VI ORB-SLAM初始化与VINS初始化对比(将vi orb-slam初始化方法移植到vins中)
初始化时需要求出的变量:相机和imu外参r t、重力g、尺度s、陀螺仪和加速度计偏置ba bg。
下面对两种算法初始化的详细步骤进行对比:
求陀螺仪偏置bg
- 求解公式相同,求解方法不同。公式如下,VI ORB-SLAM使用图优化的方式。

Vector3d Optimizer::OptimizeInitialGyroBias(const vector<cv::Mat>& vTwc, const vector<IMUPreintegrator>& vImuPreInt)
{
int N = vTwc.size(); if(vTwc.size()!=vImuPreInt.size()) cerr<<"vTwc.size()!=vImuPreInt.size()"<<endl;
Matrix4d Tbc = ConfigParam::GetEigTbc();
Matrix3d Rcb = Tbc.topLeftCorner(,).transpose(); // Setup optimizer
g2o::SparseOptimizer optimizer;
g2o::BlockSolverX::LinearSolverType * linearSolver; linearSolver = new g2o::LinearSolverEigen<g2o::BlockSolverX::PoseMatrixType>(); g2o::BlockSolverX * solver_ptr = new g2o::BlockSolverX(linearSolver); g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton(solver_ptr);
//g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
optimizer.setAlgorithm(solver); // Add vertex of gyro bias, to optimizer graph
g2o::VertexGyrBias * vBiasg = new g2o::VertexGyrBias();
vBiasg->setEstimate(Eigen::Vector3d::Zero());
vBiasg->setId();
optimizer.addVertex(vBiasg); // Add unary edges for gyro bias vertex
//for(std::vector<KeyFrame*>::const_iterator lit=vpKFs.begin(), lend=vpKFs.end(); lit!=lend; lit++)
for(int i=; i<N; i++)
{
// Ignore the first KF
if(i==)
continue; const cv::Mat& Twi = vTwc[i-]; // pose of previous KF
Matrix3d Rwci = Converter::toMatrix3d(Twi.rowRange(,).colRange(,));
//Matrix3d Rwci = Twi.rotation_matrix();
const cv::Mat& Twj = vTwc[i]; // pose of this KF
Matrix3d Rwcj = Converter::toMatrix3d(Twj.rowRange(,).colRange(,));
//Matrix3d Rwcj =Twj.rotation_matrix(); const IMUPreintegrator& imupreint = vImuPreInt[i]; g2o::EdgeGyrBias * eBiasg = new g2o::EdgeGyrBias();
eBiasg->setVertex(, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex()));
// measurement is not used in EdgeGyrBias
eBiasg->dRbij = imupreint.getDeltaR();
eBiasg->J_dR_bg = imupreint.getJRBiasg();
eBiasg->Rwbi = Rwci*Rcb;
eBiasg->Rwbj = Rwcj*Rcb;
//eBiasg->setInformation(Eigen::Matrix3d::Identity());
eBiasg->setInformation(imupreint.getCovPVPhi().bottomRightCorner(,).inverse());
optimizer.addEdge(eBiasg);
} // It's actualy a linear estimator, so 1 iteration is enough.
