NUC131演示如何通过PWM触发ADC。
今天我来讲讲PWM触发ADC的例程
/**************************************************************************** * @file main.c * @version V2.0
* $Revision: 5 $
* $Date: 14/06/30 4:51p $
* @brief Demonstrate how to trigger ADC by PWM.
* @note
* Copyright (C) 2014 Nuvoton Technology Corp. All rights reserved.
*
******************************************************************************/
#include <stdio.h>
#include "NUC131.h" #define PLL_CLOCK 50000000 /*---------------------------------------------------------------------------------------------------------*/
/* Define Function Prototypes */
/*---------------------------------------------------------------------------------------------------------*/
void SYS_Init(void); //系统初始化
void UART0_Init(void); //串口初始化
void ADC_PWMTrigTest_SingleOpMode(void); //ADC硬件触发测试 void SYS_Init(void) //选择时钟,选择模块,配置引脚
{
/*---------------------------------------------------------------------------------------------------------*/
/* Init System Clock */
/*---------------------------------------------------------------------------------------------------------*/ /* Enable Internal RC 22.1184MHz clock */
CLK_EnableXtalRC(CLK_PWRCON_OSC22M_EN_Msk); //选择内部RC时钟 /* Waiting for Internal RC clock ready */
CLK_WaitClockReady(CLK_CLKSTATUS_OSC22M_STB_Msk); /* Switch HCLK clock source to Internal RC and HCLK source divide 1 */
CLK_SetHCLK(CLK_CLKSEL0_HCLK_S_HIRC, CLK_CLKDIV_HCLK());//分频 /* Enable external XTAL 12MHz clock */
CLK_EnableXtalRC(CLK_PWRCON_XTL12M_EN_Msk); /* Waiting for external XTAL clock ready */
CLK_WaitClockReady(CLK_CLKSTATUS_XTL12M_STB_Msk); /* Set core clock as PLL_CLOCK from PLL */
CLK_SetCoreClock(PLL_CLOCK); /* Enable UART module clock */
CLK_EnableModuleClock(UART0_MODULE); /* Enable ADC module clock */
CLK_EnableModuleClock(ADC_MODULE); /* Enable PWM0 module clock */
CLK_EnableModuleClock(PWM0_MODULE); /* Select UART module clock source */
CLK_SetModuleClock(UART0_MODULE, CLK_CLKSEL1_UART_S_HXT, CLK_CLKDIV_UART()); /* Select PWM01 module clock source */
CLK_SetModuleClock(PWM0_MODULE, CLK_CLKSEL3_PWM0_S_PCLK, ); /* ADC clock source is 22.1184MHz, set divider to 7, ADC clock is 22.1184/7 MHz */
CLK_SetModuleClock(ADC_MODULE, CLK_CLKSEL1_ADC_S_HIRC, CLK_CLKDIV_ADC()); /*---------------------------------------------------------------------------------------------------------*/
/* Init I/O Multi-function */
/*---------------------------------------------------------------------------------------------------------*/ /* Set GPB multi-function pins for UART0 RXD and TXD */
SYS->GPB_MFP &= ~(SYS_GPB_MFP_PB0_Msk | SYS_GPB_MFP_PB1_Msk);//配置串口引脚
SYS->GPB_MFP |= SYS_GPB_MFP_PB0_UART0_RXD | SYS_GPB_MFP_PB1_UART0_TXD; /* Disable the GPA0 - GPA3 digital input path to avoid the leakage current. */
GPIO_DISABLE_DIGITAL_PATH(PA, 0xF);//禁用GPA0 - GPA3数字输入路径以避免泄漏电流 /* Configure the GPA0 - GPA3 ADC analog input pins */
SYS->GPA_MFP &= ~(SYS_GPA_MFP_PA0_Msk | SYS_GPA_MFP_PA1_Msk | SYS_GPA_MFP_PA2_Msk | SYS_GPA_MFP_PA3_Msk) ;//配置GPA
//0至PA3位为ADC模拟输入引脚
SYS->GPA_MFP |= SYS_GPA_MFP_PA0_ADC0 | SYS_GPA_MFP_PA1_ADC1 | SYS_GPA_MFP_PA2_ADC2 | SYS_GPA_MFP_PA3_ADC3 ;
//引脚复用
/* Configure the PA12 as PWM0 output pin */
SYS->GPA_MFP = (SYS->GPA_MFP & (~SYS_GPA_MFP_PA12_Msk));//配置PWM0的引脚
SYS->GPA_MFP |= SYS_GPA_MFP_PA12_PWM0_CH0;//PWM0的0通道
} /*---------------------------------------------------------------------------------------------------------*/
/* Init UART */
/*---------------------------------------------------------------------------------------------------------*/
void UART0_Init()//复位,和打开串口模块
{
/* Reset IP */
SYS_ResetModule(UART0_RST); /* Configure UART0 and set UART0 Baudrate */
UART_Open(UART0, );
} /*---------------------------------------------------------------------------------------------------------*/
/* Function: ADC_PWMTrigTest_SingleOpMode */
/* */
/* Parameters: */
/* None. */
/* */
/* Returns: */
/* None. */
/* */
/* Description: */
/* ADC hardware trigger test. ADC硬件触发测试。 */
/*---------------------------------------------------------------------------------------------------------*/
void ADC_PWMTrigTest_SingleOpMode()//这个得好好讲讲了 说明PWM是如何激发ADC进行读取的。
{
printf("\n<<< PWM trigger test (Single mode) >>>\n"); /* Set the ADC operation mode as single, input mode as single-end and enable the analog input channel 2 */
ADC_Open(ADC, ADC_ADCR_DIFFEN_SINGLE_END, ADC_ADCR_ADMD_SINGLE, 0x1 << );
//将ADC操作模式设置为单一模式,输入模式为单端,并启用模拟输入通道2 打开ADC通道 /* Power on ADC module */
ADC_POWER_ON(ADC);
//#define ADC_POWER_ON(adc) ((adc)->ADCR |= ADC_ADCR_ADEN_Msk)
//Before starting A/D conversion function, ADEN bit (ADCR[0]) should be set to 1.在启动A / D转换功能之前,应将ADEN位(ADCR [0])设置为1。 /* Configure the hardware trigger condition and enable hardware trigger; PWM trigger delay: (4*10) system clock cycles*/
