opencv-图像类型、深度、通道
转自:图像类型 与 opencv中图像基础(大小,深度,通道)
一、图像基本类型
在计算机中,按照颜色和灰度的多少可以将图像分为四种基本类型。
1. 二值图像
2. 灰度图像
3. 索引图像
4. 真彩色RGB图像
1. 二值图像
一幅二值图像的二维矩阵仅由0、1两个值构成,“0”代表黑色,“1”代白色。由于每一像素(矩阵中每一元素)取值仅有0、1两种可能,所以计算机中二值图像的数据类型通常为1个二进制位。二值图像通常用于文字、线条图的扫描识别(OCR)和掩膜图像的存储。
2. 灰度图像
灰度图像矩阵元素的取值范围通常为[0,255]。因此其数据类型一般为8位无符号整数的(int8),这就是人们经常提到的256灰度图像。“0”表示纯黑色,“255”表示纯白色,中间的数字从小到大表示由黑到白的过渡色。在某些软件中,灰度图像也可以用双精度数据类型(double)表示,像素的值域为[0,1],0代表黑色,1代表白色,0到1之间的小数表示不同的灰度等级。二值图像可以看成是灰度图像的一个特例。
3. 索引图像
索引图像的文件结构比较复杂,除了存放图像的二维矩阵外,还包括一个称之为颜色索引矩阵MAP的二维数组。MAP的大小由存放图像的矩阵元素值域决定,如矩阵元素值域为[0,255],则MAP矩阵的大小为256Ⅹ3,用MAP=[RGB]表示。MAP中每一行的三个元素分别指定该行对应颜色的红、绿、蓝单色值,MAP中每一行对应图像矩阵像素的一个灰度值,如某一像素的灰度值为64,则该像素就与MAP中的第64行建立了映射关系,该像素在屏幕上的实际颜色由第64行的[RGB]组合决定。也就是说,图像在屏幕上显示时,每一像素的颜色由存放在矩阵中该像素的灰度值作为索引通过检索颜色索引矩阵MAP得到。索引图像的数据类型一般为8位无符号整形(int8),相应索引矩阵MAP的大小为256Ⅹ3,因此一般索引图像只能同时显示256种颜色,但通过改变索引矩阵,颜色的类型可以调整。索引图像的数据类型也可采用双精度浮点型(double)。索引图像一般用于存放色彩要求比较简单的图像,如Windows中色彩构成比较简单的壁纸多采用索引图像存放,如果图像的色彩比较复杂,就要用到RGB真彩色图像。
4. 真彩色RGB图像
RGB图像与索引图像一样都可以用来表示彩色图像。与索引图像一样,它分别用红(R)、绿(G)、蓝(B)三原色的组合来表示每个像素的颜色。但与索引图像不同的是,RGB图像每一个像素的颜色值(由RGB三原色表示)直接存放在图像矩阵中,由于每一像素的颜色需由R、G、B三个分量来表示,M、N分别表示图像的行列数,三个M x N的二维矩阵分别表示各个像素的R、G、B三个颜色分量。RGB图像的数据类型一般为8位无符号整形,通常用于表示和存放真彩色图像,当然也可以存放灰度图像。
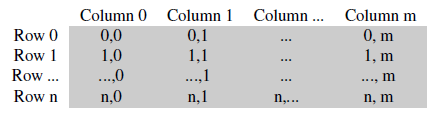
灰度图像按行列存储,每列仅含一个通道
RGB图像存储方式如下,每列含有三个通道(注意:通道的顺序是 BGR 而不是 RGB)

通常情况,内存足够大的话,图像的每一行是连续存放的,也就是在内存上图像的所有数据存放成一行,这中情况在访问时可以提供很大方便。
可以用 isContinuous()函数来判断图像数组是否为连续的。
二、图像基础(大小,深度,通道)
创建图像包含三个元素:
图像的大小; 图像的深度; 图像的通道;
1、图像的位深度及其取值范围: src.depth()
Mat类型:
– CV_<bit_depth>(S|U|F)C<number_of_channels>
S = 符号整型 U = 无符号整型 F = 浮点型
E.g.:
CV_8UC1 是指一个8位无符号整型单通道矩阵,
CV_32FC2是指一个32位浮点型双通道矩阵。
CV_8UC1 CV_8SC1 CV_16U C1 CV_16SC1
CV_8UC2 CV_8SC2 CV_16UC2 CV_16SC2
CV_8UC3 CV_8SC3 CV_16UC3 CV_16SC3
CV_8UC4 CV_8SC4 CV_16UC4 CV_16SC4
