新的开始——LED灯汇编机器码的点亮方式
在几个月前看2440视频的时候,发现太多知识欠缺,购买开发板期间补习makefile,linux,arm汇编和arm构架之后,现在重新开始学习。
先看板子LED硬件连接图:


可以看到LED 1,2,4连接GPF4,5,6。故,查看芯片手册GPF IO口:
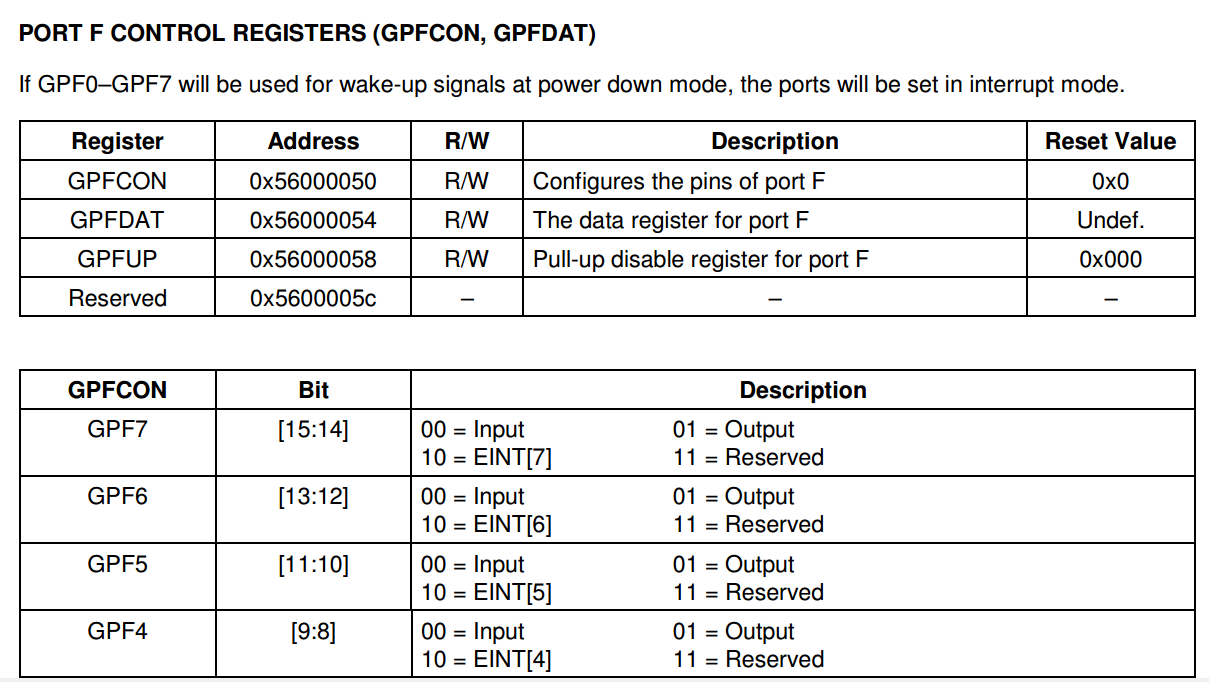
有寄存器地址,有对应位的功能,剩下的就是我们的编程了。
写在前面:基本汇编拾遗
Load/Store 内存访问指令:
LDR:字 数据读取指令
LDRB:字节读取指令
LDR R0,[R1];把内存单元R1中的数据读取到R0寄存器中
。。。LDR,STR还有很多后缀的指令不详举例了,以后用到再说明
STR:字数据写入指令
STRB:字节数据写入指令
STR R0,[R1,#0X100];把R0中的数据保存到内存单元(R1+0X100)中
B:跳转
MOV:移动 MOV R1,R0;把R0的值赋值给R1
伪指令:LDR(上面一个LDR的用法是汇编指令,但是LDR也可以是伪指令)
LDR R0,=0X1234;表示把0x1234赋值给R0,你可能会想,MOV不就可以达到效果了吗?
