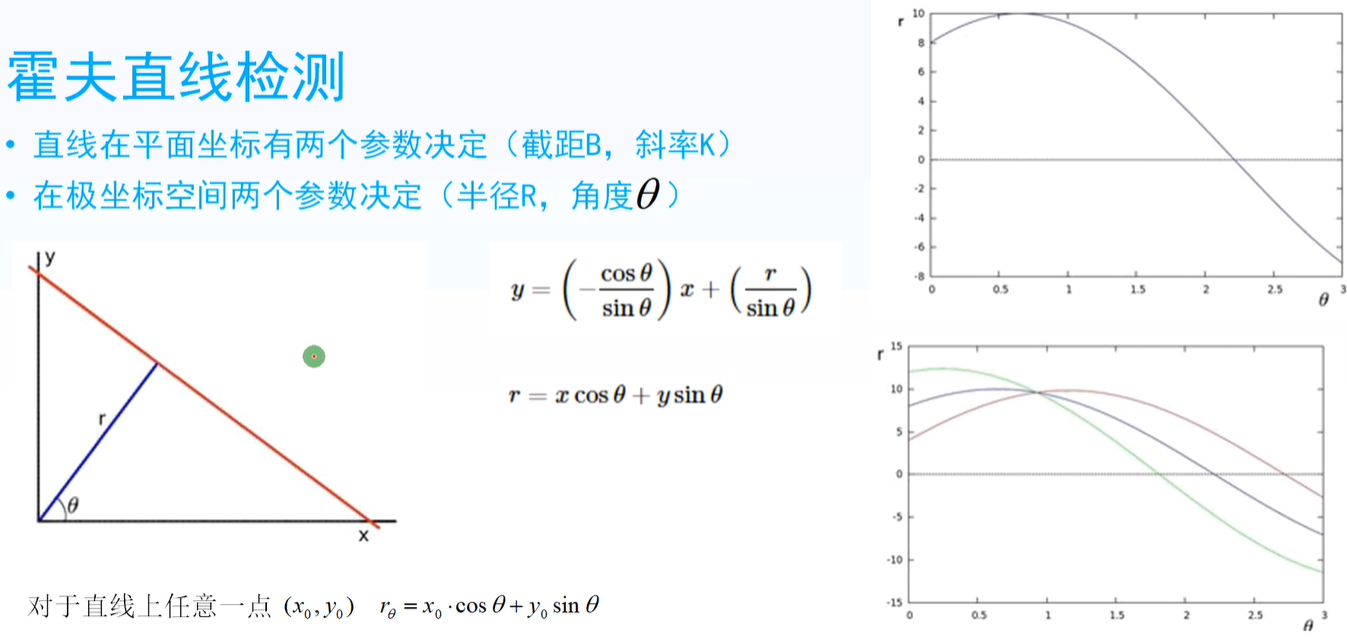
opencv:霍夫直线检测

#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
void hough_linesp_demo();
int main(int argc, char** argv)
{
Mat src = imread("f:/images/qq/tline.png");
//Mat src = imread("f:/images/qq/yezi.png");
if (src.empty())
{
printf("Could not find the image!\n");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
// 做一个高斯模糊,消除一些细微的东西
//GaussianBlur(src, src, Size(3, 3), 0);
Mat gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
imshow("gray", gray);
// 二值化
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary", binary);
// 霍夫直线检测
vector<Vec3f> lines;
HoughLines(binary, lines, 1, CV_PI / 180.0, 100, 0, 0);
// 绘制直线
Point pt1, pt2;
for (size_t i = 0; i < lines.size(); i++) {
float rho = lines[i][0]; // 距离
float theta = lines[i][1]; // 角度
float acc = lines[i][2]; // 累加值
printf("rho: %.2f, thrta: %.2f, acc: %.2f\n", rho, theta, acc);
double a = cos(theta);
double b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
int angle = round((theta / CV_PI) * 180);
if (rho > 0) { //右倾
line(src, pt1, pt2, Scalar(0, 0, 255), 2, 8, 0);
if (angle == 90) { // 水平线
line(src, pt1, pt2, Scalar(0, 255, 255), 2, 8, 0);
}
if (angle < 1) { // 近似垂直线
line(src, pt1, pt2, Scalar(255, 255, 0), 2, 8, 0);
}
}
else { // 左倾
line(src, pt1, pt2, Scalar(255, 0, 0), 2, 8, 0);
}
}
imshow("hough line detection", src);
hough_linesp_demo();
waitKey(0);
destroyAllWindows();
return 0;
}
void hough_linesp_demo() {
Mat src = imread("f:/images/qq/tline.png");
Mat gray, binary;
Canny(src, binary, 80, 160, 3, false);
imshow("canny binary", binary);
vector<Vec4i> lines;
HoughLinesP(binary, lines, 1, CV_PI / 180, 80, 30, 10);
Mat result = Mat::zeros(src.size(), src.type());
for (int i = 0; i < lines.size(); i++) {
line(result, Point(lines[i][0], lines[i][1]), Point(lines[i][2], lines[i][3]), Scalar(0, 0, 255), 2, 8, 0);
}
imshow("hough linesp demo", result);
}
opencv:霍夫直线检测的更多相关文章
- Android开发中的OpenCV霍夫直线检测(Imgproc.HoughLines()&Imgproc.HoughLinesP())
本文为作者原创,转载请注明出处(http://www.cnblogs.com/mar-q/)by 负赑屃 //2017-04-21更新: 很多网友希望能得到源码,由于在公司做的,所以不太方便传出来 ...