ADC_EnableHWTrigger(ADC, ADC_ADCR_TRGS_PWM, );//配置硬件触发条件并启用硬件触发; PWM触发延迟:(4 * 10)个系统时钟周期
/******************************************************************************************************************************************************
/*
/**
* @brief Configure the hardware trigger condition and enable hardware trigger.配置硬件触发条件并启用硬件触发
* @param[in] adc The pointer of the specified ADC module.adc指定ADC模块的指针。
* @param[in] u32Source Decides the hardware trigger source. Valid values are: u32Source决定硬件触发源。
* - \ref ADC_ADCR_TRGS_STADC :A/D conversion is started by external STADC pin.A / D转换由外部STADC引脚启动
* - \ref ADC_ADCR_TRGS_PWM :A/D conversion is started by PWM.//A / D转换由PWM启动
* @param[in] u32Param ADC trigger by external pin, this parameter is used to set trigger condition. Valid values are://u32Param ADC由外部引脚触发,
//该参数用于设置触发条件。
* - \ref ADC_ADCR_TRGCOND_LOW_LEVEL :STADC Low level active.
* - \ref ADC_ADCR_TRGCOND_HIGH_LEVEL :STADC High level active.
* - \ref ADC_ADCR_TRGCOND_FALLING_EDGE :STADC Falling edge active.
* - \ref ADC_ADCR_TRGCOND_RISING_EDGE :STADC Rising edge active.
* @return None
* @details Software should disable TRGEN (ADCR[8]) and ADST (ADCR[11]) before change TRGS(ADCR[5:4]).
*/
void ADC_EnableHWTrigger(ADC_T *adc,
uint32_t u32Source,
uint32_t u32Param)
{
ADC->ADCR &= ~(ADC_ADCR_TRGS_Msk | ADC_ADCR_TRGCOND_Msk | ADC_ADCR_TRGEN_Msk); ADC->ADCR |= u32Source | u32Param | ADC_ADCR_TRGEN_Msk; return;
}
*******************************************************************************************************************************************************/ /* Clear the A/D interrupt flag for safe */
ADC_CLR_INT_FLAG(ADC, ADC_ADF_INT);//清除A / D中断标志以确保安全 /* Center-aligned type 该宏设置PWM对齐类型*/
PWM_SET_ALIGNED_TYPE(PWM0, PWM_CH_0_MASK, PWM_CENTER_ALIGNED);//中心对齐的类型
/******************************************************************************************************************************************************
/**
* @brief This macro set the PWM aligned type
* @param[in] pwm The pointer of the specified PWM module
* @param[in] u32ChannelMask Combination of enabled channels. Each bit corresponds to a channel. Every two channels share the same setting.
* Bit 0 represents channel 0, bit 1 represents channel 1...
* @param[in] u32AlignedType PWM aligned type, valid values are:
* - \ref PWM_EDGE_ALIGNED
* - \ref PWM_CENTER_ALIGNED
* @return None
* @details This macro is used to set the PWM aligned type of specified channel(s).
* \hideinitializer
*/
#define PWM_SET_ALIGNED_TYPE(pwm, u32ChannelMask, u32AlignedType) \
do{ \
int i; \
for(i = 0; i < 6; i++) { \
if((u32ChannelMask) & (1 << i)) \
(pwm)->CTL1 = (((pwm)->CTL1 & ~(3UL << ((i >> 1) << 2))) | ((u32AlignedType) << ((i >> 1) << 2))); \
} \
}while(0)02
*************************************************************************************************************************************************************/
/* Clock prescaler 时钟预分频器*/
PWM_SET_PRESCALER(PWM0, , );//该宏设置所选通道的预分频器
/********************************************************************************************************************************************************
/**
* @brief This macro set the prescaler of the selected channel
* @param[in] pwm The pointer of the specified PWM module
* @param[in] u32ChannelNum PWM channel number. Valid values are between 0~5 PWM通道
* @param[in] u32Prescaler Clock prescaler of specified channel. Valid values are between 1 ~ 0xFFF u32Prescaler指定通道的时钟预分频器。
// 有效值在1〜0xFFF之间
* @return None
* @details This macro is used to set the prescaler of specified channel.
* @note Every even channel N, and channel (N + 1) share a prescaler. So if channel 0 prescaler changed,
* channel 1 will also be affected.
* \hideinitializer
*/
#define PWM_SET_PRESCALER(pwm, u32ChannelNum, u32Prescaler) (*(__IO uint32_t *) (&((pwm)->CLKPSC0_1) + ((u32ChannelNum) >> 1)) = (u32Prescaler))
***********************************************************************************************************************************************************************/
/* PWM counter value */ /* PWM frequency = PWM clock source/(clock prescaler setting + 1)/(CNR+1) */
PWM_SET_CNR(PWM0, , );//该宏设置所选通道的周期
/**********************************************************************************************************************************************************
/**
* @brief This macro set the period of the selected channel
* @param[in] pwm The pointer of the specified PWM module
* @param[in] u32ChannelNum PWM channel number. Valid values are between 0, 2, 4. Every two channels share the same setting.
