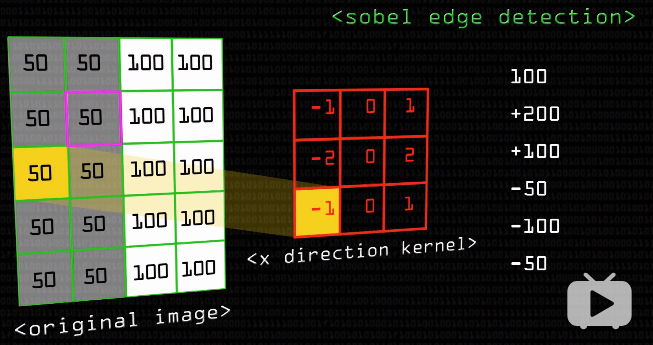
Sobel边缘检测
Sobel算子:[-1 0 1
-2 0 2
-1 0 1]
用此算子与原图像做卷积,可以检测出垂直方向的边缘。算子作用在图像的第二列,结果是:200,200,200;作用在第三列,结果是:
200,200,200;
对当前列左右两侧的元素进行差分,由于边缘的值明显小于(或大于)周边像素,所以边缘的差分结果会明显不同,这样就提取出了垂直边缘。同理,把上面那个矩阵转置一下,就是提取水平边缘。这种差分操作就称为图像的梯度计算。
图像梯度
概念: 把图片想象成连续函数,因为边缘部分的像素值是与旁边像素明显有区别的,所以对图片局部求极值,就可以得到整幅图片的边缘信息了。不过图片是二维的离散函数,导数就变成了差分,这个差分就称为图像的梯度。
理解:求一阶差分应该是指对图像相邻像素求取差分。
边缘 – 是像素值发生跃迁的地方(变化率最大处,导数最大处),是图像的显著特征之一,在图像特征提取、对象检测、模式识别等方面都有重要的作用。
Sobel算子和Scharr算子
(1)Sobel算子:是离散微分算子(discrete differentiation operator),用来计算图像灰度的近似梯度,梯度越大越有可能是边缘。
Soble算子的功能集合了高斯平滑和微分求导,又被称为一阶微分算子,求导算子,在水平和垂直两个方向上求导,得到的是图像在X方法与Y方向梯度图像。
缺点:比较敏感,容易受影响,要通过高斯模糊(平滑)来降噪。
算子是通过权重不同来扩大差异。
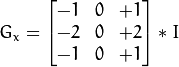
梯度计算:(在两个方向求导,假设被作用图像为 I)
水平变化: 将 I 与一个奇数大小的内核 Gx进行卷积。比如,当内核大小为3时, Gx的计算结果为:
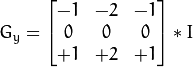
垂直变化: 将 I 与一个奇数大小的内核 Gy进行卷积。比如,当内核大小为3时, Gy的计算结果为:
在图像的每一像素上,结合以上两个结果求出近似梯度:
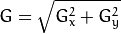
有时也用下面更简单公式代替,计算速度快:(最终图像梯度)。

(2)Scharr:当内核大小为3时, 以上Sobel内核可能产生比较明显的误差(毕竟,Sobel算子只是求取了导数的近似值)。 为解决这一问题,OpenCV提供了 Scharr 函数,但该函数仅作用于大小为3的内核。该函数的运算与Sobel函数一样快,但结果却更加精确,不怕干扰,其内核为:
(3)Sobel/Scharr提取边缘(求导)步骤:
1)高斯模糊平滑降噪:
GaussianBlur( src, dst, Size(3,3), 0, 0, BORDER_DEFAULT );
2)转灰度:
cvtColor( src, gray, COLOR_RGB2GRAY );
3)求X和Y方向的梯度(求导):
Sobel(gray_src, xgrad, CV_16S, 1, 0, 3);
Sobel(gray_src, ygrad, CV_16S, 0, 1, 3);
Scharr(gray_src, xgrad, CV_16S, 1, 0);
Scharr(gray_src, ygrad, CV_16S, 0, 1);
4)像素取绝对值:
convertScaleAbs(A, B); //计算图像A的像素绝对值,输出到图像B

5)相加X和Y,得到综合梯度,称为振幅图像:
addWeighted( A, 0.5,B, 0.5, 0, AB); //混合权重相加,效果较差
或者循环获取像素,每个点直接相加,效果更好。
来源:https://zhuanlan.zhihu.com/p/40491339
来源:https://zhuanlan.zhihu.com/p/50966625
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
Sobel算子是典型的基于一阶导数的边缘检测算子,由于该算子中引入了类似局部加权平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。Sobel算子对于象素的位置的影响做了加权。
Sobel算子包含两组3x3的矩阵,分别为横向及纵向模板,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
Sobel算子是典型的基于一阶导数的边缘检测算子,是离散型的差分算子。该算子对噪声具有平滑作用,能很好的消除噪声的影响。Sobel算子对于像素的位置的影响做了加权,与Prewitt算子、Roberts算子相比因此效果更好。
Sobel算子包含两组3x3的矩阵,分别为横向及纵向模板,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
链接:https://zhuanlan.zhihu.com/p/56728333
import cv2
import numpy as np
img = cv2.imread("fengjing.jpg", 0)
x = cv2.Sobel(img,cv2.CV_16S,1,0) #1,0代表只计算x方向计算边缘
y = cv2.Sobel(img,cv2.CV_16S,0,1) #0,1代表只在y方向计算边缘
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
dst = cv2.addWeighted(absX,0.5,absY,0.5,0)
cv2.imshow("absX", absX)
cv2.imshow("absY", absY)
cv2.imshow("Result", dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
测试图片:

运行结果:
Sobel边缘检测的更多相关文章
- 图像特征提取:Sobel边缘检测
前言 点和线是做图像分析时两个最重要的特征,而线条往往反映了物体的轮廓,对图像中边缘线的检测是图像分割与特征提取的基础.文章主要讨论两个实际工程中常用的边缘检测算法:Sobel边缘检测和Canny边缘 ...
- Sobel边缘检测算法(转载)
转载请注明出处: http://blog.csdn.net/tianhai110 索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰 ...
- 数字图像处理之sobel边缘检测
在前两部文章介绍了几种边缘检测算法,和位图的内存结构.如果对前两篇文章已经理解透彻 了,那么本文将带你进入数字图像处理的世界. 本文通过C代码实现基本的sobel边缘检测,包括8个方向和垂直方向: 代 ...
- 基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 基于MATLAB的Sobel边缘检测算法实现
图像边缘就是图像灰度值突变的地方,也就是图像在该部分的像素值变化速度非常之快,就比如在坐标轴上一条曲线有刚开始的平滑突然来个大转弯,在变化出的导数非常大. Sobel算子主要用作边缘检测,它是一离散型 ...
- 【转】基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- Sobel边缘检测算法
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值.在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量 Sobe ...
- zedboard zynq 学习 sobel 边缘检测 IP核 制作 根据 文档 Xapp890
官方文档http://www.xilinx.com/support/documentation/application_notes/xapp890-zynq-sobel-vivado-hls.pdf ...
- SSE再学习:灵活运用SIMD指令6倍提升Sobel边缘检测的速度(4000*3000的24位图像时间由180ms降低到30ms)。
这半年多时间,基本都在折腾一些基本的优化,有很多都是十几年前的技术了,从随大流的角度来考虑,研究这些东西在很多人看来是浪费时间了,即不能赚钱,也对工作能力提升无啥帮助.可我觉得人类所谓的幸福,可以分为 ...
随机推荐
- pycharm下: conda installation is not found ----一个公开的bug的解决方案
pycharm conda installation is not found ----一个公开的bug的解决方案 pycharm+anaconda 是当前的主流的搭建方案,但是常出现上述问题. ...
- LinkedList add remove get 代码分析
add void linkLast(E e) { //e 要添加的元素 final Node<E> l = last; // 最后一个元素 final Node<E> newN ...
- The best way to predict the future is to invent it,预测未来最好的方法是创造它!
The best way to predict the future is to invent it,预测未来最好的方法是创造它! ——Smalltalk发明人Alan Kay “预测未来的最好方法, ...
- Android studio 百度地图开发(3)地图导航
Android studio 百度地图开发(3)地图导航 email:chentravelling@163.com 开发环境:win7 64位,Android Studio,请注意是Android S ...
- 怎样取消不能改动(仅仅读打开)的word文件的password
作者:iamlaosong 朋友给我一个文档,是加了防改动password的,希望我能帮其取消.由于须要原文档的格式,取消方法例如以下(office2007环境): 1.打开文件.文件打开时,提演示样 ...
- 机器学习10—K-均值聚类学习笔记
机器学习实战之K-Means算法 test10.py #-*- coding:utf-8 import sys sys.path.append("kMeans.py") impor ...
- windows_64下python下载安装Numpy、Scipy、matplotlib模块
本文应用的python3.6.3及其对应的Numpy.Scipy.matplotlib计算模块的cp36版本,其中Numpy是需要MKL版本的Numpy,这是后续安装Scipy的需要(本机系统win7 ...
- 修改Liunx服务器SSH端口
为提高Linux系统安全性,我们经常会修改ssh端口,下面以CentOS 6为例: vi /etc/ssh/sshd_config 修改ssh端口,默认配置如下: 修改为自己想要的端口号(小于6553 ...
- PMD:Java源代码扫描器
PMD是一个开源代码分析器.可以查找常见编程缺陷,比如未使用的变量.空catch代码块.不必要的对象创建等.支持Java.JavaScript.PLSQL.Apache Velocity.XML.XS ...
- swoole创建TCP服务端和客户端
服务端: server.php <?php //创建Server对象,监听 127.0.0.1:9501端口 $serv = new swoole_server("127.0.0 ...