//optimizer.setVerbose(true);
optimizer.initializeOptimization();
optimizer.optimize(); g2o::VertexGyrBias * vBgEst = static_cast<g2o::VertexGyrBias*>(optimizer.vertex()); return vBgEst->estimate();
}
- VINS中公式如下。使用LDLT分解,解方程组。
void solveGyroscopeBias(map<double, ImageFrame> &all_image_frame, Vector3d* Bgs)
{
Matrix3d A;
Vector3d b;
Vector3d delta_bg;
A.setZero();
b.setZero();
map<double, ImageFrame>::iterator frame_i;
map<double, ImageFrame>::iterator frame_j;
for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i++)
{
frame_j = next(frame_i);
MatrixXd tmp_A(, );
tmp_A.setZero();
VectorXd tmp_b();
tmp_b.setZero();
Eigen::Quaterniond q_ij(frame_i->second.R.transpose() * frame_j->second.R);
tmp_A = frame_j->second.pre_integration->jacobian.template block<, >(O_R, O_BG);
tmp_b = * (frame_j->second.pre_integration->delta_q.inverse() * q_ij).vec();
A += tmp_A.transpose() * tmp_A;
b += tmp_A.transpose() * tmp_b; }
delta_bg = A.ldlt().solve(b);
ROS_WARN_STREAM("gyroscope bias initial calibration " << delta_bg.transpose()); for (int i = ; i <= WINDOW_SIZE; i++)
Bgs[i] += delta_bg; for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end( ); frame_i++)
{
frame_j = next(frame_i);
frame_j->second.pre_integration->repropagate(Vector3d::Zero(), Bgs[]);
}
}
求重力加速度g、尺度s和外参平移量T
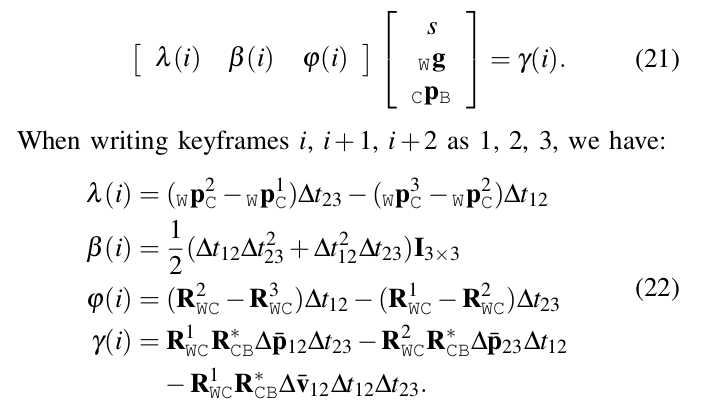
- VINS中并没有求外参T,而是在紧耦合优化时以初值为0直接进行优化。两算法求取公式略有不同。VI ORB-SLAM公式如下,使用SVD分解求解方程的解:
// Solve A*x=B for x=[s,gw] 4x1 vector
cv::Mat A = cv::Mat::zeros(*(N-),,CV_32F);
cv::Mat B = cv::Mat::zeros(*(N-),,CV_32F);
cv::Mat I3 = cv::Mat::eye(,,CV_32F); // Step 2.
// Approx Scale and Gravity vector in 'world' frame (first KF's camera frame)
for(int i=; i<N-; i++)
{
//KeyFrameInit* pKF1 = vKFInit[i];//vScaleGravityKF[i];
KeyFrameInit* pKF2 = vKFInit[i+];
KeyFrameInit* pKF3 = vKFInit[i+];
// Delta time between frames
double dt12 = pKF2->mIMUPreInt.getDeltaTime();
double dt23 = pKF3->mIMUPreInt.getDeltaTime();
// Pre-integrated measurements
cv::Mat dp12 = Converter::toCvMat(pKF2->mIMUPreInt.getDeltaP());
cv::Mat dv12 = Converter::toCvMat(pKF2->mIMUPreInt.getDeltaV());
cv::Mat dp23 = Converter::toCvMat(pKF3->mIMUPreInt.getDeltaP()); // Pose of camera in world frame
cv::Mat Twc1 = vTwc[i].clone();//pKF1->GetPoseInverse();
cv::Mat Twc2 = vTwc[i+].clone();//pKF2->GetPoseInverse();
cv::Mat Twc3 = vTwc[i+].clone();//pKF3->GetPoseInverse();
// Position of camera center
cv::Mat pc1 = Twc1.rowRange(,).col();
cv::Mat pc2 = Twc2.rowRange(,).col();
cv::Mat pc3 = Twc3.rowRange(,).col();
// Rotation of camera, Rwc
cv::Mat Rc1 = Twc1.rowRange(,).colRange(,);
cv::Mat Rc2 = Twc2.rowRange(,).colRange(,);
cv::Mat Rc3 = Twc3.rowRange(,).colRange(,); // Stack to A/B matrix
// lambda*s + beta*g = gamma
cv::Mat lambda = (pc2-pc1)*dt23 + (pc2-pc3)*dt12;
cv::Mat beta = 0.5*I3*(dt12*dt12*dt23 + dt12*dt23*dt23);
cv::Mat gamma = (Rc3-Rc2)*pcb*dt12 + (Rc1-Rc2)*pcb*dt23 + Rc1*Rcb*dp12*dt23 - Rc2*Rcb*dp23*dt12 - Rc1*Rcb*dv12*dt12*dt23;