* @param[in] u32CNR Period of specified channel. Valid values are between 0~0xFFFF
* @return None
* @details This macro is used to set the period of specified channel.
* @note This new setting will take effect on next PWM period.
* @note PWM counter will stop if period length set to 0.
* \hideinitializer
*/
#define PWM_SET_CNR(pwm, u32ChannelNum, u32CNR) ((pwm)->PERIOD[(((u32ChannelNum) >> 1) << 1)] = (u32CNR))
/**
* @brief This macro set the comparator of the selected channel
* @param[in] pwm The pointer of the specified PWM module
* @param[in] u32ChannelNum PWM channel number. Valid values are between 0~5
* @param[in] u32CMR Comparator of specified channel. Valid values are between 0~0xFFFF
* @return None
* @details This macro is used to set the comparator of specified channel.
* @note This new setting will take effect on next PWM period.
* \hideinitializer
*/
#define PWM_SET_CMR(pwm, u32ChannelNum, u32CMR) ((pwm)->CMPDAT[(u32ChannelNum)] = (u32CMR))
**********************************************************************************************************************************************************/
/* PWM compare value */
PWM_SET_CMR(PWM0, , );
/*******************************************************************************************************************************************************
/**
* @brief This macro set the comparator of the selected channel 该宏设置所选通道的比较器
* @param[in] pwm The pointer of the specified PWM module
* @param[in] u32ChannelNum PWM channel number. Valid values are between 0~5
* @param[in] u32CMR Comparator of specified channel. Valid values are between 0~0xFFFF 指定通道的u32CMR比较器。 有效值在0〜0xFFFF之间
* @return None
* @details This macro is used to set the comparator of specified channel.该宏用于设置指定通道的比较器。
* @note This new setting will take effect on next PWM period.这个新设置将在下一个PWM周期生效。
* \hideinitializer
*/
#define PWM_SET_CMR(pwm, u32ChannelNum, u32CMR) ((pwm)->CMPDAT[(u32ChannelNum)] = (u32CMR))
***************************************************************************************************************************************************************/
/* Enable PWM0 to trigger ADC */
PWM_EnableADCTrigger(PWM0, , PWM_TRIGGER_ADC_EVEN_PERIOD_POINT);//使能PWM来触发ADC
/******************************************************************************************************************************************************
/**
* @brief Enable selected channel to trigger ADC
* @param[in] pwm The pointer of the specified PWM module
* - PWM0 : PWM Group 0
* - PWM1 : PWM Group 1
* @param[in] u32ChannelNum PWM channel number. Valid values are between 0~5
* @param[in] u32Condition The condition to trigger ADC. Combination of following conditions:
* - \ref PWM_TRIGGER_ADC_EVEN_ZERO_POINT
* - \ref PWM_TRIGGER_ADC_EVEN_PERIOD_POINT
* - \ref PWM_TRIGGER_ADC_EVEN_ZERO_OR_PERIOD_POINT
* - \ref PWM_TRIGGER_ADC_EVEN_COMPARE_UP_COUNT_POINT
* - \ref PWM_TRIGGER_ADC_EVEN_COMPARE_DOWN_COUNT_POINT
* - \ref PWM_TRIGGER_ADC_ODD_COMPARE_UP_COUNT_POINT
* - \ref PWM_TRIGGER_ADC_ODD_COMPARE_DOWN_COUNT_POINT
#define PWM_TRIGGER_ADC_EVEN_ZERO_POINT (0UL)
/*!< PWM trigger ADC while counter of even channel matches zero point */PWM触发ADC,偶数通道计数器匹配零点
#define PWM_TRIGGER_ADC_EVEN_PERIOD_POINT (1UL)
/*!< PWM trigger ADC while counter of even channel matches period point */当偶数通道计数器匹配周期点时,PWM触发ADC
#define PWM_TRIGGER_ADC_EVEN_ZERO_OR_PERIOD_POINT (2UL)
/*!< PWM trigger ADC while counter of even channel matches zero or period point */PWM触发ADC,偶数通道计数器匹配零点或周期点
#define PWM_TRIGGER_ADC_EVEN_COMPARE_UP_COUNT_POINT (3UL)
/*!< PWM trigger ADC while counter of even channel matches up count to comparator point */当偶数通道计数器匹配时PWM触发ADC计数到比较器点
#define PWM_TRIGGER_ADC_EVEN_COMPARE_DOWN_COUNT_POINT (4UL)
/*!< PWM trigger ADC while counter of even channel matches down count to comparator point */PWM触发ADC,而偶数通道计数器的匹配下降计数到比较点
#define PWM_TRIGGER_ADC_ODD_COMPARE_UP_COUNT_POINT (8UL)
/*!< PWM trigger ADC while counter of odd channel matches up count to comparator point */PWM触发ADC将奇数通道计数器匹配到比较器点数
#define PWM_TRIGGER_ADC_ODD_COMPARE_DOWN_COUNT_POINT (9UL)
/*!< PWM trigger ADC while counter of odd channel matches down count to comparator point */PWM触发ADC将奇数通道计数器下降计数到比较点 * @return None
* @details This function is used to enable selected channel to trigger ADC.
