指标。采取的策略如下:
- 使用RGB色彩空间
- 采用四中相似度计算的组合方式
- 设置图像分割的阈值k=50
2、多样性策略组合
我们使用贪婪搜索算法,把单一策略进行组合,会获得较高的MABO,但是也会造成计算成本的增加。

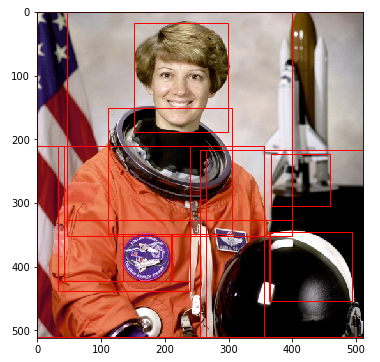
上图中绿色边框为对象的标记边框,红色边框为我们使用'Quality' Selective Search算法获得的Overlap最高的候选框。可以看到我们这个候选框和真实标记非常接近。
六、代码实现
我们可以通过下面的命令直接安装Selective Search包
pip install selectivesearch
然后从https://github.com/AlpacaDB/selectivesearch下载源码,运行example\example.py文件。效果如下:
# -*- coding: utf-8 -*-
from __future__ import (
division,
print_function,
) import skimage.data
import matplotlib.pyplot as plt
import matplotlib.patches as mpatches
import selectivesearch
import numpy as np def main(): # 加载图片数据
img = skimage.data.astronaut() '''
执行selective search,regions格式如下
[
{
'rect': (left, top, width, height),
'labels': [...],
'size': component_size
},
...
]
'''
img_lbl, regions = selectivesearch.selective_search(
img, scale=500, sigma=0.9, min_size=10) #计算一共分割了多少个原始候选区域
temp = set()
for i in range(img_lbl.shape[0]):
for j in range(img_lbl.shape[1]):
temp.add(img_lbl[i,j,3])
print(len(temp)) # #计算利用Selective Search算法得到了多少个候选区域
print(len(regions)) #
#创建一个集合 元素不会重复,每一个元素都是一个list(左上角x,左上角y,宽,高),表示一个候选区域的边框
candidates = set()
for r in regions:
#排除重复的候选区
if r['rect'] in candidates:
continue
#排除小于 2000 pixels的候选区域(并不是bounding box中的区域大小)
if r['size'] < 2000:
continue
#排除扭曲的候选区域边框 即只保留近似正方形的
x, y, w, h = r['rect']
if w / h > 1.2 or h / w > 1.2:
continue
candidates.add(r['rect']) #在原始图像上绘制候选区域边框
fig, ax = plt.subplots(ncols=1, nrows=1, figsize=(6, 6))
ax.imshow(img)
for x, y, w, h in candidates:
print(x, y, w, h)
rect = mpatches.Rectangle(
(x, y), w, h, fill=False, edgecolor='red', linewidth=1)
ax.add_patch(rect) plt.show() if __name__ == "__main__":
main()
参考文章:
https://www.cnblogs.com/zyly/p/9259392.html
图像分割—基于图的图像分割(Graph-Based Image Segmentation)(附代码)
https://github.com/AlpacaDB/selectivesearch(代码)
Selective Search for Object Recognition(推荐)
目标检测之选择性搜索-Selective Search的更多相关文章
- 第三十三节,目标检测之选择性搜索-Selective Search
在基于深度学习的目标检测算法的综述 那一节中我们提到基于区域提名的目标检测中广泛使用的选择性搜索算法.并且该算法后来被应用到了R-CNN,SPP-Net,Fast R-CNN中.因此我认为还是有研究的 ...
- 选择性搜索(Selective Search)
1 概述 本文牵涉的概念是候选区域(Region Proposal ),用于物体检测算法的输入.无论是机器学习算法还是深度学习算法,候选区域都有用武之地. 2 物体检测和物体识别 物体识别是要分辨出图 ...
- 目标检测中的选择性搜索-selective search-没弄
https://blog.csdn.net/small_munich/article/details/79595257 https://www.cnblogs.com/zyly/p/9259392.h ...
