移动物体监控系统-sprint2摄像头子系统开发
一、摄像头使能驱动
1.1 摄像头软件系统构架
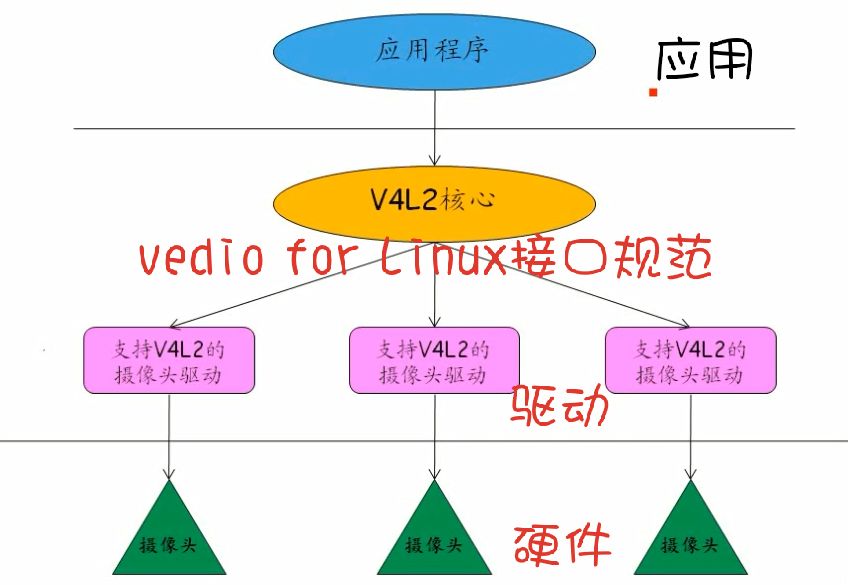
摄像头采集系统按照上图,硬件(摄像头)->摄像头驱动 ->V4L2接口规范 ->图像采集(应用)。V4L2将不同类型的摄像头设备按照统一的接口规范进行图像采集!!!
1.2 摄像头驱动的使能配置
(1)在linux-smart210目录下执行 "make menuconfig ARCH+arm"
(2)依次选择如下配置选项
Device Drivers --->
Multimedia support --->
[*]video for linux --->
[*]video capture adapters --->
[*]V2L usb devices ---> (支持V4L2接口)
<*>GSPCA based webcams --->(万能摄像头驱动)
<*>ZC3XX usb camers Drivers (具体usb摄像头对应的驱动程序)
(3)编译新内核(make uImage ARCH=arm CROSS _COMPILE=arm=linux),内核下载至开发板,摄像头开发环境搭建完成。
(4)摄像头测试程序 camers.c
编译" arm-linux-gcc camera.c -o camera ",将生成的应用程序拷贝到开发板,插入USB摄像头至开发板显示驱动连接信息,执行./camera,即可捕获采集的图像。
二、V4L2编程接口基础设计
part1:V4L2设计构架图
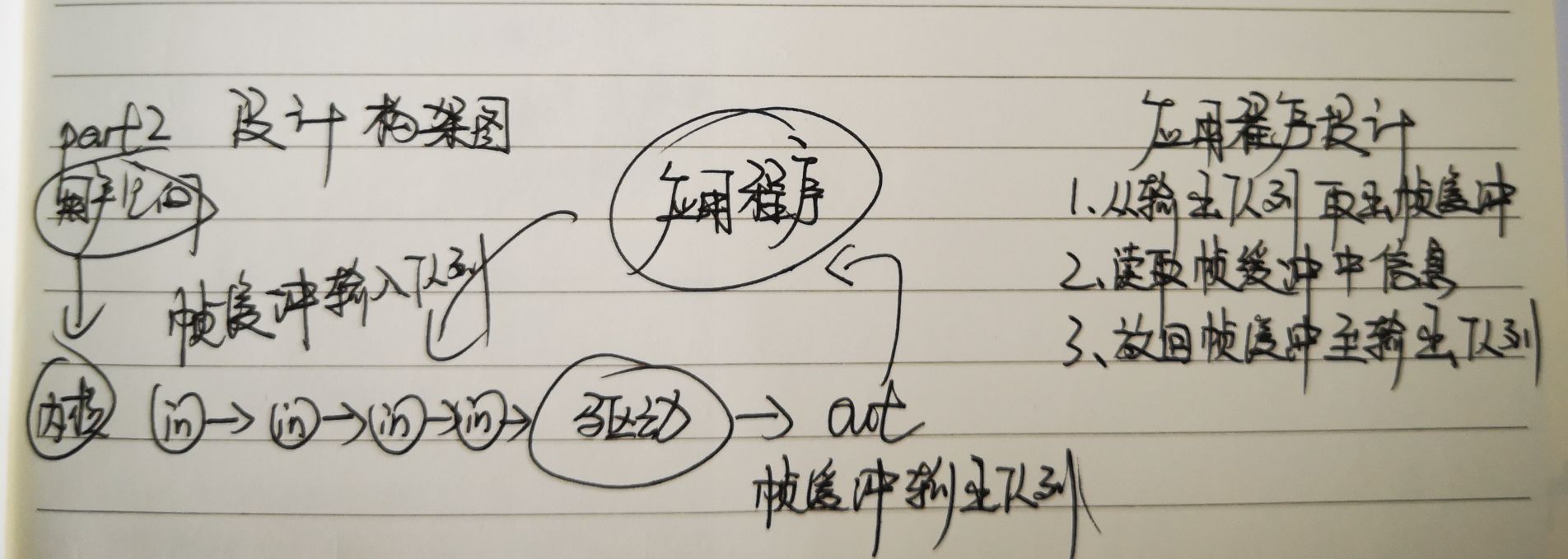
由上图,内核空间中帧缓冲中存储中着摄像头驱动采集的图像信息,用户空间的应用程序需要获取采集到的图像,则需要对帧缓冲进行一下处理:
取出帧缓冲(出队列) ->读取帧缓冲中的数据 -> 放回帧缓冲(入队)
part2:V4L2摄像头编程模型
1、打开摄像头设备文件 ("/dev/video0");
2、获取驱动信息 (ioctl_fd,VIDIOC_QIERYCAP,&cap)
3、设置图像格式 (VIDIOC_S_FMT)
4、申请帧缓冲 (VIDIOC_REQBUFS)
5、获取帧缓冲长度信息 (VIDIOC_QUERYBUF)
6、使用mmap把内核空间的帧缓冲映射到用户空间
7、帧缓冲入队列 (VIDIOC_QBUF)
8、开始采集图像 (VIDIOC_STREAMON)
9、取出帧缓冲(出队)(VIDIOC_DQBUF)
10、访问帧缓冲 (write/read)
11、帧缓冲重新入队 (VIDIOC_QBUF)
part3:V4L2编程
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <assert.h>
#include <getopt.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#include <malloc.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/time.h>
#include <sys/mman.h>
#include <sys/ioctl.h> #include <asm/types.h>