*/
void PWM_EnableADCTrigger(PWM_T *pwm, uint32_t u32ChannelNum, uint32_t u32Condition)
{
if(u32ChannelNum < 4)
{
(pwm)->ADCTS0 &= ~((PWM_ADCTS0_TRGSEL0_Msk) << (u32ChannelNum * 8));
(pwm)->ADCTS0 |= ((PWM_ADCTS0_TRGEN0_Msk | u32Condition) << (u32ChannelNum * 8));
}
else
{
(pwm)->ADCTS1 &= ~((PWM_ADCTS1_TRGSEL4_Msk) << ((u32ChannelNum - 4) * 8));
(pwm)->ADCTS1 |= ((PWM_ADCTS1_TRGEN4_Msk | u32Condition) << ((u32ChannelNum - 4) * 8));
}
}
*************************************************************************************************************************************************************/
/* PWM0 pin output enabled */
PWM_SET_OUTPUT_LEVEL(PWM0, PWM_CH_0_MASK, PWM_OUTPUT_HIGH, PWM_OUTPUT_NOTHING, PWM_OUTPUT_LOW, PWM_OUTPUT_NOTHING);
/*******************************************************************************************************************************************************
/**
* @brief Set output level at zero, compare up, period(center) and compare down of specified channel(s)
将输出电平设置为零,比较上升,指定通道的周期(中心)和比较下降
* @param[in] pwm The pointer of the specified PWM module //
* @param[in] u32ChannelMask Combination of enabled channels. Each bit corresponds to a channel
u32ChannelMask已启用通道的组合。 每一位对应一个通道
* Bit 0 represents channel 0, bit 1 represents channel 1...
* @param[in] u32ZeroLevel output level at zero point, valid values are:
u32ZeroLevel输出电平在零点,有效值是:
* - \ref PWM_OUTPUT_NOTHING
* - \ref PWM_OUTPUT_LOW
* - \ref PWM_OUTPUT_HIGH
* - \ref PWM_OUTPUT_TOGGLE
* @param[in] u32CmpUpLevel output level at compare up point, valid values are:
u32CmpUpLevel比较点的输出电平,有效值为:
* - \ref PWM_OUTPUT_NOTHING
* - \ref PWM_OUTPUT_LOW
* - \ref PWM_OUTPUT_HIGH
* - \ref PWM_OUTPUT_TOGGLE
* @param[in] u32PeriodLevel output level at period(center) point, valid values are:
周期(中心)点的u32PeriodLevel输出电平,有效值为:
* - \ref PWM_OUTPUT_NOTHING
* - \ref PWM_OUTPUT_LOW
* - \ref PWM_OUTPUT_HIGH
* - \ref PWM_OUTPUT_TOGGLE
* @param[in] u32CmpDownLevel output level at compare down point, valid values are:
@param [in] u32CmpDownLevel比较下来的输出级别,有效值是:
* - \ref PWM_OUTPUT_NOTHING
* - \ref PWM_OUTPUT_LOW
* - \ref PWM_OUTPUT_HIGH
* - \ref PWM_OUTPUT_TOGGLE
* @return None
* @details This macro is used to Set output level at zero, compare up, period(center) and compare down of specified channel(s).
* \hideinitializer
*/
#define PWM_SET_OUTPUT_LEVEL(pwm, u32ChannelMask, u32ZeroLevel, u32CmpUpLevel, u32PeriodLevel, u32CmpDownLevel) \
do{ \
int i; \
for(i = 0; i < 6; i++) { \
if((u32ChannelMask) & (1 << i)) { \
(pwm)->WGCTL0 = (((pwm)->WGCTL0 & ~(3UL << (2 * i))) | ((u32ZeroLevel) << (2 * i))); \
(pwm)->WGCTL0 = (((pwm)->WGCTL0 & ~(3UL << (PWM_WGCTL0_PRDPCTLn_Pos + (2 * i)))) | \
((u32PeriodLevel) << (PWM_WGCTL0_PRDPCTLn_Pos + (2 * i)))); \
(pwm)->WGCTL1 = (((pwm)->WGCTL1 & ~(3UL << (2 * i))) | ((u32CmpUpLevel) << (2 * i))); \
(pwm)->WGCTL1 = (((pwm)->WGCTL1 & ~(3UL << (PWM_WGCTL1_CMPDCTLn_Pos + (2 * i)))) | \
((u32CmpDownLevel) << (PWM_WGCTL1_CMPDCTLn_Pos + (2 * i)))); \
} \
} \
}while(0)
**********************************************************************************************************************************************************************************************************/ PWM_EnableOutput(PWM0, PWM_CH_0_MASK);
/***************************************************************************************************************************************************** /* Start PWM module */
PWM_Start(PWM0, PWM_CH_0_MASK); /* wait for one cycle */
while(PWM_GetPeriodIntFlag(PWM0, ) == );
while(PWM_GetZeroIntFlag(PWM0, ) == );
PWM_ClearPeriodIntFlag(PWM0, );
PWM_ClearZeroIntFlag(PWM0, );
/********************************************************************************************************************************************************
/**
* @brief Get period interrupt of selected channel 获取选定通道的周期中断
* @param[in] pwm The pointer of the specified PWM module
* - PWM0 : PWM Group 0
* - PWM1 : PWM Group 1
* @param[in] u32ChannelNum PWM channel number. Valid values are between 0~5. Every two channels share the same setting.
* @return Period interrupt flag of specified channel
* @retval 0 Period interrupt did not occur
* @retval 1 Period interrupt occurred
* @details This function is used to get period interrupt of selected channel.