lambda.copyTo(A.rowRange(*i+,*i+).col());
beta.copyTo(A.rowRange(*i+,*i+).colRange(,));
gamma.copyTo(B.rowRange(*i+,*i+));
// Tested the formulation in paper, -gamma. Then the scale and gravity vector is -xx // Debug log
//cout<<"iter "<<i<<endl;
}
// Use svd to compute A*x=B, x=[s,gw] 4x1 vector
// A = u*w*vt, u*w*vt*x=B
// Then x = vt'*winv*u'*B
cv::Mat w,u,vt;
// Note w is 4x1 vector by SVDecomp()
// A is changed in SVDecomp() with cv::SVD::MODIFY_A for speed
cv::SVDecomp(A,w,u,vt,cv::SVD::MODIFY_A);
// Debug log
//cout<<"u:"<<endl<<u<<endl;
//cout<<"vt:"<<endl<<vt<<endl;
//cout<<"w:"<<endl<<w<<endl; // Compute winv
cv::Mat winv=cv::Mat::eye(,,CV_32F);
for(int i=;i<;i++)
{
if(fabs(w.at<float>(i))<1e-)
{
w.at<float>(i) += 1e-;
// Test log
cerr<<"w(i) < 1e-10, w="<<endl<<w<<endl;
} winv.at<float>(i,i) = ./w.at<float>(i);
}
// Then x = vt'*winv*u'*B
cv::Mat x = vt.t()*winv*u.t()*B; // x=[s,gw] 4x1 vector
double sstar = x.at<float>(); // scale should be positive
cv::Mat gwstar = x.rowRange(,); // gravity should be about ~9.8
- VINS求出尺度s、重力加速度g和速度v(这里求出滑窗内每帧的速度v意义在哪里?),并没有求外参的平移,方法为LDLT分解。公式如下:

bool LinearAlignment(map<double, ImageFrame> &all_image_frame, Vector3d &g, VectorXd &x)
{
int all_frame_count = all_image_frame.size();
int n_state = all_frame_count * + + ; MatrixXd A{n_state, n_state};
A.setZero();
VectorXd b{n_state};
b.setZero(); map<double, ImageFrame>::iterator frame_i;
map<double, ImageFrame>::iterator frame_j;
int i = ;
for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i++, i++)
{
frame_j = next(frame_i); MatrixXd tmp_A(, );
tmp_A.setZero();
VectorXd tmp_b();
tmp_b.setZero(); double dt = frame_j->second.pre_integration->sum_dt; tmp_A.block<, >(, ) = -dt * Matrix3d::Identity();
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * dt * dt / * Matrix3d::Identity();
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T) / 100.0;
tmp_b.block<, >(, ) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[] - TIC[];
//cout << "delta_p " << frame_j->second.pre_integration->delta_p.transpose() << endl;
tmp_A.block<, >(, ) = -Matrix3d::Identity();
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * frame_j->second.R;
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * dt * Matrix3d::Identity();
tmp_b.block<, >(, ) = frame_j->second.pre_integration->delta_v;
//cout << "delta_v " << frame_j->second.pre_integration->delta_v.transpose() << endl; Matrix<double, , > cov_inv = Matrix<double, , >::Zero();
//cov.block<6, 6>(0, 0) = IMU_cov[i + 1];
//MatrixXd cov_inv = cov.inverse();
cov_inv.setIdentity(); MatrixXd r_A = tmp_A.transpose() * cov_inv * tmp_A;
VectorXd r_b = tmp_A.transpose() * cov_inv * tmp_b; A.block<, >(i * , i * ) += r_A.topLeftCorner<, >();
b.segment<>(i * ) += r_b.head<>(); A.bottomRightCorner<, >() += r_A.bottomRightCorner<, >();
b.tail<>() += r_b.tail<>(); A.block<, >(i * , n_state - ) += r_A.topRightCorner<, >();