但是,MOV只能处理立即数,当我们不能保证一个数是否是立即数的时候,请使用LDR伪指令。
关于什么样的数才能算是立即数,可以参考ARM体系结构 P24对立即数的叙述。
简单介绍一下:
每个立即数由一个8位的常数循环右移偶数位得到,循环右移的偶数由一个4位二进制数的两倍表示记作rotate_imm,8位常数记作immed_8,立即数记作<immediate>;
<immediate>=immed_8循环右移(2*rotate_imm)
现在开始编写汇编指令,linux与windows开发最大的不同就是linux一切靠自己,不用IDE。
/*
* 点亮LED1: gpf4
*/ .text/*文本段*/
.global _start/*全局标号_start*/ _start: /* 配置GPF4为输出引脚
* 把0x100写到地址0x56000050
*/
ldr r1, =0x56000050/*为什么不使用mov,因为立即数不是一眼就能看出来的*/
ldr r0, =0x100 /* mov r0, #0x100 */
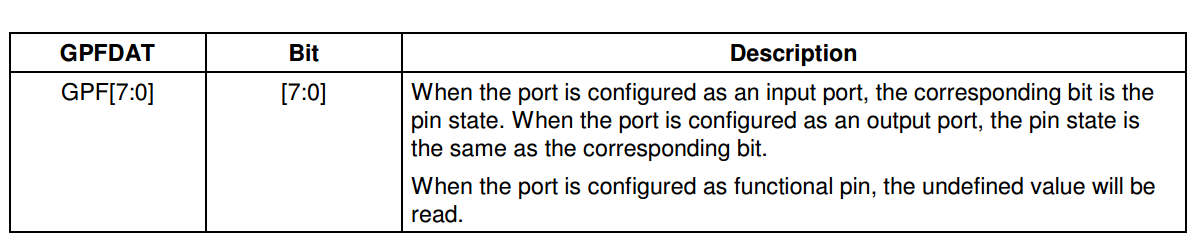
str r0, [r1] /* 设置GPF4输出低电平
* 把0写到地址0x56000054
*/
ldr r1, =0x56000054
ldr r0, = /* mov r0, # */
str r0, [r1] /* 死循环 ,因为flash后面的数据不可预知,只能停留在这里*/
halt:
b halt
这里使用c/c++中的注释方式,其实汇编中应该使用分号; 代表注释。
上述代码只是简单粗暴的完成了任务,但是破坏了寄存器中其他位的数据,作为第一个程序,暂且先这样。
需要使用到上篇随笔安装的两个工具,交叉编译器arm-linux-gcc和samba服务器,这里简单说明一下makefile:
all:
arm-linux-gcc -c -o led_on.o led_on.S
arm-linux-ld -Ttext led_on.o -o led_on.elf
arm-linux-objcopy -O binary -S led_on.elf led_on.bin
arm-linux-objdump -D led_on.elf > led_on.dis
clean:
rm *.bin *.o *.elf
这个makefile显然只能是拿来入门使用,关于其中的工具链用法,在linux系列随笔中已经有过讲解。