*/
uint32_t PWM_GetPeriodIntFlag(PWM_T *pwm, uint32_t u32ChannelNum)
{
return (((pwm)->INTSTS0 & (PWM_INTSTS0_PIF0_Msk << ((u32ChannelNum >> 1) << 1))) ? 1 : 0);
}
/**
* @brief Get zero interrupt of selected channel 获取所选通道的零中断
* @param[in] pwm The pointer of the specified PWM module
* - PWM0 : PWM Group 0
* - PWM1 : PWM Group 1
* @param[in] u32ChannelNum PWM channel number. Valid values are between 0~5. Every two channels share the same setting.
* @return zero interrupt flag of specified channel
* @retval 0 zero interrupt did not occur
* @retval 1 zero interrupt occurred
* @details This function is used to get zero interrupt of selected channel.
*/
uint32_t PWM_GetZeroIntFlag(PWM_T *pwm, uint32_t u32ChannelNum)
{
return (((pwm)->INTSTS0 & (PWM_INTSTS0_ZIF0_Msk << ((u32ChannelNum >> 1) << 1))) ? 1 : 0);
}
/**
* @brief Stop PWM generation immediately by clear channel enable bit
* @param[in] pwm The pointer of the specified PWM module
* - PWM0 : PWM Group 0
* - PWM1 : PWM Group 1
* @param[in] u32ChannelMask Combination of enabled channels. Each bit corresponds to a channel.
* Bit 0 is channel 0, bit 1 is channel 1...
* @return None
* @details This function is used to stop PWM generation immediately by clear channel enable bit. 该功能用于通过清除通道使能位立即停止PWM的产生。
*/
void PWM_ForceStop(PWM_T *pwm, uint32_t u32ChannelMask)
{
uint32_t i;
for(i = 0; i < PWM_CHANNEL_NUM; i ++)
{
if(u32ChannelMask & (1 << i))
{
(pwm)->CNTEN &= ~(1UL << ((i >> 1) << 1));
}
}
}
/**
* @brief Return the user-specified interrupt flags. 返回用户指定的中断标志。
* @param[in] adc The pointer of the specified ADC module.
* @param[in] u32Mask The combination of following interrupt status bits. Each bit corresponds to a interrupt status.//u32Mask以下中断状态位的组合。 每个位对应一个中断状态
* Valid values are:
* - \ref ADC_ADF_INT :Convert complete interrupt flag.
* - \ref ADC_CMP0_INT :Comparator 0 interrupt flag.
* - \ref ADC_CMP1_INT :Comparator 1 interrupt flag.
* @return User specified interrupt flags.
* @details Get the status of the ADC interrupt flag.
*/
#define ADC_GET_INT_FLAG(adc, u32Mask) ((adc)->ADSR & (u32Mask))
**************************************************************************************************************************************************************/
/* Stop PWM generation */
PWM_ForceStop(PWM0, PWM_CH_0_MASK); /* Wait conversion done */
while(!ADC_GET_INT_FLAG(ADC, ADC_ADF_INT)); /* Clear the ADC interrupt flag */
ADC_CLR_INT_FLAG(ADC, ADC_ADF_INT); printf("Channel 2: 0x%X\n", ADC_GET_CONVERSION_DATA(ADC, ));//ADC获取转换数据 /* Disable ADC */
ADC_POWER_DOWN(ADC);
/*********************************************************************************************************************************************************
///**
*提示关闭ADC模块。
* @param [in] adc指定ADC模块的指针。
* @返回无
* @details禁用A / D转换器模拟电路以节省功耗。
* @note无
*/
#define ADC_POWER_DOWN(adc)((adc) - > ADCR&=〜ADC_ADCR_ADEN_Msk)