CV_32SC1 CV_32FC1 CV_64FC1
CV_32SC2 CV_32FC2 CV_64FC2
CV_32SC3 CV_32FC3 CV_64FC3
CV_32SC4 CV_32FC4 CV_64FC4
depth 图像元素的位深度,可以是下面的其中之一:
IPLimage类型:
位深度 取值范围
IPL_DEPTH_8U - 无符号8位整型 0--255
IPL_DEPTH_8S - 有符号8位整型 -128--127
IPL_DEPTH_16U - 无符号16位整型 0--65535
IPL_DEPTH_16S - 有符号16位整型 -32768--32767
IPL_DEPTH_32S - 有符号32位整型 0--65535
IPL_DEPTH_32F - 单精度浮点数 0.0--1.0
IPL_DEPTH_64F - 双精度浮点数 0.0--1.0
位深度转换原理:
如上,给出图像的位深度及其取值范围后,我们不难理解,要转换位深度本质上就是对原深度下的数据做线性变换,使原位深度下的最小值和最大值分别对应转换后位深度下的最小值和最大值。实现上述线性变换,我们可以用opencv库函数cvConvertScale。
cvConvertScale函数简介
函数说明: cvConvertScale( const CvArr* src, CvArr* dst, double scale CV_DEFAULT(1), double shift CV_DEFAULT(0) );
功能:使用线性变换转换数组
参数说明: src 输入数组,dst 输出数组,scale 比例因子,shift 偏移量。
对应的线性变换公式: dst(I)=src(I)*scale + (shift,shift,...)。
2、图像的大小:Size()
size包含两个参数:就是图像的宽度和高。 取图像的大小:src.size()
Size (宽,高)
3、图像的通道
Mat类型: CV_<bit_depth>(S|U|F)C<number_of_channels> 中C就代表通道,后面的数字代表通道数。
1、比较通俗易懂的解释是:灰度图的通道数为1,彩色图的通道为3。基本上,描述一个像素点,如果是灰度,那么只需要一个数值来描述它,就是单通道。如果一个像素点,有RGB三种颜色来描述它,就是三通道。
2、4通道通常为RGBA,在某些处理中可能会用到。2通道图像不常见,通常在程序处理中会用到,如傅里叶变换,可能会用到,一个通道为实数,一个通道为虚数,主要是编程方便。还有一种情况就是16位图像,本来是3通道,但是为了减少数据量,压缩为16位,刚好两个通道,常见格式有RGB555或RGB565,也就是说R占5位,G占5或6位,B占5位,也有RGBA5551格式。古老的格式,不用也罢。
3、主要是有些摄像头常采用一些比较“古怪”的格式,没办法。补充一种情况,目前常见的一些摄像头喜欢采用YUV2等格式,格式如下YUYV,在处理的时候可以用4通道或者2通道来处理。如原格式为:Y1UY2V,插值成为Y1UV,Y2UV 就成两个彩色点了。YCrCb也有类似压缩情况。
描述一个像素点,如果是灰度,那么只需要一个数值来描述它,就是单通道。如果一个像素点,有RGB三种颜色来描述它,就是三通道。
windows的bmp有时候是一个四通道图像,R、G、B加上一个A通道,表示透明度。
opencv-图像类型、深度、通道的更多相关文章
- OpenCV——图像的深度与通道数讲解
矩阵数据类型: – CV_(S|U|F)C S = 符号整型 U = 无符号整型 F = 浮点型 E.g.: CV_8UC1 是指一个8位无符号整型单通道矩阵, CV_32FC2是指一个32位浮点型双 ...
- 使用opencv为没有透明通道的图像加入透明通道
在图像处理中,我们经常需要处理带透明通道的图片,比如为图片或视频添加水印,为图片或视频添加字幕.贴图等.然而,我们的素材图片未必总是带有透明通道.比如,素材的背景本该透明的地方,却是黑色和白色.有时, ...
