基于Opencv的自适应中值滤波函数selfAdaptiveMedianBlur()
7.3.3 自适应滤波器
自适应中值滤波器
对于7.3.2节所讨论的中值滤波器,只要脉冲噪声的空间密度不大,性能还是可以的(根据经验需Pa和Pb小于0.2)。本节将证明,自适应中值滤波器可以处理更大概率的脉冲噪声。自适应中值滤波器的另一个优点是平滑非脉冲噪声时,试图保留细节,这是传统中值滤波器所做不到的。正如前面几节中所讨论的所有滤波器一样,自适应中值滤波器也工作于矩形窗口区域Sxy内。然而,与这些滤波器不同的是自适应中值滤波器在进行滤波处理时,会根据本节列举的某些条件而改变(增大或缩小)Sxy的尺寸。记住,滤波器的输出是一个单值,该值用于替代点(x,y)处的像素值,位于(x,y)处的点是Sxy的中心也是它的锚点。
考虑如下符号:
Zmin=Sxy中的最小灰度值;
Zmax=Sxy中的最大灰度值;
Zmed=Sxy中的中值;
Zxy=坐标(x,y)处的灰度值;
Smax=Sxy所允许的最大尺寸(在程序中,用kernal_size表示);
自适应中值滤波算法以两个进程工作,分别为进程A和B,如下所示:
进程A:
如果Zmin<Zmed<Zmax,则转到进程B
否则增大窗口尺寸;
增大后的窗口尺寸(程序中用ks表示),
如果ks<Smax,则重复A。(在程序中,kernal_size即Smax)
否则输出Zmed
进程B:
如果Zmin<Zxy<Zmax,则输出Zxy
否则,输出Zmed.
该算法的设计意图是要实现3个目的:①去除椒盐噪声;②平滑其它非脉冲噪声;③减少物体边界细化或粗化的失真。Zmin和Zmax和在算法统计上,认为是类脉冲噪声分量,既使它们不是图像中的最大值或最小值。
进程A的目的是确定中值滤波器的输出Zmed,是否是一个脉冲(黑或白)。如果条件Zmin<Zmed<Zmax有效,则根据前节提到的原因,Zmed不可能是脉冲。这种情况下,转到进程B,检验窗口Sxy的中心点Zxy(即锚点)是否是一个脉冲。如果满足条件,就不是脉冲,原因与前同。这时,算法输出一个未修改的像素值Zxy。通过不修改这些“中间灰度级”的点,减少图像中的失真。如果Zmin<Zxy<Zmax为假,则Zxy=Zmin或Zxy=Zmax。在任何一种情况下,像素值都是一个极端值,且算法输出中值Zmed,从进程A可知Zmed不是脉冲噪声。最后一步是执行标准的中值滤波。问题是,标准中值滤波器使用图像中相应邻域的中值代替图像中的每一点,这会引起不必要的细节损失。
继续上面的说明,假设进程A确实找到了一个脉冲(若不是,则转到进程B),算法会增大窗口尺寸,并重复进程A。该循环会一直继续,直到算法找到一个非脉冲的中值,并转到进程B。如果循环中窗口达到了最大尺寸,则算法会返回值Zmed。注意,这并不能保证该值不是脉冲。噪声的概率Pa或Pb越小,或者在Sxy允许的范围内越大,退出条件也就越难满足。这是合理的,随着脉冲密度的增大,我们会需要更大的窗口来消除尖峰噪声。
算法没输出一个值,窗口Sxy就被移动到图像中的下一个位置。然后,算法重新初始化并应用到新位置的像素。仅使用新像素就可以反复更新中值,因而减少了计算开销。
#include <iostream>
#include <opencv2/opencv.hpp>
#include <vector>
#include <algorithm>
using namespace cv;
using namespace std;
//下面的宏,定义了在矩阵src的第m行、n列,ks*ks覆盖的矩形区域内的像素,并将像素压到矢量v中
//该覆盖区域的左上角坐标为(m,n),宽为ks,高为ks,要求src必须是单通道,数据类型为CV_8UC1
#define CV_ROI_ELEM(src,vector,m,n,ks) \
{ \
uchar* kn; \
int st0=src.step[];\
int st1=src.step[];\
for(int k=;k<(ks);k++) \
{ \
for(int s=;s<(ks);s++) \
{ \
kn =src.data+(k+m)*st0+(s+n)*st1; \
vector.push_back(*kn); \
} \
} \
} #define CV_MAT_ELEM2(src,dtype,y,x) \