***********************************************************************************************************************************************************/
/*---------------------------------------------------------------------------------------------------------*/
/* MAIN function */
/*---------------------------------------------------------------------------------------------------------*/
int32_t main(void) { /* Unlock protected registers */
SYS_UnlockReg(); /* Init System, IP clock and multi-function I/O */
SYS_Init(); /* Lock protected registers */
SYS_LockReg(); /* Init UART0 for printf */
UART0_Init();
/*---------------------------------------------------------------------------------------------------------*/
/* SAMPLE CODE */
/*---------------------------------------------------------------------------------------------------------*/
printf("\nSystem clock rate: %d Hz", SystemCoreClock);
/* ADC hardware trigger test */
ADC_PWMTrigTest_SingleOpMode();
/* Disable ADC module */
ADC_Close(ADC);
/* Disable ADC IP clock */
CLK_DisableModuleClock(ADC_MODULE);
/* Disable External Interrupt */
NVIC_DisableIRQ(ADC_IRQn);
printf("\nExit ADC sample code\n");
while();
}
信号的周期由装入PTPER 的值指定, 其占空比由相应的PDCx 寄存器指定(参见图15-7 )。
设占空比非零且立即更新未被使能( IUE = 0),所有使能的PWM 发生器的输出在PWM 周期开
始( PTMR = 0)时被驱动为有效。当PTMR 的值与PWM 发生器的占空比值发生匹配时,各
PWM 输出都被驱动为无效。
如果PDCx 寄存器中的值为0,则相应的PWM 引脚的输出在整个PWM 周期内都将为无效。此
外,如果PDCx 寄存器中的值大于PTPER 寄存器中保存的值, 那么PWM 引脚的输出在整个
PWM 周期内都将有效。
如果使能了立即更新( IUE = 1),则在新值写入任一有效的PDC 寄存器时,新的占空比值即被
装入。
看了这么多,有些乱了吧,不要着急,后面是对这个程序的详细说明,做技术要有耐心,细心
这个程序是说,选定PWM如何触发ADC的取值,在示波器上观察波形,在串口上观察ADC读取的数据, PWM选取了通道0,ADC选取了通道2,也就是说ADC通道2读取到的数值,通过PWM0触发了ADC的取值。
void ADC_PWMTrigTest_SingleOpMode()
{
printf("\n<<< PWM trigger test (Single mode) >>>\n"); /* Set the ADC operation mode as single, input mode as single-end and enable the analog input channel 2 */
ADC_Open(ADC, ADC_ADCR_DIFFEN_SINGLE_END, ADC_ADCR_ADMD_SINGLE, 0x1 << );//操作模式选为单段输入模式,输入模式位单一模式 /* Power on ADC module */
ADC_POWER_ON(ADC); /* Configure the hardware trigger condition and enable hardware trigger; PWM trigger delay: (4*10) system clock cycles*/
ADC_EnableHWTrigger(ADC, ADC_ADCR_TRGS_PWM, );//硬件触发条件 /* Clear the A/D interrupt flag for safe */
ADC_CLR_INT_FLAG(ADC, ADC_ADF_INT); /* Center-aligned type */
PWM_SET_ALIGNED_TYPE(PWM0, PWM_CH_4_MASK, PWM_CENTER_ALIGNED);
/* Clock prescaler */
PWM_SET_PRESCALER(PWM0, , );
/* PWM counter value */ /* PWM frequency = PWM clock source/(clock prescaler setting + 1)/(CNR+1) */
PWM_SET_CNR(PWM0, , );
/* PWM compare value */
PWM_SET_CMR(PWM0, , );
/* Enable PWM0 to trigger ADC */
PWM_EnableADCTrigger(PWM0, , PWM_TRIGGER_ADC_EVEN_PERIOD_POINT);
/* PWM0 pin output enabled */
PWM_SET_OUTPUT_LEVEL(PWM0, PWM_CH_0_MASK, PWM_OUTPUT_HIGH, PWM_OUTPUT_NOTHING, PWM_OUTPUT_LOW, PWM_OUTPUT_NOTHING); PWM_EnableOutput(PWM0, PWM_CH_0_MASK); /* Start PWM module */