A.block<, >(n_state - , i * ) += r_A.bottomLeftCorner<, >();
}
A = A * 1000.0;
b = b * 1000.0;
x = A.ldlt().solve(b);
double s = x(n_state - ) / 100.0;
ROS_DEBUG("estimated scale: %f", s);
g = x.segment<>(n_state - );
ROS_DEBUG_STREAM(" result g " << g.norm() << " " << g.transpose());
if(fabs(g.norm() - G.norm()) > 1.0 || s < )
{
return false;
} RefineGravity(all_image_frame, g, x);
s = (x.tail<>())() / 100.0;
(x.tail<>())() = s;
ROS_DEBUG_STREAM(" refine " << g.norm() << " " << g.transpose());
if(s < 0.0 )
return false;
else
return true;
}
这里在求出g之后,还对其进行了优化,方法为LDLT分解,公式如下。
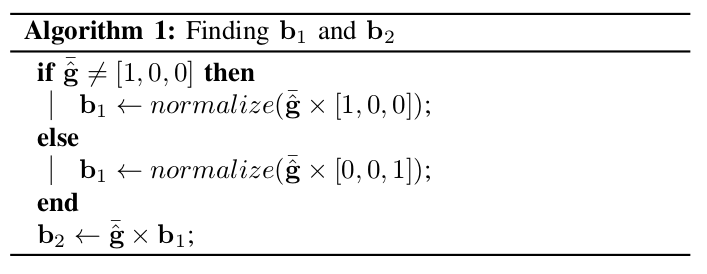
void RefineGravity(map<double, ImageFrame> &all_image_frame, Vector3d &g, VectorXd &x)
{
Vector3d g0 = g.normalized() * G.norm();
Vector3d lx, ly;
//VectorXd x;
int all_frame_count = all_image_frame.size();
int n_state = all_frame_count * + + ; MatrixXd A{n_state, n_state};
A.setZero();
VectorXd b{n_state};
b.setZero(); map<double, ImageFrame>::iterator frame_i;
map<double, ImageFrame>::iterator frame_j;
for(int k = ; k < ; k++)
{
MatrixXd lxly(, );
lxly = TangentBasis(g0);
int i = ;
for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i++, i++)
{
frame_j = next(frame_i); MatrixXd tmp_A(, );
tmp_A.setZero();
VectorXd tmp_b();
tmp_b.setZero(); double dt = frame_j->second.pre_integration->sum_dt; tmp_A.block<, >(, ) = -dt * Matrix3d::Identity();
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * dt * dt / * Matrix3d::Identity() * lxly;
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T) / 100.0;
tmp_b.block<, >(, ) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[] - TIC[] - frame_i->second.R.transpose() * dt * dt / * g0; tmp_A.block<, >(, ) = -Matrix3d::Identity();
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * frame_j->second.R;
tmp_A.block<, >(, ) = frame_i->second.R.transpose() * dt * Matrix3d::Identity() * lxly;
tmp_b.block<, >(, ) = frame_j->second.pre_integration->delta_v - frame_i->second.R.transpose() * dt * Matrix3d::Identity() * g0; Matrix<double, , > cov_inv = Matrix<double, , >::Zero();
//cov.block<6, 6>(0, 0) = IMU_cov[i + 1];
//MatrixXd cov_inv = cov.inverse();
cov_inv.setIdentity(); MatrixXd r_A = tmp_A.transpose() * cov_inv * tmp_A;
VectorXd r_b = tmp_A.transpose() * cov_inv * tmp_b; A.block<, >(i * , i * ) += r_A.topLeftCorner<, >();
b.segment<>(i * ) += r_b.head<>(); A.bottomRightCorner<, >() += r_A.bottomRightCorner<, >();
b.tail<>() += r_b.tail<>(); A.block<, >(i * , n_state - ) += r_A.topRightCorner<, >();
A.block<, >(n_state - , i * ) += r_A.bottomLeftCorner<, >();
}
A = A * 1000.0;
b = b * 1000.0;
x = A.ldlt().solve(b);
VectorXd dg = x.segment<>(n_state - );
g0 = (g0 + lxly * dg).normalized() * G.norm();
//double s = x(n_state - 1);
}
g = g0;
}
求加速度计偏置
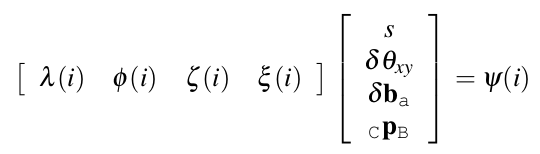
- VINS中并没有计算该值,和外参T一样,是在后面直接进行优化。VI ORB-SLAM中则单独对该值进行了求取,求取方式同样为SVD公式如下:
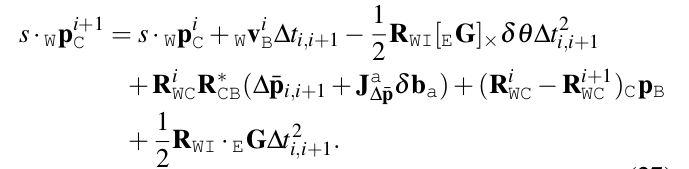
// Step 3.
