Slam笔记I
视觉Slam笔记I
第二讲-三位空间刚体运动
点与坐标系:
基础概念:
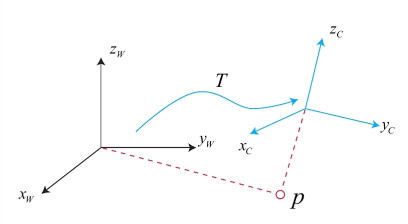
坐标系:左手系和右手系。右手系更常用。定义坐标系时,会定义世界坐标系,相机坐标系,以及其他关心对象的坐标系。空间中任意一点可由空间的基的线性表出。
加减法:用坐标描述更方便。
内积:点乘得数,即
外积:叉乘得向量,即
 右手系下,得到按照右手定则获取的向量。
右手系下,得到按照右手定则获取的向量。坐标系间的变换:
通过平移(向量的加减)和旋转(有多种描述方式,见下)2D情况:二维坐标点表示位置+一个旋转角表示朝向。
3D情况:三维坐标点表示位置+一个旋转角(角度间的变换使用旋转,旋转方式有多种,见下)。
旋转矩阵:(描述旋转的第一种方式)
坐标系 (e_1,e_2,e_3)经过旋转变成 (e'_1,e'_2,e'_3),在三维空间中,向量 a保持不动,那么如何表出它在 (e'_1,e'_2,e'_3)下的坐标:
- 线性表出法向量
a坐标:两坐标系实质是分别用两组不同的基去表示同一个点,则两者的线性组合是相等的: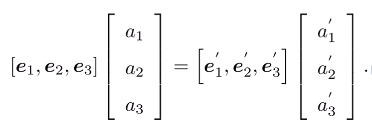
- 左右两边同时左乘
(e_1,e_2,e_3)的转置,得到: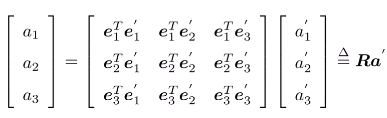
- R即为旋转矩阵。
- 性质:
- R是一个正交矩阵(矩阵的逆即矩阵的转置,或转置×本身即为一个单位矩阵)。
- R的行列式值为1。
- 满足上述性质的矩阵都可以称为旋转矩阵,使用集合表示:
 ,又称特殊正交群SO(3)。
,又称特殊正交群SO(3)。 - 固定表示方式(下标顺序):
 且满足矩阵关系:
且满足矩阵关系: 。
。
因此,空间中不同坐标系下点坐标的变换可以使用: 即旋转+平移的形式完全描述
即旋转+平移的形式完全描述
- 理论依据:欧拉定理,刚体在三维空间中的一般运动,可分解为刚体上方某一点的平移,以及绕经过此点的旋转轴的转动。
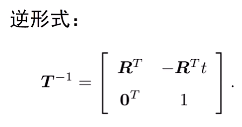
但是,这种表示方式在多次进行变换时会有不便( ),因此使用增广的方式进行表示:
),因此使用增广的方式进行表示:

- 其中,
 称为变换矩阵,
称为变换矩阵, 的形式称为齐次坐标。
的形式称为齐次坐标。 - 齐次坐标性质:齐次坐标乘上任意非0常数时仍表达同一坐标
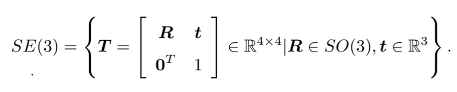
- 变换矩阵的集合:称为特殊欧式群SE(3):
旋转向量和欧拉角:
旋转矩阵在实际中更常用,但这些概念也是需要清楚的。
旋转矩阵R是一个3×3的矩阵,有九个元素,但仅有三个自由度,也就是存在描述方式上的冗余,那么能否以更少的元素表达旋转?
刚体旋转存在一个转轴(向量),还有转过的角度,于是想用角度乘以向量(单位化过后)的形式去描述旋转。
旋转向量
一个向量,方向为旋转轴方向,长度为转过的角度。(单位向量乘角度大小)
又称角轴/轴角。
罗德里格斯公式可以将旋转向量(n,theta)转换成旋转矩阵R:

旋转矩阵R也可以转换成旋转向量(n,theta):
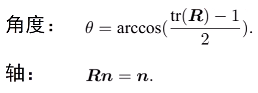 n是特征向量。
n是特征向量。
欧拉角
- 将旋转分解成三个方向上的转动,常用顺序为yaw-pitch-roll(也就是绕Z-Y-X方式转,注意 ,不同地方在绕Z转之后,所绕的Y轴可能是原来的Y轴,也可能是转动后的Y轴)

- 万向锁(Gimbal Lock):欧拉角存在奇异性(特定值下,旋转的自由度减1)
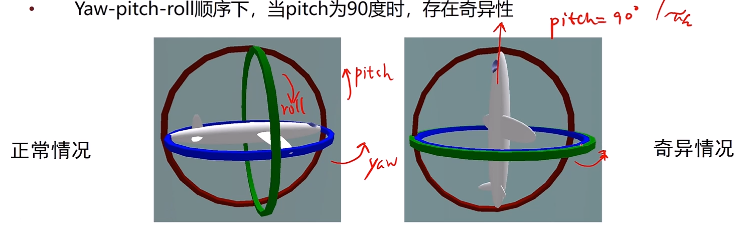 在pitch方向旋转完毕后,roll方向旋转和yaw方向旋转是重合的。由此,欧拉角不适合插值或迭代,故不常用。
在pitch方向旋转完毕后,roll方向旋转和yaw方向旋转是重合的。由此,欧拉角不适合插值或迭代,故不常用。
四元数:
吸取了旋转矩阵和旋转向量、欧拉角的优点,是一种优秀的描述方式。
- 2D情况下,可以用单位复数表达旋转:
\]
- 用z乘以i,相当于旋转了90度(
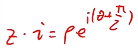 ),乘-i转动-90度。
),乘-i转动-90度。
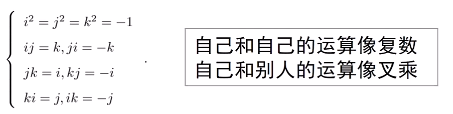
在三维情况下,四元数可作为扩充定义的复数
特点1:有三个虚部+一个实部

特点2:虚部之间存在关系:
单位四元数可以表达三维空间的旋转:

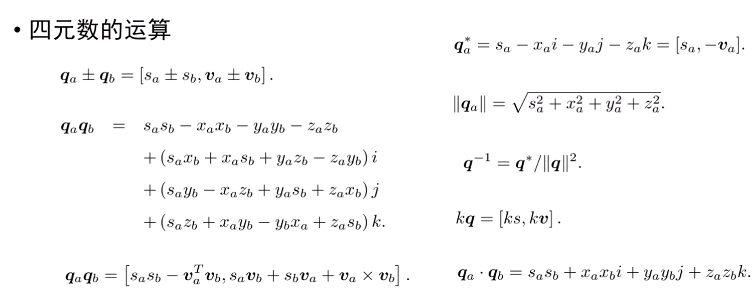
四元数也能定义很多运算:
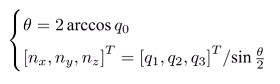
四元数转换成旋转向量:
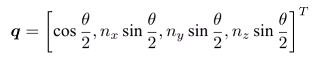
旋转向量转换成四元数:
用四元数表示旋转:

Slam笔记I的更多相关文章
- 非滤波单目视觉slam笔记1
非滤波单目视觉slam 主要分为以下8部分 数据类型 数据关联 初始化 位姿估计 地图维护 地图生成 失效恢复 回环检测 数据类型 直接法(稠密,半稠密) 基本原理是亮度一致性约束,\(J(x,y) ...
- SLAM笔记
1.matrix.preTranslate()和matrix.postTranslate()的区别 matrix.preTranslate(matrix_1); matrix.postTranslat ...
- ROS_RGB-D SLAM学习笔记--室内环境测试
ROS_RGB-D SLAM学习笔记 RTAB-Map's ros-pkg. RTAB-Map is a RGB-D SLAM approach with real-time constraints. ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) indigo rplidar rviz slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- SLAM学习笔记
ORB_SLAM2源码: 获得旋转矩阵,来自这里:http://www.cnblogs.com/shang-slam/p/6406584.html 关于Covisibility图来自:http://b ...
- ROS进阶学习笔记(11)- Turtlebot Navigation and SLAM - ROSMapModify - ROS地图修改
ROS进阶学习笔记(11)- Turtlebot Navigation and SLAM - 2 - MapModify地图修改 We can use gmapping model to genera ...
- 三维重建7:Visual SLAM算法笔记
VSLAM研究了几十年,新的东西不是很多,三维重建的VSLAM方法可以用一篇文章总结一下. 此文是一个好的视觉SLAM综述,对视觉SLAM总结比较全面,是SLAM那本书的很好的补充.介绍了基于滤波器的 ...
- SLAM学习笔记(2)SLAM算法
SLAM算法分为三类:Kalman滤波.概率滤波.图优化 Kalman滤波方法包括EKF.EIF:概率滤波包括RBPF,FastSLAM是RBPF滤波器最为成功的实例, 也是应用最为广泛的SLAM方法 ...
随机推荐
- 谈谈Vue的递归组件
2月最后一天,而且还四年一遇,然而本月居然一篇博客没写,有点说不过去.所以,今天就来谈谈Vue的递归组件.我们先来看一个例子: See the Pen 递归组件 by imgss (@imgss) o ...
- 【原创】从零开始搭建Electron+Vue+Webpack项目框架(五)预加载和Electron自动更新
导航: (一)Electron跑起来(二)从零搭建Vue全家桶+webpack项目框架(三)Electron+Vue+Webpack,联合调试整个项目(四)Electron配置润色(五)预加载及自动更 ...
- C++走向远洋——62(项目二1、类模板)
*/ * Copyright (c) 2016,烟台大学计算机与控制工程学院 * All rights reserved. * 文件名:text.cpp * 作者:常轩 * 微信公众号:Worldhe ...
- FormsAuthenticationTicket身份验证通过后无法登陆---可能存在的问题
这是我自己遇到过的,FormsAuthenticationTicket身份验证通过后还是存在无法登录的问题,调试了很长时间还是没有发现问题,最后突然想到是否是因为cookie长度限制,导致不能将信息存 ...
- python中excel数据分组处理
1.场景描述 因文本相似性热度统计(python版)需求中要根据故障类型进行分组统计,需要对excel进行分组后再分词统计,简单记录下,有需要的朋友可以直接拿走,不客气! 2.解决方案 采用panda ...
- 解决oninput事件在中文输入法下会取得拼音的值的问题
在做搜索等功能时,很多时候我们需要实时获取用户输入的值,而常常会得到类似 w'm 这样的拼音.为了解决这个问题,我在网上搜索了下相关问题,发现了两个陌生的事件:compositionstart 和 c ...
- 2020年,如何成为一名 iOS 开发高手!
2020年对应程序员来说,是一个多灾的年份,很多公司都进行了不同比例的优化和裁员.等疫情得到控制后,将会是找工作的高峰期,从去年的面试经历来看,现在只会单纯写业务代码的人找工作特别难,很多大厂的面试官 ...
- [红日安全]Web安全Day9 - 文件下载漏洞实战攻防
本文由红日安全成员: Once 编写,如有不当,还望斧正. 大家好,我们是红日安全-Web安全攻防小组.此项目是关于Web安全的系列文章分享,还包含一个HTB靶场供大家练习,我们给这个项目起了一个名字 ...
- python全局变量语句global
在python中使用函数体外的变量,可以使用global语句 变量可以是局部域或者全局域.定义在函数内的变量有局部作用域,在一个模块中最高级别的变量有全局作用域. 在编译器理论里著名的“龙书”中,阿霍 ...
- Await/Async
Async其实就是Generator函数的语法糖. 啥是语法糖?就是一种更容易让人理解,代码可读性更高的另外一种语法. const asyncRead = async function(){ cons ...