Environment Perception: 3D Truss Environment Mapping and Parametric Expression Extraction
Experiments
Preparation
roscorerosrun pcl_ros pcd_to_pointcloud ~/.ros/wh2_lg707070_1ms0.01_filtered.pcd _frame_id:=/map
In the directory of ~/truss_ws/src/truss
rviz -d node_pole.rviz
In another terminal, open rviz -> Panels -> Selection. Choose Select, then left click the point whose position you want to know. On the **left Selection ** you can see it.
The point on the pole it's position is:
// X Y Z0.2518590.0151518-0.0633736
Modify values of RES and init_x, init_y and init_z of the truss_pointcloud.cpp and skeleton_truss.cpp in the directory of /home/william/truss_ws/src/truss/src
In truss_pointcloud.cpp, it seems like:
#define RES 100 //occmap resulotion, number of cell per meter(one demention)
init_x=0.251859;init_y=-0.251859;init_z=-0.251859;
In skeleton_truss.cpp, it seems like:
#define RES 100 //occmap resulotion, number of cell per meter(one demention)
float init_x=0.251859,init_y=-0.251859,init_z=-0.251859; // must be in the truss
Successful demo
init_x=0.12;init_y=0.12;init_z=0.526;
Run node truss_pointcloud.
rosrun truss truss_pointcloud
Publish pointcloud
rosrun pcl_ros pcd_to_pointcloud /home/william/Documents/demos/cylinders/preprocessing/data/realSense02.pcd 10 _frame_id:=/map
output:
size 92 80 122[ INFO] [1555152658.163952435]: n=137,DETECT_time=0,tot=10.46[ INFO] [1555152658.235489374]: n=350,DETECT_time=1,tot=11.89[ INFO] [1555152658.365974220]: n=734,DETECT_time=2,tot=15.27[ INFO] [1555152658.451850002]: n=991,DETECT_time=3,tot=15.29[ INFO] [1555152658.854427484]: n=2179,DETECT_time=4,tot=12.83[ INFO] [1555152659.265372521]: n=3354,DETECT_time=5,tot=12.42[ INFO] [1555152659.665302454]: n=4504,DETECT_time=6,tot=26.82[ INFO] [1555152660.201265043]: n=6039,DETECT_time=7,tot=10.18[ INFO] [1555152660.736159441]: collect time=678,rollback time=178[ INFO] [1555152660.738436210]: Finish
Run node skeleton_truss
rosrun truss skeleton_truss
output:
[ INFO] [1555153870.996387804]: Skeleton start[ INFO] [1555153911.036309147]: collect time=20[ INFO] [1555153911.036339322]: Skeleton finish
Run node node_pole
rosrun truss node_pole
Output:
vector[1].x=0.02,y=0.12,z=0.00,size of vector[3]=77vector[2].x=0.00,y=0.08,z=-0.04,size of vector[4]=26vector[3].x=-0.02,y=0.00,z=0.00,size of vector[6]=97vector[4].x=0.00,y=-0.02,z=0.02,size of vector[17]=30vector[5].x=0.00,y=0.00,z=-0.02,size of vector[19]=46vector[6].x=-0.04,y=0.02,z=0.00,size of vector[29]=24vector[7].x=0.04,y=-0.04,z=0.00,size of vector[73]=24[ INFO] [1555153941.073078888]: Type of vector=7[ INFO] [1555153941.073190788]: Number of original pole=39[ INFO] [1555153941.073590573]: Number of true poleos=8[ INFO] [1555153941.826587964]: Pole 0: radius=0.07;end1.x=0.12,end1.y=-0.29,end1.z=0.64;end2.x=-0.09,end2.y=0.09,end2.z=0.68[ INFO] [1555153941.826616263]: polenumber=2
Then Fixd Frame select map, see topic /pcl_node in rviz
Question:
- Does the position of the point on the pole will be affected whether it is near the background?
- Valify it by choosing another point it is not near by the background.
observe the scenario, noise exist near the pole, maybe should tune down the search distance.
modify truss_pointcloud.cpp line 354, init_x, init_y, init_z
save settings of rviz in node_pole.
rviz -d node_pole
In order to run node truss pointCloud once, we will run it at first. Then publish pointcloud only one time.