// Use gravity magnitude 9.8 as constraint
// gI = [0;0;1], the normalized gravity vector in an inertial frame, NED type with no orientation.
cv::Mat gI = cv::Mat::zeros(,,CV_32F);
gI.at<float>() = ;
// Normalized approx. gravity vecotr in world frame
cv::Mat gwn = gwstar/cv::norm(gwstar);
// Debug log
//cout<<"gw normalized: "<<gwn<<endl; // vhat = (gI x gw) / |gI x gw|
cv::Mat gIxgwn = gI.cross(gwn);
double normgIxgwn = cv::norm(gIxgwn);
cv::Mat vhat = gIxgwn/normgIxgwn;
double theta = std::atan2(normgIxgwn,gI.dot(gwn));
// Debug log
//cout<<"vhat: "<<vhat<<", theta: "<<theta*180.0/M_PI<<endl; Eigen::Vector3d vhateig = Converter::toVector3d(vhat);
Eigen::Matrix3d RWIeig = Sophus::SO3::exp(vhateig*theta).matrix();
cv::Mat Rwi = Converter::toCvMat(RWIeig);
cv::Mat GI = gI*ConfigParam::GetG();//9.8012;
// Solve C*x=D for x=[s,dthetaxy,ba] (1+2+3)x1 vector
cv::Mat C = cv::Mat::zeros(*(N-),,CV_32F);
cv::Mat D = cv::Mat::zeros(*(N-),,CV_32F); for(int i=; i<N-; i++)
{
//KeyFrameInit* pKF1 = vKFInit[i];//vScaleGravityKF[i];
KeyFrameInit* pKF2 = vKFInit[i+];
KeyFrameInit* pKF3 = vKFInit[i+];
// Delta time between frames
double dt12 = pKF2->mIMUPreInt.getDeltaTime();
double dt23 = pKF3->mIMUPreInt.getDeltaTime();
// Pre-integrated measurements
cv::Mat dp12 = Converter::toCvMat(pKF2->mIMUPreInt.getDeltaP());
cv::Mat dv12 = Converter::toCvMat(pKF2->mIMUPreInt.getDeltaV());
cv::Mat dp23 = Converter::toCvMat(pKF3->mIMUPreInt.getDeltaP());
cv::Mat Jpba12 = Converter::toCvMat(pKF2->mIMUPreInt.getJPBiasa());
cv::Mat Jvba12 = Converter::toCvMat(pKF2->mIMUPreInt.getJVBiasa());
cv::Mat Jpba23 = Converter::toCvMat(pKF3->mIMUPreInt.getJPBiasa());
// Pose of camera in world frame
cv::Mat Twc1 = vTwc[i].clone();//pKF1->GetPoseInverse();
cv::Mat Twc2 = vTwc[i+].clone();//pKF2->GetPoseInverse();
cv::Mat Twc3 = vTwc[i+].clone();//pKF3->GetPoseInverse();
// Position of camera center
cv::Mat pc1 = Twc1.rowRange(,).col();
cv::Mat pc2 = Twc2.rowRange(,).col();
cv::Mat pc3 = Twc3.rowRange(,).col();
// Rotation of camera, Rwc
cv::Mat Rc1 = Twc1.rowRange(,).colRange(,);
cv::Mat Rc2 = Twc2.rowRange(,).colRange(,);
cv::Mat Rc3 = Twc3.rowRange(,).colRange(,);
// Stack to C/D matrix
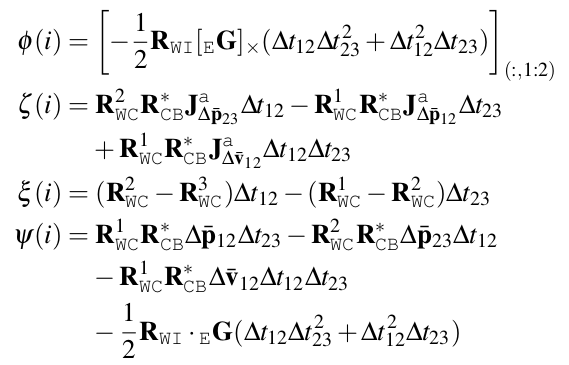
// lambda*s + phi*dthetaxy + zeta*ba = psi
cv::Mat lambda = (pc2-pc1)*dt23 + (pc2-pc3)*dt12;
cv::Mat phi = - 0.5*(dt12*dt12*dt23 + dt12*dt23*dt23)*Rwi*SkewSymmetricMatrix(GI); // note: this has a '-', different to paper
