behavior planning——14.implement a cost function in C++
n most situations, a single cost function will not be sufficient to produce complex vehicle behavior. In this quiz, we'd like you to implement one more cost function in C++. We will use these two C++ cost functions later in the lesson. The goal with this quiz is to create a cost function that would make the vehicle drive in the fastest possible lane, given several behavior options. We will provide the following four inputs to the function:
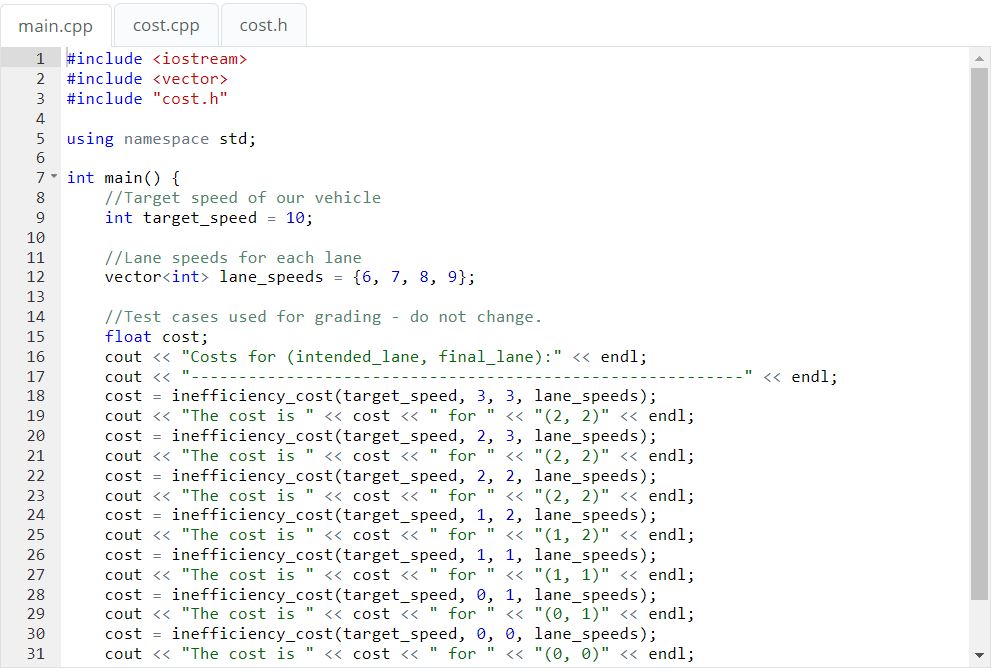
- Target speed: Currently set as 10 (unitless), the speed at which you would like the vehicle to travel.
- Intended lane: the intended lane for the given behavior. For PLCR, PLCL, LCR, and LCL, this would be the one lane over from the current lane.
- Final lane: the immediate resulting lane of the given behavior. For LCR and LCL, this would be one lane over.
- A vector of lane speeds, based on traffic in that lane: {6, 7, 8, 9}.
Your task in the implementation will be to create a cost function that satisifes:
- The cost decreases as both intended lane and final lane are higher speed lanes.
- The cost function provides different costs for each possible behavior: KL, PLCR/PLCL, LCR/LCL.
- The values produced by the cost function are in the range 0 to 1.
You can implement your solution in cost.cpp below.
cost.cpp
float inefficiency_cost (int target_speed, int intended_lane,int final_lane, vector<int> lane_speeds)
{
float speed_intended=lane_speeds[intended_lane];
float speed_final=lane_speeds[final_lane];
float cost=(2.0*target_speed-speed_intended-speed_final)/target_speed;
return cost;
}
behavior planning——14.implement a cost function in C++的更多相关文章
- behavior planning——13. implement a cost function in C++
In the previous quizzes, you designed a cost function to choose a lane when trying to reach a goal i ...
- behavior planning——11 create a cost function speed penalty
A key part of getting transitions to happen when we want them to is the design of reasonable cost ...
- behavior planning——15.cost function design weightTweaking
Designing cost functions is difficult and getting them all to cooperate to produce reasionable vehic ...
- behavior planning——12.example cost funtion -lane change penalty
In the image above, the blue self driving car (bottom left) is trying to get to the goal (gold sta ...
- machine learning(11) -- classification: advanced optimization 去求cost function最小值的方法
其它的比gradient descent快, 在某些场合得到广泛应用的求cost function的最小值的方法 when have a large machine learning problem, ...
- behavior planning——10 behaior planning pseudocode
One way to implement a transition function is by generating rough trajectories for each accessible & ...
- loss function与cost function
实际上,代价函数(cost function)和损失函数(loss function 亦称为 error function)是同义的.它们都是事先定义一个假设函数(hypothesis),通过训练集由 ...
- 【caffe】loss function、cost function和error
@tags: caffe 机器学习 在机器学习(暂时限定有监督学习)中,常见的算法大都可以划分为两个部分来理解它 一个是它的Hypothesis function,也就是你用一个函数f,来拟合任意一个 ...
- 逻辑回归损失函数(cost function)
逻辑回归模型预估的是样本属于某个分类的概率,其损失函数(Cost Function)可以像线型回归那样,以均方差来表示:也可以用对数.概率等方法.损失函数本质上是衡量”模型预估值“到“实际值”的距离, ...
随机推荐
- MySQL数据库起步 linux安装(更新中...)
卸载mysql! [root@localhost usr]# yum remove mysql mysql-server mysql-libs compat-mysql51 [root@localho ...
- 计蒜客 Flashing Fluorescents(状压DP)
You have nn lights, each with its own button, in a line. Pressing a light’s button will toggle that ...
- Javascript-随滚轮匀速滑动的浮动广告窗动画
<!DOCTYPE html> <html lang="en" xmlns="http://www.w3.org/1999/xhtml"> ...
- QT生成GUID
#include <QCoreApplication> #include <QUuid> #include <QDebug> int main(int argc, ...
- BP神经网络分类应用
DNA序列分类 作为研究DNA序列结构的尝试,提出以下对序列集合进行分类的问题:有20个已知类别的人工制造序列,其中序列标号1-10为A类,11-20为B类.请从中提取特征,构造分类方法,并用这些已 ...
- vue 微信内H5调起支付
在微信内H5调起微信支付,主要依赖于一个微信的内置对象WeixinJSBridge,这个对象在其他浏览器中无效. 主要代码: import axios from 'axios'; export def ...
- c标签 if else c标签 总结
[b]STL标签用法 关键字:JSTL标签.<c:choose>.<c:forEach>.<c:forTokens>.<c:if>.<c:impo ...
- [java]反射1 2017-06-25 21:50 79人阅读 评论(10) 收藏
很多东西的实现基础,都是反射,spring的AOP,动态代理等等,下面咱们来学习一下Java的反射 什么是反射? JAVA反射机制是在运行状态中,对于任意一个类,都能够知道这个类的所有属性和方法:对于 ...
- 想要快速完成一个Python项目,离不开这些开源库
链接:https://opensource.com/article/18/9/python-libraries-side-projects 在Python / Django世界中有一句话:我们为语言而 ...
- day39-Spring 16-Spring的JDBC模板:设置参数到属性文件
<?xml version="1.0" encoding="UTF-8"?> <!-- 引入beans的头 --> <beans ...