Update in 20190528
Tune down the values of RANGE and ADDLI when the truss is nearer to the background.
#define DIS 8 //Fisrt filtering#define RES 100 //occmap resulotion, number of cell per meter(one demention)// #define RES 500 //occmap resulotion, number of cell per meter(one demention)#define SDEP 200 //depth of search, size of close list#define RANGE 5 //range of initial search, rely on the resulotion of pointcloud#define ADDLI 3 //limit of additional search range, rely on the Climbot max#define ERROR 2 //allowable error#define POSTEP 3000 //max step of search.#define LOCALDIS 0.1 //distance for identify the local optima seperately#define ALLOWDUP 2 //when fall into local optima, times to duplicate and escape#define COLLECT 3000 //Sample time#define DESCRITH 10
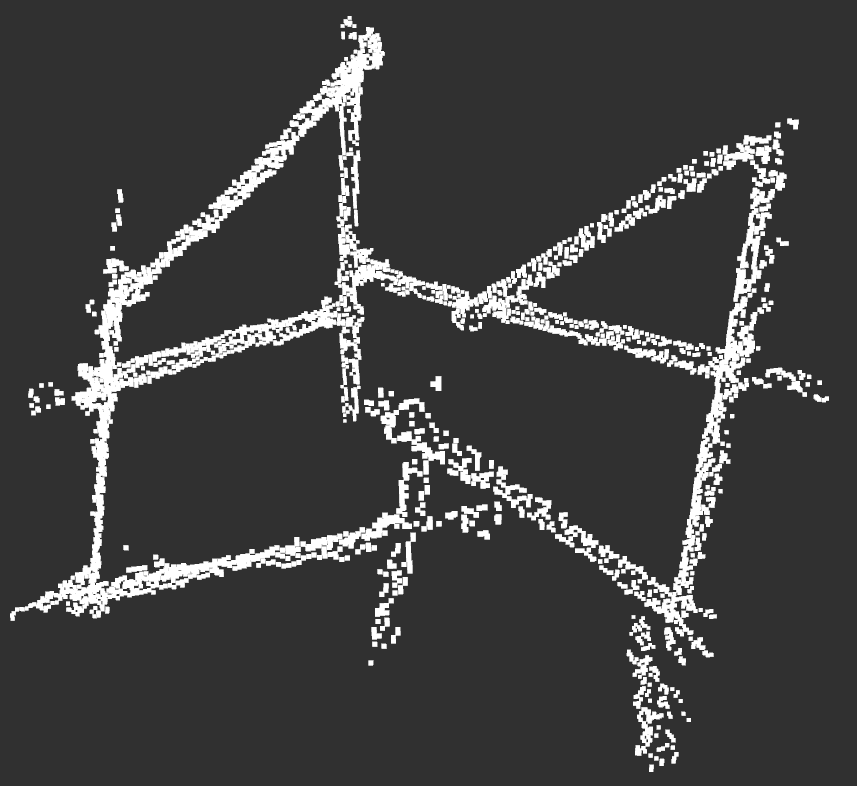
The original pointcloud:

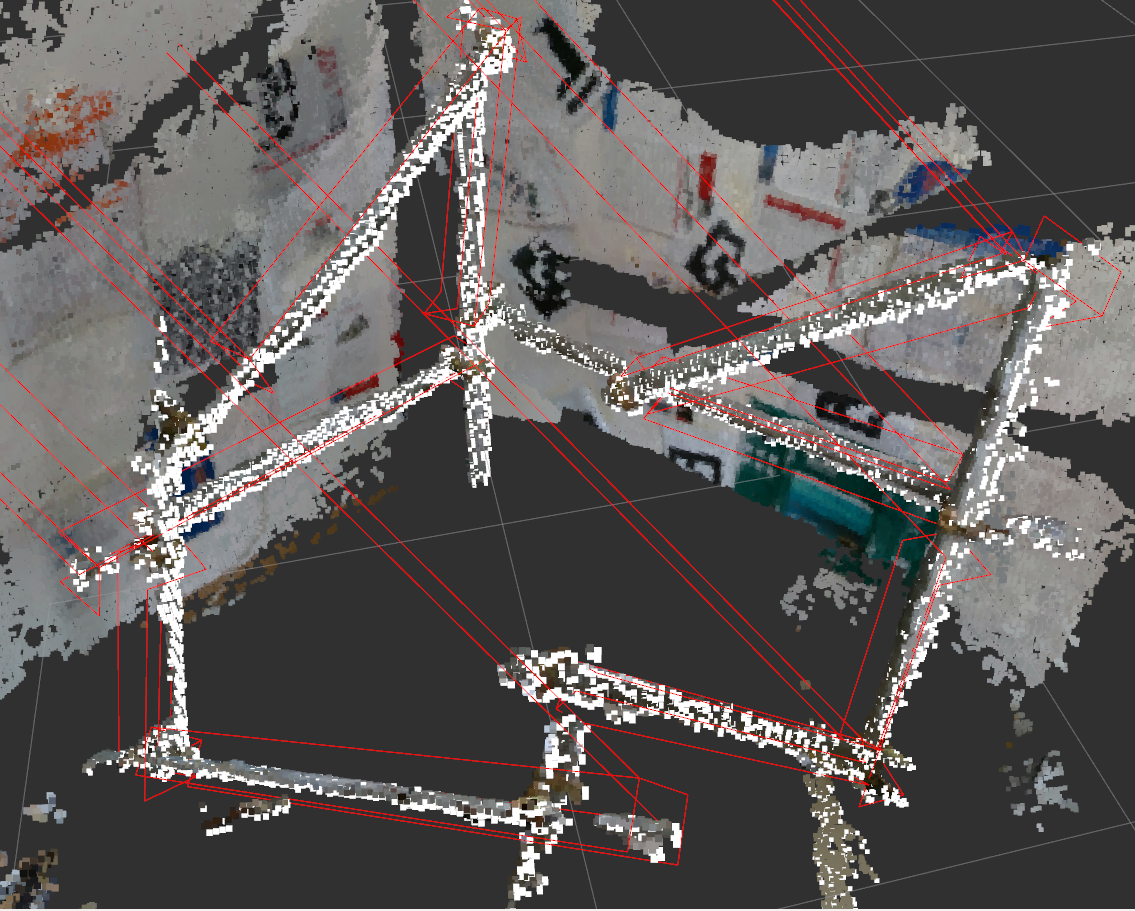
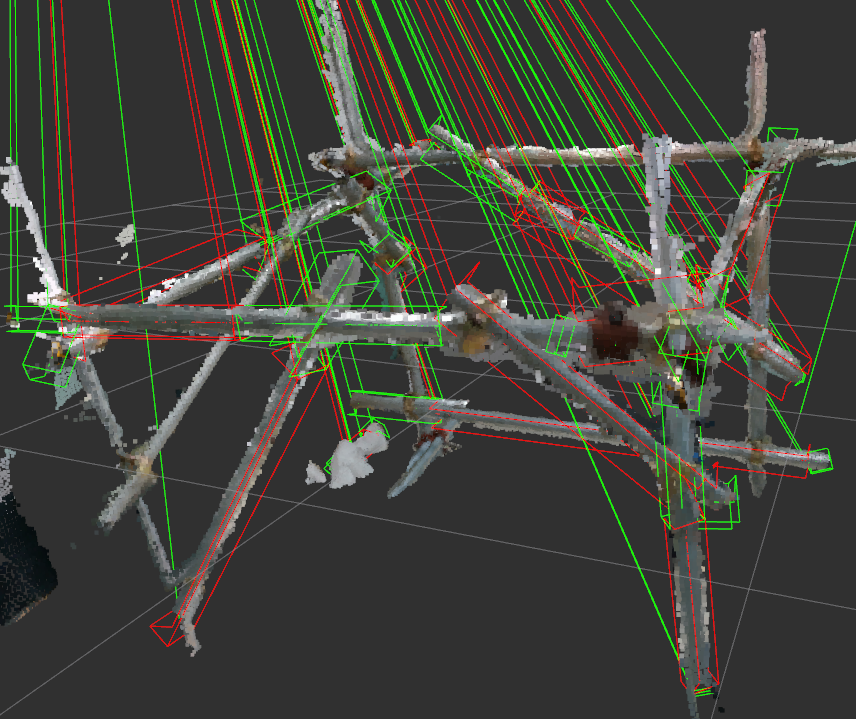
Picture after truss_pointcloud
#define RES 100 //occmap resulotion, number of cell per meter(one demention)#define SDEP 100 //depth of search, size of close list#define RANGE 6 //range of initial search, rely on the max step length of Climbot#define ADDLI 4 //limit of additional search range, to increace the search range when needed#define ERROR 8 //allowable error, cell#define POSTEP 300 //max step of forward search.