- 霍夫直线检测 opencv
本次实验是检测图像中的直线,用到了HoughLines()和HoughLinesP()函数,其中HoughLinesP()称为累计概率霍夫变换,实验结果显示累计概率霍夫变换要比标准霍夫变换的效果好.具 ...
- OpenCV-Python 霍夫直线检测-HoughLinesP函数参数
cv2.HoughLines()函数是在二值图像中查找直线,cv2.HoughLinesP()函数可以查找直线段. cv2.HoughLinesP()函数原型: HoughLinesP(image, ...
- opencv python:直线检测 与 圆检测
霍夫直线变换介绍 霍夫圆检测 现实中: example import cv2 as cv import numpy as np # 关于霍夫变换的相关知识可以看看这个博客:https://blog.c ...
- OpenCV——霍夫变换(直线检测、圆检测)
x #include <opencv2/opencv.hpp> #include <iostream> #include <math.h> using namesp ...
- opencv::霍夫圆变换
霍夫圆检测原理 从平面坐标到极坐标转换三个参数 假设平面坐标的任意一个圆上的点,转换到极坐标中: 处有最大值,霍夫变换正是利用这个原理实现圆的检测. cv::HoughCircles 因为霍夫圆检测对 ...
- 霍夫圆检测 opencv
进行霍夫圆变换中有一个API:HoughCircles(). 第五个参数为double类型的minDist(),为霍夫变换检测到的圆的圆心之间的最小距离,即让算法能明显区分的两个不同圆之间的最小距离. ...
- opencv:霍夫圆检测
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- OpenCV 霍夫线变换
#include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgproc.hpp" #i ...
随机推荐
- java课堂测试
package 作业2; //信1805-1 杨一帆 20183608 public class ScoreInformation1 { private String stunumber; pr ...
- URLSearchParams/FormData
一.URLSearchParams()(很好用,但有一定兼容问题,未来版本的浏览器中该功能的语法和行为可能随对应的标准文档而改变.) URLSearchParams 接口定义了一些实用的方法来处理 U ...
- VM中Linux网络设置(固定ip、连接外网开发环境)
在开发过程中,我们经常需要在linux中进行操作.毕竟服务器的系统大多数都是Linux,所以在dev环境需要配置好一台Linux系统配合开发. 在VMWare Workstation Pro中 ...
- HDU-2036 改革春风吹满地 (数学)
Problem Description "改革春风吹满地,不会AC没关系;实在不行回老家,还有一亩三分地.谢谢!(乐队奏乐)" 话说部分学生心态极好,每天就知道游戏,这次考试如此简 ...
- MAC MAMP集成环境安装 PHP 扩展
MAC MAMP集成环境安装 PHP扩展 开发环境中,对于需要维护很多 WEB 站点,以及可能会使用到很多不同的 PHP 版本,集成环境比较好用,在MAC 上 MAMP 集成环境是比较好用的,但是在安 ...
- 【数据结构】【C++】堆栈的实现与应用
堆栈(Stack) 参考浙大版<数据结构(第2版)> 堆栈可以认为是具有一定约束的线性表,插入和删除的操作都在栈顶的位置,先进入的元素将在后进入的元素之后取出,与生活中的桶类似,故又称为后 ...
- Python入门4 —— 输入与输出
一:输入(Input) 1.python3中的input(输入) inp_username=input("请输入您的密码:") # "18" print(inp ...
- spring boot 运行错误: 找不到或无法加载主类
在项目根目录运行 mvn clean install 进行重新编译 不行的话就删了原有的启动配置,重新配置启动.
- SpringBoot整合WEB开发--(三)文件上传
文件上传: Java中文件上传一共涉及到两个组件,CommonsMultipartResolver和StandardServletMultipartResolver,其中CommonsMultipar ...
- 虚拟机linux系统网络连接配置问题总结
1.虚拟机与CentOS的安装与配置参考本人博客:https://www.cnblogs.com/ClikeL/p/11743520.html 2.测试网络连接 ping www.baidu.com ...