cv::Mat zeta = Rc2*Rcb*Jpba23*dt12 + Rc1*Rcb*Jvba12*dt12*dt23 - Rc1*Rcb*Jpba12*dt23;
cv::Mat psi = (Rc1-Rc2)*pcb*dt23 + Rc1*Rcb*dp12*dt23 - (Rc2-Rc3)*pcb*dt12
- Rc2*Rcb*dp23*dt12 - Rc1*Rcb*dv12*dt23*dt12 - 0.5*Rwi*GI*(dt12*dt12*dt23 + dt12*dt23*dt23); // note: - paper
lambda.copyTo(C.rowRange(*i+,*i+).col());
phi.colRange(,).copyTo(C.rowRange(*i+,*i+).colRange(,)); //only the first 2 columns, third term in dtheta is zero, here compute dthetaxy 2x1.
zeta.copyTo(C.rowRange(*i+,*i+).colRange(,));
psi.copyTo(D.rowRange(*i+,*i+)); // Debug log
//cout<<"iter "<<i<<endl;
} // Use svd to compute C*x=D, x=[s,dthetaxy,ba] 6x1 vector
// C = u*w*vt, u*w*vt*x=D
// Then x = vt'*winv*u'*D
cv::Mat w2,u2,vt2;
// Note w2 is 6x1 vector by SVDecomp()
// C is changed in SVDecomp() with cv::SVD::MODIFY_A for speed
cv::SVDecomp(C,w2,u2,vt2,cv::SVD::MODIFY_A);
// Debug log
//cout<<"u2:"<<endl<<u2<<endl;
//cout<<"vt2:"<<endl<<vt2<<endl;
//cout<<"w2:"<<endl<<w2<<endl; // Compute winv
cv::Mat w2inv=cv::Mat::eye(,,CV_32F);
for(int i=;i<;i++)
{
if(fabs(w2.at<float>(i))<1e-)
{
w2.at<float>(i) += 1e-;
// Test log
cerr<<"w2(i) < 1e-10, w="<<endl<<w2<<endl;
} w2inv.at<float>(i,i) = ./w2.at<float>(i);
}
// Then y = vt'*winv*u'*D
cv::Mat y = vt2.t()*w2inv*u2.t()*D; double s_ = y.at<float>();
cv::Mat dthetaxy = y.rowRange(,);
cv::Mat dbiasa_ = y.rowRange(,);
Vector3d dbiasa_eig = Converter::toVector3d(dbiasa_); // dtheta = [dx;dy;0]
cv::Mat dtheta = cv::Mat::zeros(,,CV_32F);
dthetaxy.copyTo(dtheta.rowRange(,));
Eigen::Vector3d dthetaeig = Converter::toVector3d(dtheta);
// Rwi_ = Rwi*exp(dtheta)
Eigen::Matrix3d Rwieig_ = RWIeig*Sophus::SO3::exp(dthetaeig).matrix();
cv::Mat Rwi_ = Converter::toCvMat(Rwieig_);
VI ORB-SLAM初始化与VINS初始化对比(将vi orb-slam初始化方法移植到vins中)的更多相关文章
- 关于跨进程使用回调函数的研究:以跨进程获取Richedit中RTF流为例(在Delphi 初始化每一个TWinControl 对象时,将会在窗体 的属性(PropData)中加入一些标志,DLL的HInstance的值与HOST 进程的HInstance并不一致)
建议先参考我上次写的博文跨进程获取Richedit中Text: 获得QQ聊天输入框中的内容 拿到这个问题,我习惯性地会从VCL内核开始分析.找到TRichEdit声明的单元,分析TRichEdit保存 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- Linux下对比两个文件夹的方法
最近拿到一份源代码,要命的是这份源代码是浅克隆模式的git包,所以无法完整显示里面的修改的内容. 今天花了一点点时间,找了一个在Linux对比两个文件夹的方法. 其实方法很简单,用meld 去对比两个 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- 为了让vi命令也可以使用vim的配置,需要修改 vi /etc/bashrc 增加一行 alias vi='vim'此时,经过上面配置已经可以显示语法高亮了
为了让vi命令也可以使用vim的配置,需要修改 vi /etc/bashrc 增加一行 aliasvi='vim'此时,经过上面配置已经可以显示语法高亮了
- easyui的combobox下拉框初始化默认值以及保持该值一直显示的方法
easyui的combobox下拉框默认初始值是空,下面是实现从远程加载数据之后初始化默认值,以及让该值一直排在下拉框的最顶部的方式. 目前的需求是需要在初始化的时候添加"全部数据库&quo ...