(dtype*)(src.data+src.step[]*(y)+src.step[]*(x))
/*********************自适应中值滤波********************************/
void selfAdaptiveMedianBlur(Mat&src,Mat&dst,int kernal_size)
{
CV_Assert(src.type()==CV_8UC1||src.type()==CV_8U);
if(dst.empty())
{
dst.create(src.rows,src.cols,CV_8UC1);
}
uchar* pdst=dst.data;
uchar Zmin,Zmax,Zmed,Zxy;
int step0=src.step[];
int step1=src.step[];
for(int i=kernal_size/;i<src.rows-kernal_size/;i++)
{
for(int j=kernal_size/;j<src.cols-kernal_size/;j++)
{
int ks=;//kernal_size;
int count=;
Zxy=*CV_MAT_ELEM2(src,uchar,i,j);//Sxy覆盖区域的中心点像素值,即锚点像素值
vector<uchar> v;//将模板覆盖区域的像素,压入矢量v中
do{
if(cout==)
{//获取模板ks*ks覆盖区域的像素,压入矢量v中
CV_ROI_ELEM(src,v,i-ks/,j-ks/,ks);
}
else
{
/****************下面的for循环,将外扩的四个边的像素添加到v中**************/
uchar* p=src.data+(i-ks/)*step0+(j-ks/)*step1;
for(int u=;u<ks;u++)
{
v.push_back(*(p+u*step1));//向外扩展的四个边的上边
v.push_back(*(p+(ks-)*step0+u*step1));//向外扩展的四个边的下边
if(u!=&&u!=ks-)
{
v.push_back( *(p+u*step0));//向外扩展的四个边的左边
v.push_back(*(p+u*step0+(ks-)*step1));//向外扩展的四个边的右边
}
}
} //对v的元素排序
//排序后,Sxy覆盖区域内,最大值为Zmax=v[v.size-1],最小值为Zmin=v[0]
std::sort(v.begin(),v.end());
Zmin=v[],Zmax=v[v.size()-],Zmed=v[ks*ks/];
pdst =CV_MAT_ELEM2(dst,uchar,i,j);
if(Zmin<Zmed&&Zmed<Zmax)
{
if(Zmin<Zxy&&Zxy<Zmax)
{*pdst=Zxy;break;}
else
{*pdst=Zmed;break;}
}
else
{
ks +=;
}
count++;
}while(ks<=kernal_size); *pdst=Zmed;
}
}
} int main()
{
Mat src=imread("D:\\Qt\\MyImage\\3.bmp",);
imshow("src image",src); Mat dst;
selfAdaptiveMedianBlur(src,dst,); imshow("adaptive median filter",dst); waitKey(); return ;
}
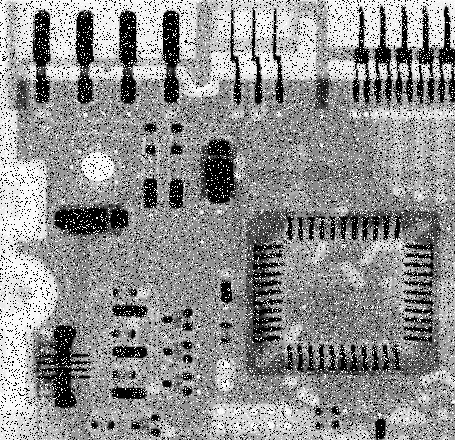
原图像:
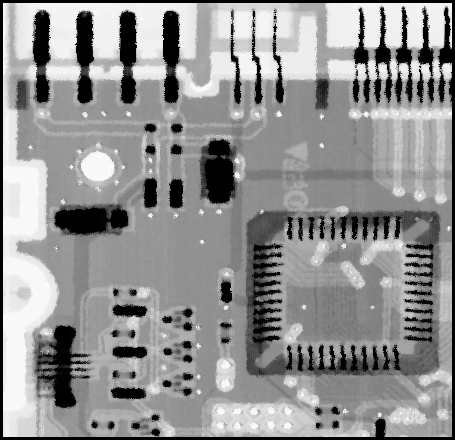
自适应中值滤波后的图像:
基于Opencv的自适应中值滤波函数selfAdaptiveMedianBlur()的更多相关文章
- opencv-11-中值滤波及自适应中值滤波
开始之前 在上一篇我们实现了读取噪声图像, 然后 进行三种形式的均值滤波得到结果, 由于我们自己写的均值滤波未作边缘处理, 所以效果有一定的下降, 但是总体来说, 我们得到的结果能够说明我们的算法执行 ...