#define OPDIR 100 //max step of leaving search.#define LOCALDIS 0.1 //distance for identify the local optima seperately#define ALLOWDUP 2 //when fall into local optima, times to duplicate and escape

#define SAMPLE_TH 10 //vector size threshold 24#define ANGLE 27 //vector angle range 27#define POLE_LENGTH 4 //pole length threshold#define POLE_DIS 0.5 //repeated poles check distance#define SHOW_POLE 99 //99 means all the true poles, 999 means all the poles#define OBB_SIZE 0.08 //the size of expand ball from one point#define PP_SKIP 4 //the allowed breakup of pointcloud along one pole

[ INFO] [1559107770.253840402]: Pole 1: radius=0.08;end1.x=-0.65,end1.y=-0.69,end1.z=-0.31;end2.x=-0.58,end2.y=-0.75,end2.z=0.34[ INFO] [1559107770.253870503]: Pole 5: radius=0.08;end1.x=0.33,end1.y=0.02,end1.z=0.39;end2.x=0.40,end2.y=-0.09,end2.z=1.02[ INFO] [1559107770.253906031]: Pole 12: radius=0.08;end1.x=-0.35,end1.y=0.77,end1.z=-0.14;end2.x=-1.03,end2.y=-0.06,end2.z=0.49[ INFO] [1559107770.253920717]: Pole 15: radius=0.08;end1.x=0.37,end1.y=0.01,end1.z=0.18;end2.x=-0.32,end2.y=0.78,end2.z=0.43[ INFO] [1559107770.253934686]: Pole 17: radius=0.07;end1.x=0.40,end1.y=-0.13,end1.z=0.98;end2.x=-0.18,end2.y=0.44,end2.z=0.71[ INFO] [1559107770.253947612]: Pole 18: radius=0.05;end1.x=-0.81,end1.y=0.01,end1.z=0.51;end2.x=-0.69,end2.y=-0.64,end2.z=-0.16[ INFO] [1559107770.253957812]: Pole 19: radius=0.06;end1.x=0.00,end1.y=-0.32,end1.z=0.36;end2.x=-0.47,end2.y=-0.80,end2.z=0.91[ INFO] [1559107770.253969030]: Pole 20: radius=0.08;end1.x=-0.35,end1.y=0.77,end1.z=-0.14;end2.x=-1.03,end2.y=-0.06,end2.z=0.49[ INFO] [1559107770.253980318]: Pole 21: radius=0.08;end1.x=-0.33,end1.y=0.82,end1.z=-0.21;end2.x=-0.26,end2.y=0.66,end2.z=0.35[ INFO] [1559107770.253996517]: Pole 22: radius=0.07;end1.x=-0.00,end1.y=-0.35,end1.z=0.35;end2.x=-0.47,end2.y=-0.80,end2.z=0.40[ INFO] [1559107770.254006475]: Pole 23: radius=0.08;end1.x=-0.53,end1.y=-0.87,end1.z=0.87;end2.x=-0.47,end2.y=-0.75,end2.z=0.96[ INFO] [1559107770.254018620]: polenumber=11
Publish topics
/allpath/allpath2/cube/detectpoints/envelopeline/ldetectpoints/openvelopeline/output2_pcl/pcl_node
truss_pointcloud
/allpath/output2_pcl
skeleton_truss
/allpath2
node_pole
/envelopeline/openvelopeline/pcl_node
Updated in 190731

Updated in 190805
Environment Perception: 3D Truss Environment Mapping and Parametric Expression Extraction的更多相关文章
- 3个人一起写的EI论文可以检索到啦~ --> Exploring the use of a 3D Virtual Environment in Chinese Cultural Transmission
<a href='http://www.engineeringvillage.com/blog/document.url?mid=cpx_10ed754f14b5b7381b6M764b1017 ...