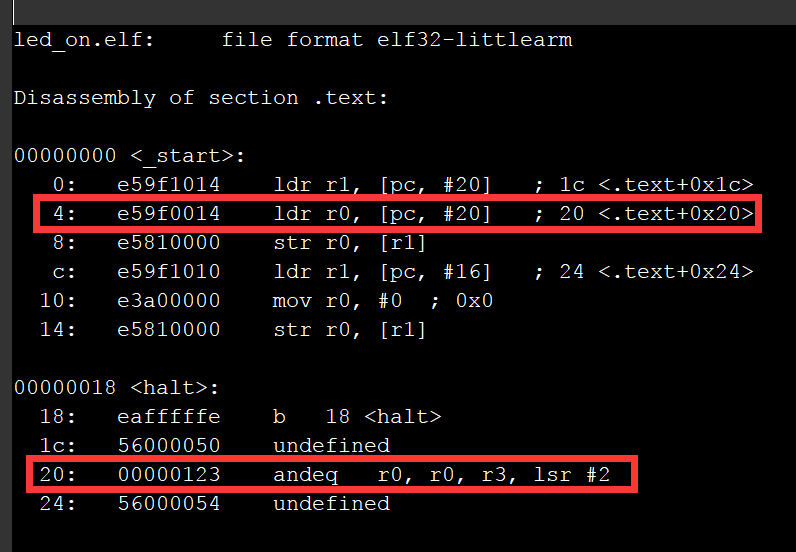
是不是这样就完了呢?显然不是,还要进一步分析反汇编:
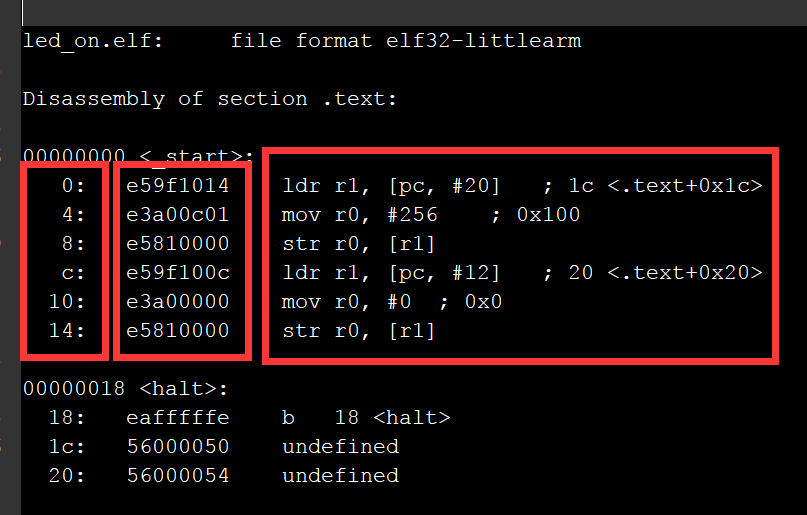
第一列表示地址,第二列表示机器码,第三列表示汇编码。
ARM9采用三级流水线工作方式,可以大大提高系统效率。三级流水线,取址,译码,执行。
当cpu在执行一条指令时,已经开始对下一条指令进行译码,对下下一条指令进行取址了。这也就是我们常说的PC值等于当前指令地址加上8的原因。
分析第一条汇编,r1=[pc+20];此时pc=当前指令地址(0)+8+20=28=0x1c
可以看到在地址1c处,存放的是0x56000050,这就相当于把[pc+20]地址的内容赋值给r1,此时就r1=0x56000050。
第二条指令把256即0x100赋值给r0;
第三条指令,把r0的值写在r1的地址内,即把0x100写进地址0x56000050。后面的以此类推。
分析了反汇编之后,我们就可以通过更改bin文件,即直接更改二进制文件达到点亮led灯的效果。
刚才我们点亮了GPF4,现在点亮GPF 5,只用把上面的0x100改成0x400,其他不变(后面说注意事项)。
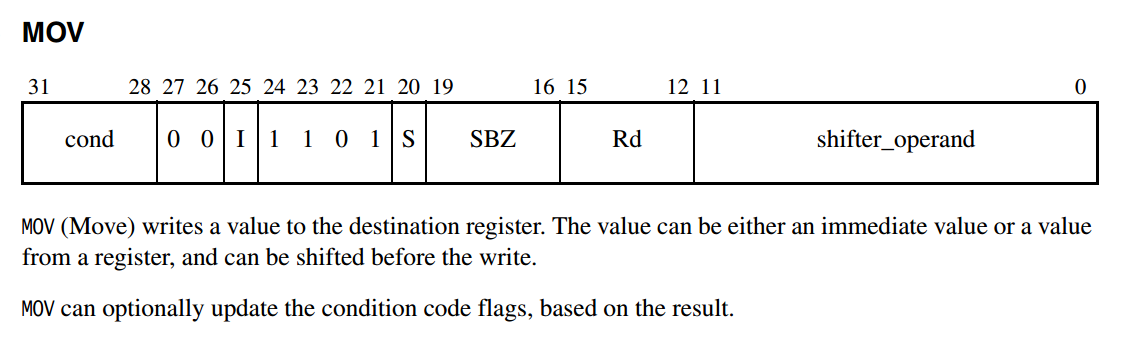
我们知道上面的第二列表示机器码之后,需要达到直接写一串机器码,实现MOV R0,#0X400的功能,此时我们需要查看
MOV指令机器码:
上面生成的二进制文件,可以使用sublime text 或者Uedit32打开。
先看上面我们生成的MOV RO,#256机器码:
e3a00c01
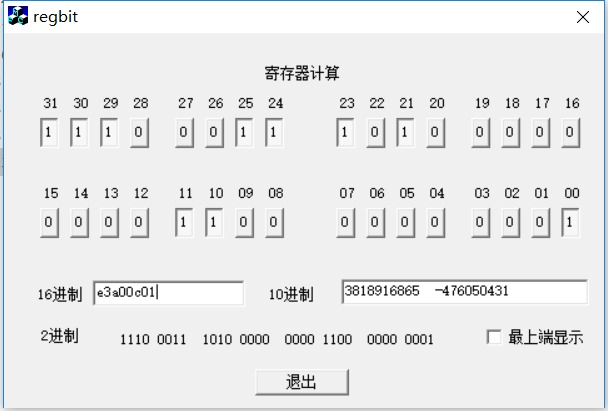
对照上面的MOV机器码,做几点说明,12-15位表示Rd,此时我们使用的是R0,这四个位全为0,表示寄存器R0,最后0-11位(立即数)就是我们需要修改的了。
关于立即数,上面做了说明:
<immediate>=immed_8循环右移(2*rotate_imm)
这里的0-11位高4位就是rotate_imm,低八位就是8位常数immed_8。

0x100的表示如上图,
公式:<immediate>=immed_8循环右移(2*rotate_imm)
高4位12,低八位为1,1循环右移2*12,刚好等于0x100.
