stm32控制步进电机加减速
实习公司项目需要控制步进电机,电机方面主要包括控制运动、加减速、限位。下面介绍一下在电机控制方面的心得,由于对于电机的控制不需要很精确,并且自身能力有限,相比于大牛有很大的差距。
1.需要实现的功能
主要是控制滑块的运动,开始运动时需要加速,当稳定在最高速度时匀速运动,检测到下端限位信号时,开始减速直到停止,然后进行反向加速,匀速,检测到上端限位时停止运动。
加速——匀速——减速——停止——反向——加速——匀速——停止
2.硬件部分
本次电机为两相四线步进电机,两相:电机有两个线圈(绕组),四线:电机有四根线,一般是A+ A- B+ B-。有些电机不会标注出线的极性,其实可以用万用表测,短接的就是同一个绕组,或者短接之后电机转动很费力,也代表是同一个绕组。
- 驱动
电机的运动需要较大的电流,这取决于电机本身和负载,所以通常需要驱动芯片。而且驱动芯片可以实现许多附加的功能,包括细分、休眠、保护等。本次采用的是DRV8825驱动芯片模块。模块的介绍图如图所示:
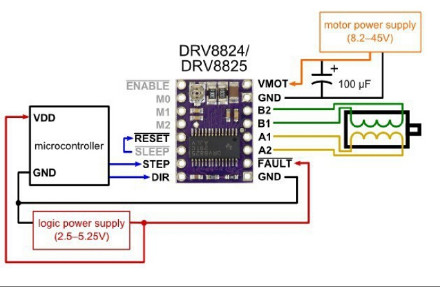
引脚介绍:
1.ENABLE/:使能引脚,高电平停止工作,低电平正常工作;
2.M0-M2:代表细分,最大可以达到32细分,这部分可以参考datasheet;
3.RESET/ 、SLEEP/:低电平会休眠和复位,因此电机正常工作时,两个引脚接高电平;
4.STEP:最重要的引脚,通过单片机给这个引脚PWM信号,控制电机运动;
5.DIR:0和1控制电机方向;
6.VMOT:供电引脚,一般用12-20V就可以了;
7.B2-A1:接电机四根线;
8.FAULT/:接高电平工作;
- 光电限位
光电限位采用的反射型,型号为sy1200,感应距离为1-4mm,当没有遮挡时,输出低电平;有遮挡时,代表有光反射回来,输出高电平;测试过程中,发现最好采用白色的平面反射,效果更好。
3.软件部分
软件主要就是通过stm32输出PWM脉冲,脉冲的频率决定了电机的速度。
PWM通过定时器产生,决定频率的主要是arr重装载值,以及psc预分频值。最终输出的PWM频率为72000k/(arr*psc)。
- 加减速
由于需要做到加减速,也就意味着PWM的频率是改变的,因此arr的值需要改变。参考网上对于加减速的一些方法:主要有T型加减速和S型加减速,实现方法有公式法或者查表法。由于公式法比较麻烦,就直接采用了查表法。所以根据需要的频率,计算出不同频率下的arr值,写到数组里,就可以实现频率的改变。不过这种方法下,频率的改变是根据时间做线性或者S型变化,这种方法对吗?还是根据步数来改变?
S型加减速:
T型加速就是匀加速,固定加速度。S型加速需要根据公式计算,详细说明如下:

其中Fcurrent代表某个点的频率:Fmin代表最小频率;Fmax代表最大频率;Flexible为S曲线区间系数,越大代表压缩的最厉害,中间(x坐标0点周围)加速度越大;越小越接近匀加速。理想的S曲线的取值为4-6;num:频率点/2;
例如想要从1kHz加速到40kHz,中间经过40个点,Fmin=1kHz,Fmax=40kHz,num=40/2=20,最后通过excel计算出各个频率值,可以发现在末端的加速是非常缓慢的,中间加速比较大。问题就是,初始速度并不是1khz了,他取决于系数的取值,取6时,初始速度就越小。
软件中实现:
采用定时器3输出PWM脉冲,定时器2用于计数中断(更精确的控制可以通过定时器2来计算出给出多少个脉冲,也就是电机运动的步数,那样的话就可以精确控制电机运动,形成开环反馈)
// 加减速实现部分
void TIM2_IRQHandler(void) //
{ if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) //
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // time++;
if(time>=35)//
{ time=0; //每x个周期进入定时后,对time进行清零,然后重新进行累加 if(jiasu==1) //加速状态
{
n=n+1;
fre=freq[n]; } if(jiasu==0) //减速状态,检测到下端的限位后进行减速,此时的n应该等于加速之后的最大值,也就是频率最大的时候,接下来进行递减,速度降低
{
n=n-1;
fre=freq[n]; } if(n>=38)//
{
n=38; }
if(n<=0) //根据前面速度递减,当减到第一个数时,速度已经降到了1k,可以让电机开始停止然后转向
{ GPIO_SetBits(GPIOC,GPIO_Pin_6); // 拉高步进电机的enable,停止运动 DIR0=!DIR0; //转向
delay_ms(100);
n=0;
fre=freq[n];
jiasu=1;
GPIO_ResetBits(GPIOC,GPIO_Pin_6); // 转向之后拉低电机的enable,开始运动 }
TIM3_PWM_Init(fre,9);
TIM_SetCompare4(TIM3,fre/2);// 改变TIM3的输出频率,从而改变电机的速度
}
}
}
stm32控制步进电机加减速的更多相关文章
- STM32 控制步进电机 28BYJ-48
STM32 控制步进电机 28BYJ-48 http://blog.chinaunix.net/uid-12664992-id-300272.html 步进电机驱动最简化的逻辑: //四相八拍:A- ...