- 浩哥解析MyBatis源码(二)——Environment环境
原创作品,可以转载,但是请标注出处地址:http://www.cnblogs.com/V1haoge/p/6625612.html 本应该先开始说Configuration配置类的,但是这个类有点过于 ...
- MyBatis源码解析(二)——Environment环境
原创作品,可以转载,但是请标注出处地址:http://www.cnblogs.com/V1haoge/p/6625612.html 本应该先开始说Configuration配置类的,但是这个类有点过于 ...
- Environment中针对的读写权限判断
Android应用开发中,常使用Environment类去获取外部存储目录,在访问外部存储之前一定要先判断外部存储是否已经是可使用(已挂载&可使用)状态,并且需要在AndroidManifes ...
- Environment 类
提供有关当前环境和平台的信息以及操作它们的方法. 此类不能被继承. using System; using System.Collections; using System.Collections.G ...
- MyBatis(3.2.3) - Configuring MyBatis using XML, Environment
The key component of MyBatis is SqlSessionFactory from which we get SqlSession and execute the mappe ...
- Flask 框架下 Jinja2 模板引擎高层 API 类——Environment
Environment 类版本: 本文所描述的 Environment 类对应于 Jinja2-2.7 版本. Environment 类功能: Environment 是 Jinja2 中的一个 ...
- 016专家视图测试脚本开发- Environment对象的使用;Msgbox和Print的区别
(1)读取Built-in 'file -> settings -> Enrionment -> variable type 为 Built-in os = Environment. ...
- 类库探源——System.Environment
Environment 类: 提供有关当前环境和平台的信息以及操作它们的方法.此类不能被继承. 命名空间: System 程序集: mscorlib.dll 继承关系: 常用属性(字段)和方法: ...
随机推荐
- JSP的一个增删改查例子和总结
总结的几点: 1.在jsp中注意<%! %>声明代码块中的变量只会在项目开始的时候第一次运行jsp的时候执行一遍,有点类似于java类中的static代码块,所以如果是会改变的值不应该声明 ...
- QWidget上下文菜单处理函数
QWidget类是Qt中所有可视化部件的基类,其很多函数都是虚函数,能被子类重写以表现不同形式和功能,今天来学习一下QWdiget的事件处理函数. 事件是鼠标.键盘或系统因其自身某些状态发生改变而引起 ...
- notepad++如何移除重复的行
Removing duplicate rows in Notepad++ (so链接) 1. 插件 TextFX 2. 正则表达式:^(.*?)$\s+?^(?=.*^\1$)
- 006-完全关闭win任务栏鼠标悬停预览
经过测试, 网上大部分的修改注册表等方法一律没有效果 最终找到一款轻量级软件完美解决问题 下载地址
- stl_map.h
stl_map.h // Filename: stl_map.h // Comment By: 凝霜 // E-mail: mdl2009@vip.qq.com // Blog: http://blo ...
- Handler的另外一种用法(HandlerThread)
直接上代码: public void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); Handler ...
- mysql删除重复数据方法
create table tmp SELECT * from lhb t where t.id not in (select max(id) from lhb group by code,date,r ...
- freeMarker(十)——模板语言之内建函数
学习笔记,选自freeMarker中文文档,译自 Email: ddekany at users.sourceforge.net 1.字符串内建函数 这些内建函数作用于表达式左侧的字符串值. 如果左侧 ...
- FFMPEG实现的转码程序
本例子是由FFEMPG的doc/example例子transcode.c修改而来,可以根据需求任意转换音视频的编码. 原来的例子的作用更类似于remux,并没有实现转码的功能,只是实现了格式转换,比如 ...
- ACM学习历程—HDU4415 Assassin’s Creed(贪心)
Problem Description Ezio Auditore is a great master as an assassin. Now he has prowled in the enemie ...