- 基于记忆性的中值滤波O(r)与O(1)复杂度的算法实现
本文参考博客:https://www.cnblogs.com/Imageshop/archive/2013/04/26/3045672.html 原生的中值滤波是基于排序算法的,这样的算法复杂度基本在 ...
- verilog实现中值滤波
前言 项目需要,想要实现算法中的其中一步即中值滤波,同时,因为图像处理部分中值滤波相对来说还是比较简单的,将中值滤波的硬件实现作为进入FPGA领域的第一次尝试.虽然说网上有较多关于中值滤波的文档,可是 ...
- OpenCV计算机视觉学习(4)——图像平滑处理(均值滤波,高斯滤波,中值滤波,双边滤波)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice &q ...
- Win8Metro(C#)数字图像处理--2.10图像中值滤波
原文:Win8Metro(C#)数字图像处理--2.10图像中值滤波 [函数名称] 图像中值滤波函数MedianFilterProcess(WriteableBitmap src) [函数代码] ...
- 基于MATLAB的中值滤波算法实现
在实时图像采集中,不可避免的会引入噪声,尤其是干扰噪声和椒盐噪声,噪声的存在严重影响边缘检测的效果,中值滤波是一种基于排序统计理论的非线性平滑计数,能有效平滑噪声,且能有效保护图像的边缘信息,所以被广 ...
- opencv —— boxFilter、blur、GaussianBlur、medianBlur、bilateralFilter 线性滤波(方框滤波、均值滤波、高斯滤波)与非线性滤波(中值滤波、双边滤波)
图像滤波,指在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制,是图像与处理中不可缺少的操作. 邻域算子,指利用给定像素及其周围的像素值,决定此像素的最终输出值的一种算子.线性邻域滤波器就是一种常 ...
- [学习opencv]高斯、中值、均值、双边滤波
http://www.cnblogs.com/tiandsp/archive/2013/04/20/3031862.html [学习opencv]高斯.中值.均值.双边滤波 四种经典滤波算法,在ope ...
- 基于FPGA的中值滤波算法实现
在这一篇开篇之前,我需要解决一个问题,上一篇我们实现了基于FPGA的均值滤波算法的实现,最后的显示效果图上发现有一些黑白色的斑点,我以为是椒盐噪声,然后在做基于FPGA的中值滤波算法的实验时,我发现黑 ...
随机推荐
- @InitBinder的作用
由@InitBinder表示的方法,可以对WebDataBinder对象进行初始化.WebDataBinder是DataBinder的子类,用于完成由表单到JavaBean属性的绑定. @InitBi ...
- Django + celery +redis使用
1.安装包 pip install celery pip install django-celery pip install pymysql 2.创建一个django项目 - proj/ - proj ...
- python file对象测试数据的读写操作及OS模块介绍(四)
import from....import 引入模块 引入类 ①import 如果文件在lib下而且是python模块 :import 模块名. ②from....import from 包名.包 ...
- POJ1185炮兵阵地(DP状态压缩)
问题描述 司令部的将军们打算在N*M的网格地图上部署他们的炮兵部队.一个N*M的地图由N行M列组成,地图的每一格可能是山地(用"H" 表示),也可能是平原(用"P&quo ...
- Springboot项目全局异常统一处理
转自https://blog.csdn.net/hao_kkkkk/article/details/80538955 最近在做项目时需要对异常进行全局统一处理,主要是一些分类入库以及记录日志等,因为项 ...
- qt5-信号和槽
信号函数: connect(btn,&QPushButton::clicked,this,&QWidget::close); //参数1 信号发送者://参数2 信号:---& ...
- Mybatis-Plus的BaseMapper的用法
1.如何使用BaseMapper进行数据库的操作. 2.使用BaseMapper进行插入实体时如何让UUID的主键自动生成. Student实体类,其中id属性主键为UUID package com. ...
- JAVA学长
https://www.cnblogs.com/chenmingjun/p/9697371.html
- POJ 1995(有关快速幂运算的一道水题)
Raising Modulo Numbers Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 9745 Accepted: ...
- 游戏2048的python实现
前些日子被问了一下2048是如何实现,说实话当时没有想的特别清晰,所以回答的也比较混乱,后来仔细想想这个问题还是挺有趣的,简单的实现了一下 这个问题里面主要有两个问题,一个是移动时的计算,二是移动前对 ...