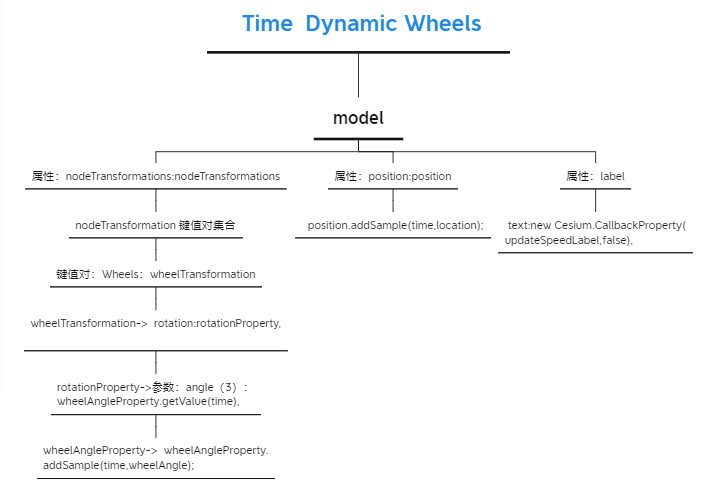
Cesium案例(六) Time Dynamic Wheels
Cesium案例(六) Time Dynamic Wheels的更多相关文章
- WPF案例 (六) 动态切换UI布局
原文:WPF案例 (六) 动态切换UI布局 这个Wpf示例对同一个界面支持以ListView或者CardView的布局方式呈现界面,使用控件ItemsControl绑定数据源,使用DataTempla ...
- cesium 学习(六) 坐标转换
cesium 学习(六) 坐标转换 一.前言 在场景中,不管是二维还好还是三维也罢,只要涉及到空间概念都会提到坐标,坐标是让我们理解位置的一个非常有效的东西.有了坐标,我们能很快的确定位置相关关系,但 ...
- Httpd服务入门知识-Httpd服务常见配置案例之DSO( Dynamic Shared Object)加载动态模块配置
Httpd服务入门知识-Httpd服务常见配置案例之DSO( Dynamic Shared Object)加载动态模块配置 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.加载动 ...
- Cesium案例解析(六)——3DTilesInspector监视器
目录 1. 概述 2. 案例 1. 概述 3D Tiles作为传输和渲染大规模3D地理空间数据的格式,应对的都是大规模数据的场景,Cesium提供了一个监视3D Tiles数据的监视器,可以通过这个监 ...
- CSharp 案例:用 Dynamic 来解决 DataTable 数值累加问题
需求说明 给定一个 DataTable,如果从中取出数值类型列的值并对其累加? 限制:不知该列是何种数值类型. 解决方案 1.将表转换为 IEnumerable<dynamic>,而后获取 ...
- Cesium案例解析(五)——3DTilesPhotogrammetry摄影测量3DTiles数据
目录 1. 概述 2. 案例 3. 结果 1. 概述 3D Tiles是用于传输和渲染大规模3D地理空间数据的格式,例如摄影测量,3D建筑,BIM / CAD,实例化特征和点云等.与常规的模型文件格式 ...
- Cesium案例解析(三)——Camera相机
目录 1. 概述 2. 实例 2.1. Camera.html 2.2. Camera.js 2.2.1. 飞行至某一点 2.2.2. 飞行至某区域 2.2.3. 两地之间飞行 2.2.4. 设置视图 ...
- awk处理之案例六:awk根据条件插入文本
编译环境 本系列文章所提供的算法均在以下环境下编译通过. [脚本编译环境]Federa 8,linux 2.6.35.6-45.fc14.i686 [处理器] Intel(R) Core(TM)2 Q ...
- Cesium案例解析(二)——ImageryLayers影像图层
目录 1. 概述 2. 实例 2.1. ImageryLayers.html 2.2. ImageryLayers.js 2.2.1. 代码 2.2.2. 解析 3. 结果 1. 概述 Cesium支 ...
- Cesium案例解析(一)——HelloWorld
目录 1. 概述 2. 实例 2.1. HelloWorld.html 2.2. HelloWorld.js 3. 结果 1. 概述 感觉网上已经有不少关于cesium的教程了,但是学习一个框架最快的 ...
随机推荐
- 注释中的Unicode编码也会被转义
现象 public class Unicode { public static void main(String[] args) { // \u000d System.out.println(&quo ...
- LeetCode刷题感想之DFS
在剑指Offer里专门有一个部分(大概是连续十几题的样子)考察了 DFS ,也就是深度优先遍历,感觉DFS 也是一种套路,只要思路找对,套一下思路也可以了,在这里记录一下. 在很多Leetcode 的 ...
- [fiddler的使用]模拟自动回复功能在模拟测试mock第三方对接系统的返回中的使用场景
[场景描述]在许多对第三方的测试过程中,由于第三方没有测试环境或者测试环境同步开发的时候还未准备好,或者系统间联调时对方还未完成的各种情况下,我们可以通过fiddler来模拟对方的返回. [操作步骤] ...
- 如何简单使用Git
Git基本功能 Git基本功能 在具体介绍Git能做什么之前,先来了解下Git里的四个角色: workspace: 本地的工作空间. index:缓存区域,临时保存本地改动. local reposi ...
- 解决navicat远程连接MySQL失败,报错1130问题
1select host from user where user='root'; 2update user set host = '%' where user ='root';3flush priv ...
- Crypto入门 (九) easy_RSA
前言: 建议看这篇随笔之前先看入门(8)数论基础,简单学习下,有利于你看懂后面得算法原理,链接给出:https://www.cnblogs.com/yuanchu/p/13494104.html ea ...
- HCK 、PCLK、FCLK的区别
HCLK is used for AHB bus, which is used by the ARM920T, the memory controller, the interrupt control ...
- 宝塔linux面板进行数据库操作显示"数据库管理密码"
在使用宝塔linux面板时,对数据库进行操作之后,显示数据库管理密码错误.经历了卸载数据库并删除了数据库文件和olddata, 在从新安装,仍然显示数据库管理密码错误. 这时,我们可以进入到 /www ...
- jmeter学习-性能指标、jmeter初识
一:性能测试的指标 1. 并发/并发数/并发用户数 狭义的并发:同一时间做相同的一件事 广义的并发:同一时间做不同事情,混合场景,对服务器来说的并发 性能测试,先做简单的狭义并发,在做广义并发:先做单 ...
- 将spring boot项目打包成jar包
在spring boot项目的pom文件中加入 <packaging>jar</packaging> 生成jar包 文件右键Open In Explorer找到文件所在位置 可 ...