#include <linux/videodev2.h> struct buffer {
void * start;
size_t length;
}; struct buffer *buffers;
unsigned long n_buffers;
unsigned long file_length; int file_fd;
char *dev_name = "/dev/video3";
int fd; static int read_frame (void)
{
struct v4l2_buffer buf; /*帧出列*/
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //V4L2_BUF_TYPE_VIDEO_CAPTURE:1
buf.memory = V4L2_MEMORY_MMAP;
ioctl (fd, VIDIOC_DQBUF, &buf); write(file_fd,buffers[buf.index].start,buffers[buf.index].length); /*buf入列*/
ioctl(fd, VIDIOC_QBUF, &buf); return ;
} int main (int argc,char ** argv)
{
struct v4l2_capability cap;
struct v4l2_format fmt;
struct v4l2_requestbuffers req;
struct v4l2_buffer buf;
unsigned int i;
enum v4l2_buf_type type; file_fd = open("test.jpg", O_RDWR | O_CREAT, );
//1.打开摄像头设备文件
fd = open (dev_name, O_RDWR | O_NONBLOCK, ); /*2.获取驱动信息*/
ioctl (fd, VIDIOC_QUERYCAP, &cap);
printf("Driver Name:%s\n Card Name:%s\n Bus info:%s\n\n",cap.driver,cap.card,cap.bus_info); /*3.设置图像格式*/
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = ;
fmt.fmt.pix.height = ;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG; ioctl (fd, VIDIOC_S_FMT, &fmt) ; /*4.申请图像缓冲区*/
req.count = ;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
ioctl (fd, VIDIOC_REQBUFS, &req); buffers = calloc (req.count, sizeof (*buffers)); for (n_buffers = ; n_buffers < req.count; ++n_buffers)
{
/*4.1获取图像缓冲区的信息*/
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers; ioctl (fd, VIDIOC_QUERYBUF, &buf); buffers[n_buffers].length = buf.length; // 4.2把内核空间中的图像缓冲区映射到用户空间