PWM_Start(PWM0, PWM_CH_0_MASK); /* wait for one cycle */
while(PWM_GetPeriodIntFlag(PWM0, ) == );
while(PWM_GetZeroIntFlag(PWM0, ) == );
PWM_ClearPeriodIntFlag(PWM0, );
PWM_ClearZeroIntFlag(PWM0, ); /* Stop PWM generation */
PWM_ForceStop(PWM0, PWM_CH_0_MASK); /* Wait conversion done */
while(!ADC_GET_INT_FLAG(ADC, ADC_ADF_INT)); /* Clear the ADC interrupt flag */
ADC_CLR_INT_FLAG(ADC, ADC_ADF_INT); printf("Channel 2: 0x%X\n", ADC_GET_CONVERSION_DATA(ADC, )); /* Disable ADC */
ADC_POWER_DOWN(ADC); while();
}
PWM0通道发出波形,ADC2通道读取数值。
A/D转换器支持三种操作模式:单一(single),单周期扫描(single-cycle scan)和连续扫描模式(continuous scan mode)。A/D转换器可由软件、PWM、BPWM触发器和外部STADC管脚启动转换。
输入模式分为单端输入和差分输入模式。


差分输入方式:差分输入的是将两个输入端的差值作为信号,这样可以免去一些误差,比如输入一个1V的信号电源有偏差,比实际输入要大0.1.就可以用差分输入1V和2V,一减就把两端共有的那0.1误差剪掉了。单端输入无法去除这类误差。
一个差分信号是用一个数值来表示两个物理量之间的差异。从严格意义上来讲,所有电压信号都是差分的,因为一个电压只能是相对于另一个电压而言的。
在某些系统里,系统'地'被用作电压基准点。当'地'当作电压测量基准时,这种信号规划被称之为单端的。使用该术语是因为信号是用单个导体上的电压来表示的。
另一方面,一个差分信号作用在两个导体上。信号值是两个导体间的电压差。尽管不是非常必要,这两个电压的平均值还是会经常保持一致。 这里有一个网友问的关于TI的一个关于ADC的问题,或许有助于了解一下ADC的输入模式(单端或差分):
硬件触发源
1.外部STADC引脚启动
2.由PWM启动
硬件触发条件分为
1.ADC_ADCR_TRGCOND_LOW_LEVEL
2.ADC_ADCR_TRGCOND_HIGH_LEVEL
3.ADC_ADCR_TRGCOND_FALLING_EDGE
4.ADC_ADCR_TRGCOND_RISING_EDGE
PWM_SET_OUTPUT_LEVEL函数的四个参数:
1.输出电平在零点
2.比较点的输出电平,
3.周期(中心)点的输出电平,
4.比较下来的输出级别,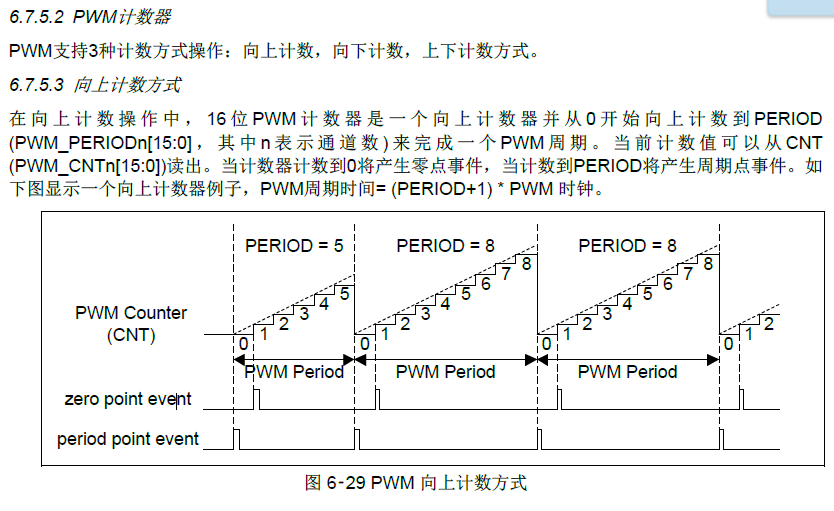
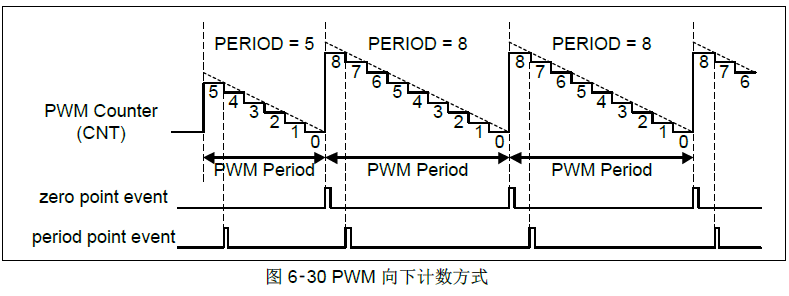
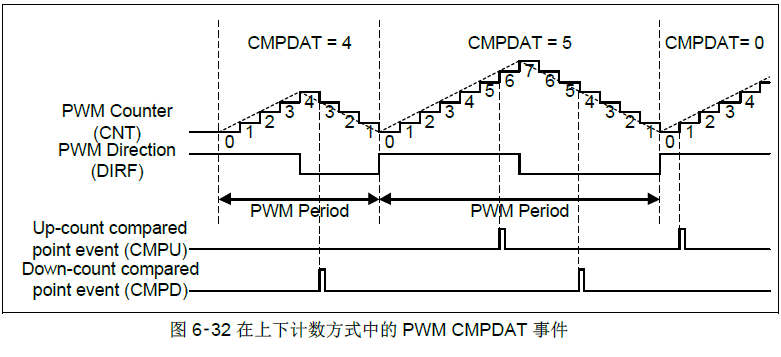
关于零点事件与周期时间,你是否明白了?还有就是比较器事件

采样一个信号,以前直接放大送给ADC。TI很多ADC(只关注16bit的系列)的模拟信号输入端都是AINP/AINN,即支持差分输入。我的问题是:
1:这个差分输入和和单端输入在本质 上到底有什么区别? 因为,ADC采集的信号说到底是AINP - AINN,不管单端还是差分,采集的信号都是这两个pad的差值。
差分信号是 AINP - AINN
单端信号是 AIN - REFN
2:将单端信号接在ADC的差分输入接口上可以用吗?可以
3:如果将差分放大器输出的差分信号,接在只支持单端信号输入的ADC,会正常工作吗?不会,结果会出现错误
PWM中断触发ADC采样和ADC中断是一个东西吗?
首先要区分adc在这里扮演的角色,pwm中断出发adc采样是去读取某个参数,而adc中断是在某个参数达到一定限制时发出一个中断。性质不一样的哩。
PWM触发ADC启动转换有什么用
典型应用是电机控制里面的相电流控制,pwm打开之后ADC对相电流同步采样,然后做电流PID反馈环
简单地说,补码就是反码加1。
计算机中为什么要使用补码呢?
主要原因:1、使用补码,可以将符号位和其它位统一处理;同时,减法也可按加法来处理。另外,两个用补 码表示的数相加时,如果最高位(符号位)有进位,则进位被舍弃。
2、补码与原码的转换过程几乎是相同的。
(1)正数的补码
与原码相同。 【例1】+9的补码是00001001。(备注:这个+9的补码说的是用8位的2进制来表示补码的,补码表示方式很多,还有16位2进制补码表示形式,以及32位2进制补码表示形式等。)
(2)负数的补码
符号位为1,其余位为该数绝对值的原码按位取反;然后整个数加1。 同一个数字在不同的补码表示形式里头,是不同的。比方说-15的补码,在8位2进制里头是11110001,然而在16位2进制补码表示的情况下,就成了1111111111110001。在这篇补码概述里头涉及的补码转换默认了把一个数转换成8位2进制的补码形式,每一种补码表示形式都只能表示有限的数字。 【例2】求-7的补码。
因为给定数是负数,则符号位为“1”。
后七位:+7的原码(0000111)→按位取反(1111000)→加1(1111001)
所以-7的补码是11111001。
已知一个数的补码,求原码的操作分两种情况:
(1)如果补码的符号位为“0”,表示是一个正数,其原码就是补码。
(2)如果补码的符号位为“1”,表示是一个负数,那么求给定的这个补码的补码就是要求的原码。
另一种方法求负数的补码如下:
例如:求-15的补码
第一步:+15:00001111
第二步:逐位取反(1变成0,0变成1),然后在末尾加1。
11110001
再举一个例子验证下:求-64的补码
+64:01000000
11000000
【例3】已知一个补码为11111001,则原码是10000111(-7)。
因为符号位为“1”,表示是一个负数,所以该位不变,仍为“1”。
其余七位1111001取反后为0000110;
再加1,所以是10000111。
NUC131演示如何通过PWM触发ADC。的更多相关文章
- RTT学习之PWM、ADC设备
一 使用步骤: 查找 PWM 设备获取设备句柄.rt_device_find() 设置 PWM 周期和脉冲宽度.rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, ...