- 目标检测算法(1)目标检测中的问题描述和R-CNN算法
目标检测(object detection)是计算机视觉中非常具有挑战性的一项工作,一方面它是其他很多后续视觉任务的基础,另一方面目标检测不仅需要预测区域,还要进行分类,因此问题更加复杂.最近的5年使 ...
- 目标检测算法之Faster R-CNN算法详解
Fast R-CNN存在的问题:选择性搜索,非常耗时. 解决:加入一个提取边缘的神经网络,将候选框的选取交给神经网络. 在Fast R-CNN中引入Region Proposal Network(RP ...
- 目标检测算法之R-CNN算法详解
R-CNN全称为Region-CNN,它可以说是第一个成功地将深度学习应用到目标检测上的算法.后面提到的Fast R-CNN.Faster R-CNN全部都是建立在R-CNN的基础上的. 传统目标检测 ...
- 深度学习与CV教程(12) | 目标检测 (两阶段,R-CNN系列)
作者:韩信子@ShowMeAI 教程地址:http://www.showmeai.tech/tutorials/37 本文地址:http://www.showmeai.tech/article-det ...
- Selective Search for Object Recognition(理解)
0 - 背景 在目标检测任务中,我们希望输入一副图像,输出目标所在的位置以及目标的类别.最常用的算法是滑动窗口方法,但滑动窗口其实相当于穷举图像中的所有子图像,其效率低且精度也受限.该论文提出一种新的 ...
- 第二十九节,目标检测算法之R-CNN算法详解
Girshick, Ross, et al. “Rich feature hierarchies for accurate object detection and semantic segmenta ...
随机推荐
- 对象及变量的并发访问(同步方法、同步代码块、对class进行加锁、线程死锁)&内部类的基本用法
主要学习多线程的并发访问,也就是使得线程安全. 同步的单词为synchronized,异步的单词为asynchronized 同步主要就是通过锁的方式实现,一种就是隐式锁,另一种是显示锁Lock,本节 ...
- nodejs -Promise
创建一个 readFile.js,读取三个文件abc的内容并输出到控制台 var fs = require('fs') fs.readFile('./a.txt','utf-8',function ( ...
- 使用@JsonView注解控制返回的Json属性
我也是刚看到原来还可以这么玩,但是我还是习惯使用Dto,我总感觉这样做的话实体类耦合程度有点高.还是记录以下,万一今后用到了呢 ⒈在实体类中使用接口来声明该实体类的多个视图. ⒉在实体类的属性get方 ...
- MySQL常用的sql操作
1.日期时间格式化 2.日期时间格式化 3.查询第11到第15条数据 ,5//落过多少,取出多少. 4.字符串转日期 select str_to_date('2016-01-02', '%Y-%m-% ...
- Linux下查询文件的md5,sha1值
验证下载下来的文件包是不是一致 ··· 验证md5值 #md5sum filename 验证shal值 #sha1sum filename ···
- Python-查找两个文件中相同的ip地址
with open("testt","r") as f1: list1 = f1.readlines() print(list1) list1 = set(li ...
- nginx反向代理解决跨域
nginx作为反向代理服务器,就是把http请求转发到另一个或者一些服务器上.通过把本地一个url前缀映射到要跨域访问的web服务器上,就可以实现跨域访问.对于浏览器来说,访问的就是同源服务器上的一个 ...
- 关于session,cookie,Cache
昨天看了<ASP.NET 页面之间传值的几种方式>之后,对session,cookie,Cache有了更近一步的了解,以下是相关的内容 一.Session 1.Session基本操作 a. ...
- ORACLE 中ROWNUM
ORACLE 中ROWNUM用法总结! 对于 Oracle 的 rownum 问题,很多资料都说不支持>,>=,=,between...and,只能用以上符号(<.<=.!=) ...
- python操作三大主流数据库(1)python操作mysql①windows环境中安装python操作mysql数据库的MySQLdb模块mysql-client
windows安装python操作mysql数据库的MySQLdb模块mysql-client 正常情况下应该是cmd下直接运行 pip install mysql-client 命令即可,试了很多台 ...