buffers[n_buffers].start = mmap (NULL , //通过mmap建立映射关系
buf.length,
PROT_READ | PROT_WRITE ,
MAP_SHARED ,
fd,
buf.m.offset);
} /*4.3图像缓冲入队*/ for (i = ; i < n_buffers; ++i)
{
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
ioctl (fd, VIDIOC_QBUF, &buf); } //4.4开始捕捉图像数据
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON, &type); fd_set fds; FD_ZERO (&fds);
FD_SET (fd, &fds); select(fd + , &fds, NULL, NULL, NULL); /*4.5读取一幅图像*/
read_frame(); for (i = ; i < n_buffers; ++i)
munmap (buffers[i].start, buffers[i].length); close (fd);
close (file_fd);
printf("Camera Done.\n"); return ;
}
移动物体监控系统-sprint2摄像头子系统开发的更多相关文章
- 阶段2-新手上路\项目-移动物体监控系统\Sprint2-摄像头子系统开发\第2节-V4L2图像编程接口深度学习
参考资料: http://www.cnblogs.com/emouse/archive/2013/03/04/2943243.htmlhttp://blog.csdn.net/eastmoon5021 ...
- 移动物体监控系统-sprint3移动监控主系统设计与开发
一.移动监控的原理 通过获取摄像头图像,比较前后每一帧的图像数据,从而实现移动物体监控.所有移动监控原理都是这样,只是图像帧的对比的算法不一样. 二.移动物体监控系统的实现 选择开源的移动监控软件mo ...
- 阶段2-新手上路\项目-移动物体监控系统\Sprint3-移动监控主系统设计与开发
移动图像监控系统 去找一些相关开源程序进行移植:百度搜索-linux 移动监控 motion是一套免费开源的移动图像监测程序 前面我们已经使用了很多开源软件,他们的使用方法都是大同小异的 1).先在当 ...
- 阶段2-新手上路\项目-移动物体监控系统\Sprint1-声音报警子系统开发\第1节-Sprint Backlog规划
根据之前的sprint1-声音报警子系统是相对比较大的一个需求,需要把它进一步细化,然后指定sprint Backlog product Backlog是整个产品的功能列表! sprint Backl ...
- 阶段2-新手上路\项目-移动物体监控系统\Sprint4-嵌入式web服务器开发\第3课-CGI程序开发
实现CGI程序显示一幅图片最核心的功能 把上一节课编写好的led.c程序拷贝过来,并重新命名为image.c 把led的某些部分删除,后如下 那么如何显示一幅图片呢,百度(搜索在html里面去插入图片 ...