那么0x400的呢?
可以想到,0x400,二进制0x1后面10个0,前面就需要22位,所以,我们可以采用1循环右移22位。
/* 中途插播 */
NOTE:
右移本来就是不确定的,左移是确定的,但是,右移的不确定是根据cpu的具体实现来决定的,就是不同的cpu可以有不同的处理,在我们这里,就是特定这个cpu S3C2440,所以我们的右移补位方式这里就是对特定CPU的。这个符合我们的需求,但是在其他硬件平台上,右移如何补位,要查看它的参考资料。
/* 插播 完毕*/
所以我们0x400的立即数就可以表示为:高四位为11,低八位位1,这样就可以切合。有公式完成这个就不再赘述了。
最后得出:
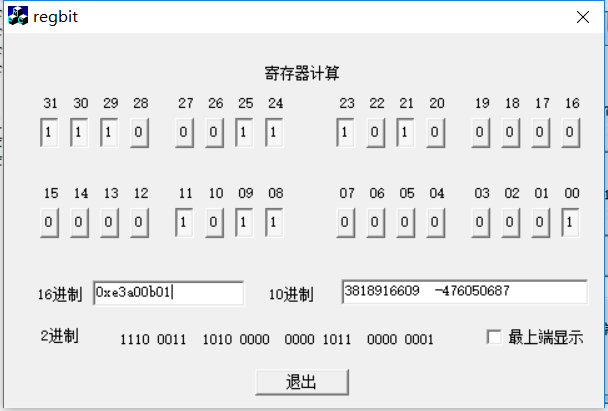
现在我们更改之前的bin文件,把上面MOV r0,#256的机器码改成上图的e3a00b01
烧写进入单板,观察是否点亮GPF 5.
之前的bin文件做一点说明:
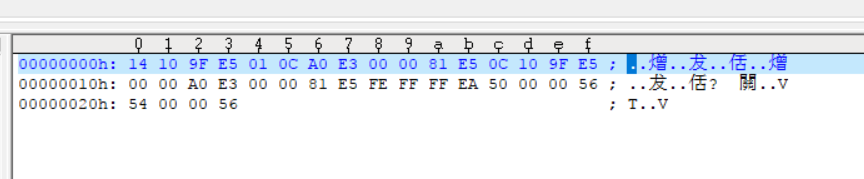

可以看到我们的e59f1014在图1和图2上似乎顺序不同,一个是反的,一个正的。这是因为我们采取单板默认的小端模式进行的开发,小端模式,高位在高地址,地位在低地址。
所以只用把图1中第五列的0c改成0b即可,下载进入,观看现象。当然是被点亮了。
最后,再说明一点,这个更改机器码确实麻烦,我们已经过去了那个写机器码的年代,但是知道这些,总会有好处的,
上面的改写0x400是因为我刚好的写入的是一个立即数,要是例如0x123这样的非立即数数据,是不会反汇编mov指令的,下面测试:

反汇编:
通过这些学习,我们可以和cpu的距离变得更近。
新的开始——LED灯汇编机器码的点亮方式的更多相关文章
- 第7章 使用寄存器点亮LED灯
第7章 使用寄存器点亮LED灯 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/fir ...
- 第7章 使用寄存器点亮LED灯—零死角玩转STM32-F429系列
第7章 使用寄存器点亮LED灯 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/fir ...