- <学习opencv>图像和大型阵列类型
OPenCV /*=========================================================================*/ // 图像和大型阵列类型 /* ...
- python有关于图像的深度和通道
目录: (一)图像的深度和图像的通道 (1)图像的深度 (2)图像的通道 (二)自定义一张多通道的图片 (1)zeros 函数 (2)ones 函数 (三)自定义一张单通道的图片 (四)像素操作 ...
- opencv——图像直方图与反向投影
引言 在图像处理中,对于直方图这个概念,肯定不会陌生.但是其原理真的可以信手拈来吗? 本文篇幅有点长,在此列个目录,大家可以跳着看: 分析图像直方图的概念,以及opencv函数calcHist()对于 ...
- <学习opencv>图像、视频和数据文件
/*=========================================================================*/ // openCV中的函数 /*====== ...
- OpenCV图像的缩放
函数介绍: 1.cvResize 改变图像大小 void cvResize(const CvArr *src, CvArr *dst, int interpolation) 函数说 ...
- opencv——图像遍历以及像素操作
摘要 我们在图像处理时经常会用到遍历图像像素点的方式,在OpenCV中一般有四种图像遍历的方式,在这里我们通过像素变换的点操作来实现对图像亮度和对比度的调整. 补充: 图像变换可以看成 像素变换--点 ...
- OpenCV图像金字塔:高斯金字塔、拉普拉斯金字塔与图片尺寸缩放
这篇已经写得很好,真心给作者点个赞.题目都是直接转过来的,直接去看吧. Reference Link : http://blog.csdn.net/poem_qianmo/article/detail ...
- 【OpenCV新手教程之十三】OpenCV图像金字塔:高斯金字塔、拉普拉斯金字塔与图片尺寸缩放
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/26157633 作者:毛星云(浅墨) ...
随机推荐
- Java多线程(五)之BlockingQueue深入分析
一.概述: BlockingQueue作为线程容器,可以为线程同步提供有力的保障. 二.BlockingQueue定义的常用方法 1.BlockingQueue定义的常用方法如下: 1)add( ...
- Soci介绍
soci是一个用C++封装的数据库访问库,目前通过 “前端(应用程序)/核心/后端(数据库适配)”模式支持firebird,mysql,sqlite3,oracle,postgresql,odbc多种 ...
- windows2012 日志查看过程
Windows2012界面修改好造成有些人不知道在哪里查找windows 日志 我这边截图描述一下 1. 2.输入 命令 eventvwr.msc 3.弹出 windows 事件查看器 4.若需要 ...
- 小程序template怎样渲染页面的
template模板渲染demo wxml页面 <view class="btmcon"> <text class="btmtitle"> ...
- latex 引用文献 bib
study from : https://jingyan.baidu.com/article/925f8cb8bce1f0c0dce0564f.html 寻找文献 谷歌学术 from: https:/ ...
- ForkJoin学习笔记
1.Fork/Join框架:(分治算法思想) 在必要的情况下,将一个大任务,进行拆分(fork) 成若干个子任务(拆到不能再拆,这里就是指我们制定的拆分的临界值),再将一个个小任务的结果进行join汇 ...
- Flink on YARN(下):常见问题与排查思路
Flink 支持 Standalone 独立部署和 YARN.Kubernetes.Mesos 等集群部署模式,其中 YARN 集群部署模式在国内的应用越来越广泛.Flink 社区将推出 Flink ...
- thinkphp 变量输出
在模板中输出变量的方法很简单,例如,在控制器中我们给模板变量赋值: 大理石平台支架 $name = 'ThinkPHP'; $this->assign('name',$name); $this- ...
- 利用VS2015自带的报表制作报表
我用的是VSEnterprise2015 注意:如果要用VS自带的报表,就需要在安装Microsoft SQL Server Data Tools 下面讲讲具体步骤: 1.添加winform界面 2. ...
- [POI2013]MOR-Tales of seafaring
题目 思博题,发现一旦路径太长我们可以来回走最后一条边,但是这样并不能改变路径长度的奇偶性 所以求一下所有点之间奇最短路和偶最短路就好了,直接暴力\(BFS\)即可 有一个烦人的特判 代码 #incl ...