- 基于视频压缩的实时监控系统-sprint2采集端图像采集子系统设计
(1).初始化:a.初始化摄像头:b.注册事件到epoll (2).开始采集--->触发事件处理系统 (3).保存图像(方便测试) a.初始化摄像头 //初始化摄像头 1.获取驱动信息 2.设置 ...
- 移动物体监控系统-sprint4嵌入式web服务器开发
一.BOA嵌入式服务器的移植 step1:下载BOA服务器并解压,进入boa下面的src目录,执行./configure生成必须的配置文件以及Makefile step2:修改Makefile文件 c ...
- 移动物体监控系统-sprint1声音报警子系统
一.声卡驱动开发 1.1 声卡驱动架构 ——OSS开放式音频系统,声卡驱动中传统的OSS构架在02年被收购后即不开源,并且OSS的混音效果不好,因为产生了ALSA ——AlSA Linux系统高级音频 ...
- 第5季-小试牛刀-项目开发\阶段2-新手上路\项目-移动物体监控系统\Sprint0-产品设计与规划
lesson1---产品功能展示 先完成准备阶段,准备阶段要做的事情: a.项目经理选择团队, b.根据项目用户需求以及同类型的实物,制定产品功能列表 c.根据功能的难易程度,制定迭代周期以及在每周期 ...
随机推荐
- 一道题理解setTimeout,Promise,async/await以及宏任务与微任务
今天看到这样一道面试题: //请写出输出内容 async function async1() { console.log('async1 start'); await async2(); consol ...
- 一张PDF了解JDK10 GC调优秘籍-附PDF下载
目录 简介 Java参数类型 Large Pages JIT调优 总结 简介 今天我们讲讲JDK10中的JVM GC调优参数,JDK10中JVM的参数总共有1957个,其中正式的参数有658个. 其实 ...
- 微信小程序 + wepy快速开发
wepy官网:https://tencent.github.io/wepy/document.html,想要了解全面最好去官网,以下只是指出项目里常用地方. 1.页面跳转 (1)//有返回跳转wepy ...
- 计算机网络学习socket--day3
1.REUSEADDR(地址重复利用) 1.REUSEADDR解决服务器关闭后重新绑定地址,在day3中知道服务器端必须绑定地址 2.服务器端尽可能使用REUSEADDR 3.在绑定之前尽可能调用se ...
- vue : 无法加载文件 C:\Users\ui61895076\AppData\Roaming\npm\vue.ps1,因为在此系统上禁止运行脚本。有关详细信息,请参阅 https:/go.microsoft.com/fwlink/?LinkID=135170 中的 about_Execution_Policies。
说白了就是这个编辑器不能用罢了 执行以下代码 1.鼠标右击以管理员身份运行vscode; 2. 执行:get-ExecutionPolicy,显示Restricted,表示状态是禁止的; 3. 执行: ...
- OSCP Learning Notes - Overview
Prerequisites: Knowledge of scripting languages(Bash/Pyhon) Understanding of basic networking concep ...
- Ethical Hacking - GAINING ACCESS(19)
Client-Side Attacks - Social Engineering Tool: The FAT RAT Just like Veil, it generates Undetectable ...
- win7下建立docker共享文件夹
前言 建立本机(win7)和VirtualBox中docker虚拟机的共享文件夹,注:下面的命令都是以root身份运行的,使用sudo -i切换到root身份,如无法切换,请自行在命令前加上sudo命 ...
- wordpress学习笔记
版本:4.9.8 我用wordpress的初衷是借用它的后台系统,前端用自己的网页显示存在wordpress数据库里的文章. wordpress本质上是个框架,技术栈:web-php-mysql. 初 ...
- Shell基本语法---if语句
if语句 格式 #单分支 if [ 条件判断 ]; then 执行动作 fi if [ 条件判断 ]; then 执行动作 else 执行动作 fi #多分支 if [条件判断]; then 执行动作 ...