- STM32定时器触发ADC多通道连续采样,DMA缓存结果
STM32的ADC使用非常灵活,采样触发方面:既支持软件触发,定时器或其他硬件电路自动触发,也支持转换完成后自动触发下一通道/轮转换.转换结果存储方面:既支持软件读取和转存,也支持DMA自动存储转换结 ...
- PWM实现ADC和DAC
一.PWM实现AD 利用普通单片机的2个IO及一个运算放大器即可实现AD转换电路,而且很容易扩展成多通道.其占用资源少,成本低,AD 转换精度可以达到8位甚至更高,因此具有一定的实用价值. 1.1 硬 ...
- BLDC有感FOC算法理论及其STM32软硬件实现
位置传感器:旋转编码器 MCU:STM32F405RGT6 功率MOS驱动芯片:DRV8301 全文均假设在无弱磁控制的情况下 FOC算法理论 首先,我们要知道FO ...
- ADC配置成定时器触发的启发
百度文库:https://wenku.baidu.com/view/99d39413f78a6529647d5344.html STM32关于使用定时器触发ADC转换的解决办法和详细说明 本人在使用S ...
- STM32F103ZET6 之 ADC+TIM+DMA+USART 综合实验
1.实验目的 1)使用 TIM1 触发 ADC,ADC 采集的数据通过DMA 传至内存,然后通过串口打印出采集的数据: 2)学会 DMA 传输数据并将数据进行保存: 3)验证ADC 的采样率与实际设置 ...
- 四轴遥控器ADC部分
一.ADC参考手册学习 A/D转换可以按单次.连续设置采样:可以一一扫描或间断的对多个ADC通道进行采集. ADC的结果有左对齐和右对齐. ADC的输入时钟不得超过14Mhz,它是由PCLK2经分频产 ...
- WS2812B彩灯详细讲解篇(STM32 PWM+DMA控制 STM32 HAL库编程 循环延时控制多种控制方式)
一.效果展示 观看演示效果:https://www.bilibili.com/video/BV1JT4y1P72Q 二. 基础认识 (一) 小理论 WS2812B是一种智能控制LED光源,将控制电路 ...
- 用STM32内置的高速ADC实现简易示波器
做一个数字采样示波器一直是我长久以来的愿望,不过毕竟这个目标难度比较大,涉及的方面实在太多,模拟前端电路.高速ADC.单片机.CPLD/FPGA.通讯.上位机程序.数据处理等等,不是一下子就能成的,慢 ...
随机推荐
- Hdu1163 Eddy's digitai Roots(九余数定理)
题目大意: 给定一个正整数,根据一定的规则求出该数的“数根”,其规则如下: 例如给定 数字 24,将24的各个位上的数字“分离”,分别得到数字 2 和 4,而2+4=6: 因为 6 < 10,所 ...
- RTX——第15章 互斥信号量
以下内容转载自安富莱电子: http://forum.armfly.com/forum.php 本章节开始讲解 RTX 的另一个重要的资源共享机制---互斥信号量(Mutex,即 Mutual Exc ...
- [转]C#读取Word指定页的内容
/// <summary> /// Word按页读取内容 /// </summary> /// <param name="page">页数< ...
- 关于使用samba用户的权限设置
首先要保证你的samba安装并配置好,关于安装和配置samba请参考此文章http://blog.csdn.net/linglongwunv/archive/2010/01/19/5212875.as ...
- 【转】【Unity】DateTime各种时间字符串
各种表示时间的方法 谢谢网络上的大神 此片为转载的文章 DateTime.Now.ToShortTimeString() DateTime dt = DateTime.Now; dt.ToString ...
- 在Linux下制作一个磁盘文件,在u-boot 阶段对emmc 烧写整个Linux系统方法
在Linux 下制作一个磁盘文件, 可以给他分区,以及存储文件,然后dd 到SD卡便可启动系统. 在u-boot 下启动后可以读取该文件,直接在u-boot 阶段就可以做烧写操作,省略了进入系统后才进 ...
- ramdisk文件系统制作
1. 确保内核支持ramdisk启动.2. 创建根文件系统(应用busybox或拷贝现有文件系统).3. 利用脚本mkroot.sh创建内核镜像:root.img.gz.4. uboot通过t ...
- Java命令学习系列(三)——Jmap
Java命令学习系列(三)——Jmap 2015-05-16 分类:Java 阅读(479) 评论(0) Jmap jmap是JDK自带的工具软件,主要用于打印指定Java进程(或核心文件.远程调试服 ...
- 系统优化 /etc/sysctl.conf
# sysctl settings are defined through files in # /usr/lib/sysctl.d/, /run/sysctl.d/, and /etc/sysctl ...
- Entity Framework管理实体关系(一):管理一对一关系
我们现在已经知道如何使用Code First来定义简单的领域类,并且如何使用DbContext类来执行数据库操作.现在我们来看下数据库理论中的多样性关系,我们会使用Code First来实现下面的几种 ...