- 灵动微电子ARM Cortex M0 MM32F0010 GPIO 的配置驱动LED灯
灵动微电子ARM Cortex M0 MM32F0010 GPIO的配置 目录: 1.前言 2.学习方法简要说明 3.要点提示 4.注意事项 5.MM32F0010系统时钟的配置 6.MM32F001 ...
- 30个物联网传感器小实验:三行代码点亮LED灯
30个物联网传感器小实验:三行代码点亮LED灯 三行代码点亮LED灯 LED灯闪烁 LED灯调亮度 LED淡入淡出 不写一行代码点亮LED灯 全彩RGB灯 面包板 30个物联网传感器小实验:三行代码点 ...
- linux IMX6 汇编点亮一个LED灯
驱动Linux引脚与驱动STM32其实是一样的,都是在操作寄存器,在相应的寄存器上附上相应的值即可驱动. IMX6U手册上有各个管脚的命名,跟STM32不同,IOMUXC_SW_MUC_CTL_PAD ...
- AT89S52汇编实现l通过按键中断切换led灯的四种闪烁模式(单灯左移,单灯右移,双灯左移,双灯右移)
;通过P1口控制8路LED的四种闪烁模式,单独LED灯左移,单独LED灯右移,相邻两个灯左移,相邻两个灯右移;通过一个外部中断0来检测按键的跳变沿来切换闪烁模式,第一次按键按下弹起,灯的闪烁状态由单独 ...
- 25个led灯新玩法
Microbit板子的25个led灯,是5X5的阵列,led(lights emitting diodes)中文叫发光二极管,有单向导电性,还发光,有各种颜色的,红,蓝,黄等等.mPython可以让你 ...
- C语言版——点亮LED灯,深入到栈
在上一篇进行了汇编语言的编写之后,我们采用C语言来编写程序,毕竟C语言才是我们使用最多的语言. 仅仅是点亮LED灯显然太过于简单,我们需要分析最后的反汇编,了解函数调用栈,深入C语言骨髓去分析代码,并 ...
- 起航,第一个程序——还是LED灯
如同学基本语言一样,helloworld是很多语言的第一个程序.在嵌入式开发中,点亮LED灯也是各种架构和开发板的第一个程序,其中很多东西是和单片机例如stm32是类似的,只是,现在我们没有了库函数, ...
随机推荐
- linux下的工作模型以及Nginx工作原理
Web服务器主要任务就是处理来自客户端的请求,一般情况下Web服务器处理并发连接请求的工作模型有以下几种方式: 1.单线程web服务器(Single-threaded web servers) 此 ...
- 自动化安装smokeping-2.6.11脚本
自动化安装Smokeping-2.6.11脚本 一.目的 1.1 监控目的 为方便监测各数据中心网络状况,自定义全国各节点,从而发现网络异常,判断网络故障. 1.2 本文目的 快速部署Smokepin ...
- java中enum的应用
package com.demo; public enum TestEnum { A("hello"), B("world"); private String ...
- HDU 3032 Nim or not Nim? (sg函数)
Nim or not Nim? Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)T ...
- 【Windows】DOS的常用命令
cmd[[{/c|/k}][/s][/q][/d][{/a|/u}][/t:fg][/e:{on|off}][/f:{on|off}][/v:{on|off}]string] 参数 /c 执行stri ...
- 【struts2】Struts2的系统架构
Struts2的官方文档里附带了Struts2的架构图,下面这张图上展示了Struts2的内部模块,以及它们的运行流程. 这张图上分了好多块,彼此之间相互联系,先浏览一下各块的名字,再留心一下运行图最 ...
- Flume与Logstash比较
Flume与Logstash相比,个人的体会如下: Logstash比较偏重于字段的预处理:而Flume偏重数据的传输: Logstash有几十个插件,配置灵活:FLume则是强调用户的自定义开发(s ...
- C++模板”>>”编译问题与词法消歧设计
在编译理论中,通常将编译过程抽象为5个主要阶段:词法分析(Lexical Analysis),语法分析(Parsing),语义分析(Semantic Analysis),优化(Optimization ...
- Cadence 5141 下TSMC 05U工艺库安装
以下资料摘自:<T13RF PDK簡介>-張文旭 观念与TSMC工艺库的安装 管理者安裝TSMC 0.13 MS/RF的環境下之PDK的安裝方式相當容易,首先以root的方式進入Unix/ ...
- logtash 接收多配置文件
[root@10-19-148-59 etc]# vim front_esb.conf input { beats { type => beats port => 5077 } } fil ...