Codeforces 601B. Lipshitz Sequence(单调栈)
Codeforces 601B. Lipshitz Sequence
题意: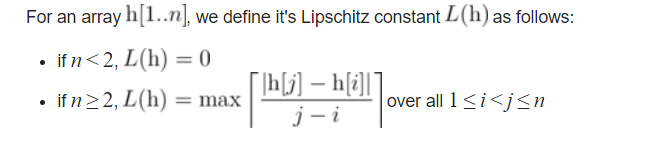 ,q个询问,每次询问给出l,r,求a数组[l,r]中所有子区间的L值的和。
,q个询问,每次询问给出l,r,求a数组[l,r]中所有子区间的L值的和。
思路:首先要观察到,斜率最大值只会出现在相邻两点上,因此可以处理出d数组,d[i]=a[i]-a[i-1]。则问题转化为求d数组在指定区间内,所有子区间的最大值的和。枚举子区间的复杂度是平方级别,显然是不能接受的,所以可以用单调栈预处理出每个d[i]可以成为最大值的最大区间(形象地说,也就是d[i]为最大值的域可以延伸到左、右各多远),用l,r数组保存这个信息,这样面对每次询问,只需要O(n)遍历d数组指定区间,累加d[i]*“d[i]为最值的区间个数”(这个可以根据l[i],r[i]的信息O(1)算出),累加结果即为本次询问答案。总的复杂度为O(q*n)。
#include<iostream>
#include<cstdio>
#include<algorithm>
#include<vector>
#include<map>
#include<set>
#include<queue>
#include<cstring>
#include<cmath>
#include<functional>
#include<climits>
#include<string>
#define dd(x) cout<<#x<<" = "<<x<<" "
#define de(x) cout<<#x<<" = "<<x<<"\n"
#define Clear(x,y) memset(x,y,sizeof(x))
#define pb push_back
#define mp make_pair
#define fi first
#define se second
#define lson l,m,rt<<1
#define rson m+1,r,rt<<1|1
using namespace std;
typedef long long ll;
typedef long double ld;
typedef pair<int,int> P;
typedef vector<int> V;
typedef map<int,int> M;
typedef set<int> S;
typedef queue<int> Q;
typedef priority_queue<int> BQ;
typedef priority_queue<int,vector<int>,greater<int> > SQ;
const int maxn=1e5+10,mod=1e9+7,INF=0x3f3f3f3f;
int a[maxn],d[maxn],l[maxn],r[maxn],stack[maxn],top;
void init(int n)
{
for (int i=2;i<=n;++i)
{
while (top>0&&d[stack[top]]<=d[i])
r[stack[top--]]=i-1;
l[i]=stack[top]+1;
stack[++top]=i;
}
while (top>0)
r[stack[top--]]=n;
}
int main()
{
int n,q;
scanf("%d%d",&n,&q);
for (int i=1;i<=n;++i)
{
scanf("%d",&a[i]);
d[i]=abs(a[i]-a[i-1]);
}
init(n);
while (q--)
{
int L,R;
scanf("%d%d",&L,&R);
ll ans=0;
for (int i=L+1;i<=R;++i)
{
int _l=max(l[i]-1,L),_r=min(r[i],R);
ans+=ll(d[i])*(i-_l)*(_r-i+1);
}
printf("%lld\n",ans);
}
return 0;
}
Codeforces 601B. Lipshitz Sequence(单调栈)的更多相关文章
- Codeforces Round #333 (Div. 1)--B. Lipshitz Sequence 单调栈
题意:n个点, 坐标已知,其中横坐标为为1~n. 求区间[l, r] 的所有子区间内斜率最大值的和. 首先要知道,[l, r]区间内最大的斜率必然是相邻的两个点构成的. 然后问题就变成了求区间[l, ...
- CodeForces 601B Lipshitz Sequence
Lipshitz Sequence 题解: 可以通过观察得到,对于任意一个区间来说, 只有相邻的2个点的差值才会是区间的最大值. 具体观察方法,可以用数学分析, 我是通过画图得到的. 那么基于上面的观 ...