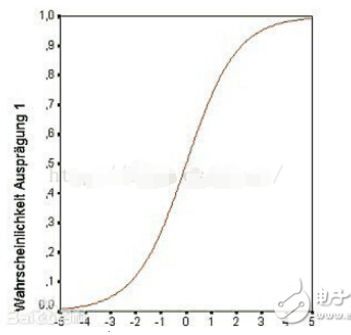
- 步进电机加减速S曲线算法
一.Sigmoid 函数 1.1 Sigmoid函数原型 1.2 sigmoid函数波形: 由图形可看出在-10时已经接近于0,一般取值区间在[-5,5]. 1.3 sigmoid函数的导数 转载CS ...
- STM32串口控制步进电机(原创)
用的42步进电机: 厂家可能不一样,两项四线步进电机,里面有两个线圈.在电机什么电都没有接的情况下,用万用表测量四个管脚:两两短接(或者阻值很小)的为一组,可以分别接A+,a-剩余接B+,B-;顺序可 ...
- 使用STM32控制TMC5160驱动步进电机
首先先来了解一下TMC5160的3种工作模式 TMC5160通过两个引脚来控制它的工作模式:SD_MODE和SPI_MODE. 1.当SD_MODE接地,SPI_MODE拉高,TMC5160即工作在模 ...
- 用STM32定时器中断产生PWM控制步进电机
控制步进电机可以使用PWM.定时器中断.延时,这里用的就是定时器中断来让它转动. 一.硬件部分1.使用的硬件板子用的是正点原子的STM32F103 mini板,驱动器是DM420(DM420驱动器资料 ...
- STM32控制永磁同步电机 | FOC电机控制算法概述
1. FOC基本概念 参考:https://www.sohu.com/a/432103720_120929980 FOC(field-oriented control)为磁场导向控制,又称为矢量控制( ...
- Spring使用环境变量控制配置文件加载
项目中需要用到很多配置文件,不同环境的配置文件是不一样的,因此如果只用一个配置文件,势必会造成配置文件混乱,这里提供一种利用环境变量控制配置文件加载的方法,如下: 一.配置环境变量 如果是window ...
- Spring使用环境变量控制配置文件加载(转)
项目中需要用到很多配置文件,不同环境的配置文件是不一样的,因此如果只用一个配置文件,势必会造成配置文件混乱,这里提供一种利用环境变量控制配置文件加载的方法,如下: 一.配置环境变量 如果是window ...
- MPU6050工作原理及STM32控制MPU6050
源:MPU6050工作原理及STM32控制MPU6050 MPU6050 介绍
随机推荐
- python+selenium自动化禅道登录测试
本文以禅道登录测试为例,思路主要分openBrowser.openUrl.findElement.sendVals.checkResult.ReadUserdate六部分 openBrowser de ...
- Vue组件中的Data为什么是函数。
简单点说,组件是要复用的,在很多地方都会调用. 如果data不是函数,而是属性,就又可能会发生多个地方的相同组件操作同一个Data属性,导致数据混乱. 而如果是函数,因为组件data函数的返回值是 ...
- 关于“教室派”APP的使用报告和相关建议
教室派APP能够很好的解决学生查询各教室占用情况这一问题,使用起来非常方便.用户可根据需要选取星期来查询不同教学楼教室使用情况. 编辑课表是其附带功能,但通过使用发现手动编辑课表效率太低,建议开发者加 ...
- JavaDay1(下)
Java learning_Day1(上) 正式开始JavaSE的基础学习 本人学习视频用的是马士兵的,也在这里献上 <链接:https://pan.baidu.com/s/1qKNGJNh0G ...
- jdk8-》reduce操作
什么是reduce操作 聚合操作,中⽂意思是 “减少” 根据⼀定的规则将Stream中的元素进⾏计算后返回⼀个唯⼀的值 常⽤⽅法⼀: Optional<T> reduce(BinaryOp ...
- 网易云信Duilib开发实践和Windows应用界面开发框架源码开源介绍
序言 Duilib介绍 Duilib是windows平台下的一款轻量级directUI开源库(遵循BSD协议),完全免费,可用于商业软件开发,只需在软件包里附上协议文件即可.Duilib可以简单方便地 ...
- 组合数取mod
组合数取mod 条件mod是质数,inv 是逆元,fac是阶层: 用于n在10^5左右 maxn=100505: ll fact[maxn],inv[maxn]; ll Pow(ll x,ll n){ ...
- WPF学习笔记四之命令
1.概念 对于程序来说,命令就是一个个任务,例如保存,复制,剪切这些操作都可以理解为一个个命令.即当我们点击一个复杂按钮时,此时就相当于发出了一个复制的命令,即告诉文本框执行一个复杂选中内容的操作,然 ...
- leetcode 925. Long Pressed Name
判定是否长按 var isLongPressedName = function (name, typed) { var i = 1, j = 0, n = name.length, m = typed ...
- MySQL关于GTID的一些功能限制
参考文献:https://www.cnblogs.com/luckcs/articles/6295992.html 更新非事务引擎: Case重现: master:对一个innodb表做一个多sql更 ...