- 一天搞定CSS: 标签样式初始化(CSS reset)及淘宝样式初始化代码--09
样式初始化:是指对HTML中某些标签的默认样式进行清除 样式初始化目的: 不同浏览器的默认样式不一样,若不清理,会导致相同的代码在浏览器中解析结果不一样,为了避免这种情况,所以需要进行样式初始化. 代 ...
- k8s中初始化容器(init container)的作用及其使用方法
概述 在容器的部署过程中,有的时候需要在容器运行之前进行一些预配置的工作,比如下载配置,判断某些服务是否启动,修改配置等一些准备的工作,想要实现这些功能,在k8s中可以使用初始化容器,在应用容器运行之 ...
- Delphi会自动初始化全局变量和类成员变量,但不初始化局部变量
If you don't explicitly initialize a global variable, the compiler initializes it to 0. Object insta ...
随机推荐
- [翻译] USING GIT IN XCODE [2] 在XCODE中使用GIT[2]
USING GIT IN XCODE http://www.cimgf.com/2013/12/10/using-git-in-xcode/ USING AN EXISTING REMOTE PROJ ...
- 用以替换系统NSLog的YouXianMingLog
用以替换系统NSLog的YouXianMingLog 这是本人自己使用并改良的用以替换系统NSLog的类,非常好用,以下是使用示例,现在开源出来并提供源码,好用的话顶一下吧^_^ 效果: YouXia ...
- Python(二)列表的增删改查
一,列表的增删改查 列表中增加元素: 1,从列表的末尾增加一个元素:append("") 2,从列表中插入一个元素:insert(下标位置,插入的元素) 合并列表: 1,name. ...
- Linux chown命令详解
chown将指定文件的拥有者改为指定的用户或组,用户可以是用户名或者用户ID:组可以是组名或者组ID:文件是以空格分开的要改变权限的文件列表,支持通配符. chown常见命令参数 Usage: cho ...
- 铁乐学python_day03-作业
1.有变量name = "aleX leNb" 完成如下操作: 移除name变量对应的值两边的空格,并输出处理结果 n1 = name.strip() print(n1) 结果:a ...
- iis7.5加fck解析漏洞后台拿shell
记录下来 经常用到 电脑准备格式化了 一切从头开始 每天浑浑噩噩的不知道干什么.认准一样东西 认认真真的学 IIS6.0解析漏洞,可以上传a.asp;.jps或者a.asp;a.jpg或者a.asp目 ...
- eclipse导入maven工程missing artifact(实际是存在的)错误解决
找到出错的jar包文件位置,删掉_maven.repositories文件(或用文本编辑器打开,将“>main=”改为“>=”,即删除main,当然main也可能是其他值),然后updat ...
- [转]IE9.0或者360下js(JavaScript、jQuery)不能正确执行(加载),按F12后执行正常;Firefox下ajax的success返回数据data(json、string)无法获取
兼容问题1: 页面的分享等插件加载不全,并无法点击. 兼容问题2: IE下页面选择器(#id..class.etc.)绑定click事件无法访问到,后台springmvc方法,也无法获取ajax的su ...
- Spring AbstractApplicationContext抽象类的refresh()方法--笔记
Spring中AbstractApplicationContext抽象类的refresh()方法是用来刷新Spring的应用上下文的.下面Spring的应用上下文我都叫作context @Overri ...
- sql按月模糊查询
select * from tb where convert(varchar(7),date,120) = '2011-05'