- Codeforces 407E - k-d-sequence(单调栈+扫描线+线段树)
Codeforces 题面传送门 & 洛谷题面传送门 深感自己线段树学得不扎实-- 首先特判掉 \(d=0\) 的情况,显然这种情况下满足条件的区间 \([l,r]\) 中的数必须相同,双针扫 ...
- Imbalanced Array CodeForces - 817D (思维+单调栈)
You are given an array a consisting of n elements. The imbalance value of some subsegment of this ar ...
- Codeforces #123D: 后缀数组+单调栈
D. String You are given a string s. Each pair of numbers l and r that fulfill the condition 1 ≤ ...
- 【bzoj1345】[Baltic2007]序列问题Sequence 单调栈
题目描述 对于一个给定的序列a1, …, an,我们对它进行一个操作reduce(i),该操作将数列中的元素ai和ai+1用一个元素max(ai,ai+1)替代,这样得到一个比原来序列短的新序列.这一 ...
- Codeforces - 1199D - Welfare State - 单调栈 / 线段树
https://codeforc.es/contest/1199/problem/D 其实后来想了一下貌似是个线段树的傻逼题. 单调栈是这样思考的,每次单点修改打上一个最终修改的时间戳.每次全体修改就 ...
- CodeForces 280B(枚举 + 单调栈应用)
题目链接 思路如下 这题恶心的枚举任意区间的 最大值及次最大值 ,正常的操作是,是很难实现的,但偏偏有个 单调栈这个动西,能够完成这个任务,跟单调队列相似,有单调 递增.递减的栈,这一题我们需要维护的 ...
- Stack Sorting CodeForces - 911E (思维+单调栈思想)
Let's suppose you have an array a, a stack s (initially empty) and an array b (also initially empty) ...
随机推荐
- 手机设置Fiddler代理后无法访问Https网络的解决办法
第一种方法: 首先,下载最新版本的Fiddler,将手机和PC设置为统一局域网(手机链接PC的wifi) 打开手机设置-无线网络设置,设置代理为手动,输入pc的ip和Fillder的端口8888(Fi ...
- 并不对劲的CF1194E:Count The Rectangles
题意 有\(n\)(\(n\leq 5000\))个平行于x轴或平行于y轴的线段.求这些线段围成了多少个长方形.由多个长方形拼成的也算. 题解 考虑暴力的做法:先分别计算每条横着的线与哪些竖着的线有交 ...
- log4j application.properties 配置文件
log4j.rootLogger = info,stdout log4j.appender.stdout = org.apache.log4j.ConsoleAppenderlog4j.appende ...
- layer,备受青睐的web弹层组件
//http://layer.layui.com/ 特别说明:事件需自己绑定,以下只展现调用代码. //初体验 layer.alert('内容') //第三方扩展皮肤 layer.alert('内容' ...
- Sharepoint2010设置自定义母版页
前言 这个文档是为Microsoft Sharepoint2010 上海文档库公司站点设计的母版页,其版本为1.0,为相关的源文件编写的使用说明书. 使用SharePoint Designer 201 ...
- vue中的绑定class和微信小程序中的绑定class的区别
微信小程序 小程序里面的class与style绑定,遵循HTML特性绑定,有关于HTML绑定.在进行class与style绑定时,可以直接绑定,也可以带上逻辑与,或者三元运算进行条件控制 JS dat ...
- 4.SpringMVC 配置式开发-处理器映射器
处理器映射器 HandlerMapping HandlerMapping 接口负责根据request请求找到对应的Handler处理器及Interceptor拦截器, 并将它们封装在HandlerEx ...
- 【uoj#46】 [清华集训2014] 玄学
题目传送门:uoj46 题意简述:要求在序列上维护一个操作间支持结合律的区间操作,查询连续一段时间内的操作对单点的作用效果,\(n \leq 10^5,m \leq 6 \times 10^5 ...
- redis __详解 (转载自作者:孤独烟 出处: http://rjzheng.cnblogs.com/)
https://www.cnblogs.com/rjzheng/p/9096228.html [原创]分布式之redis复习精讲 引言 为什么写这篇文章? 博主的<分布式之消息队列复习精讲> ...
- cent os 7.0 出现的问题解决方法
https://www.jb51.net/article/34012.htm python重编译,并进行安装 https://www.jb51.net/os/RedHat/211444.h ...