蓝牙4.0模块,AT指令集
一,LED状态

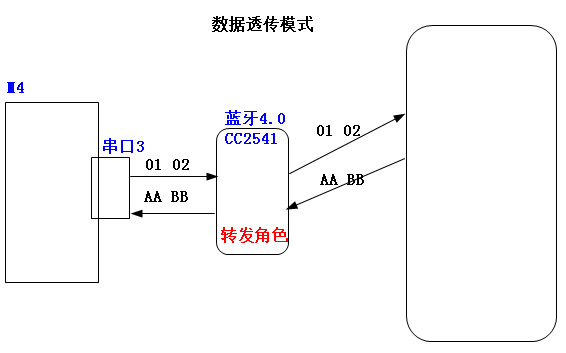
二,蓝牙模块有两种通信模式
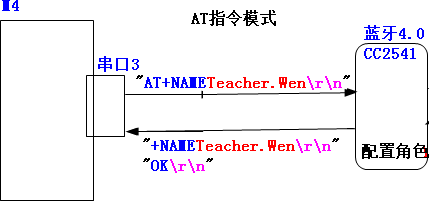
1,AT指令模式

2,数据透传模式
三、AT指令程序设计
1、设置模块的名字
void usart3_send_str(char *pbuf)
{
while(pbuf && *pbuf)
{
USART_SendData(USART3,*pbuf++);
while(USART_GetFlagStatus(USART3,USART_FLAG_TXE)==RESET);
}
} void ble_set_config(void)
{
//配置模块的名字
usart3_send_str("AT+NAMETeacher.Wen\r\n");
delay_ms();
}
#include "stm32f4xx.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_usart.h"
#include "stdio.h" static GPIO_InitTypeDef GPIO_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure; void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD =SystemCoreClock//*nus; //时间加载
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //使能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(<<))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
} void delay_ms(uint16_t nms)
{
uint32_t temp;
SysTick->LOAD=SystemCoreClock//*nms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(<<))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
} void LED_Init(void)
{ //使能GPIOE,GPIOF时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOF, ENABLE); //GPIOF9,F10初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //LED0和LED1对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式,
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOF,把配置的数据写入寄存器 //GPIOE13,PE14初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14; //LED2和LED3对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE,把配置的数据写入寄存器 GPIO_SetBits(GPIOF,GPIO_Pin_9 | GPIO_Pin_10); //GPIOF9,PF10设置高,灯灭
GPIO_SetBits(GPIOE,GPIO_Pin_13 | GPIO_Pin_14);
} void USART1_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //使能USART1时钟 //串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1 //USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_Cmd(USART1, ENABLE); //使能串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断 //Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
} void USART3_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); //使能GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //使能USART3时钟 //串口3对应引脚复用映射
GPIO_PinAFConfig(GPIOB,GPIO_PinSource10,GPIO_AF_USART3); //GPIOB10复用为USART3
GPIO_PinAFConfig(GPIOB,GPIO_PinSource11,GPIO_AF_USART3); //GPIOB11复用为USART3 //USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11; //GPIOB10与GPIOB11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化PB10,PB11 //USART1 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口3 USART_Cmd(USART3, ENABLE); //使能串口3 USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //开启相关中断 //Usart3 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; //串口3中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
} //重定义fputc
int fputc(int ch,FILE *f)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); return ch;
} void usart1_send_bytes(uint8_t *pbuf,uint32_t len)
{
while(len--)
{
USART_SendData(USART1,*pbuf++);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
} void usart1_send_str(char *pbuf)
{
while(pbuf && *pbuf)
{
USART_SendData(USART1,*pbuf++);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
} void usart3_send_bytes(uint8_t *pbuf,uint32_t len)
{
while(len--)
{
USART_SendData(USART3,*pbuf++);
while(USART_GetFlagStatus(USART3,USART_FLAG_TXE)==RESET);
}
} void usart3_send_str(char *pbuf)
{
while(pbuf && *pbuf)
{
USART_SendData(USART3,*pbuf++);
while(USART_GetFlagStatus(USART3,USART_FLAG_TXE)==RESET);
}
} void ble_set_config(void)
{
//配置模块的名字
usart3_send_str("AT+NAMEHELLO\r\n");
delay_ms();
} int main(void)
{ LED_Init(); //系统定时器初始化,时钟源来自HCLK,且进行8分频,
//系统定时器时钟频率=168MHz/8=21MHz
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //设置中断优先级分组2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //串口1,波特率115200bps,开启接收中断
USART1_Init(); printf("hello ble at test\r\n"); //串口3,波特率9600bps,开启接收中断,蓝牙模块出厂设置为9600bps
USART3_Init(); ble_set_config(); while()
{ }
} void USART1_IRQHandler(void) //串口1中断服务程序
{
uint8_t d; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
//接收数据
d = USART_ReceiveData(USART1); //发送数据
usart3_send_bytes(&d,); } } void USART3_IRQHandler(void) //串口3中断服务程序
{
uint8_t d; if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //接收中断
{
//接收数据
d = USART_ReceiveData(USART3); //发送数据
usart1_send_bytes(&d,); } }
main.c
蓝牙4.0模块,AT指令集的更多相关文章
- RF-BM-S02(V1.0)蓝牙4.0模块 使用手册
一.产品概述 图1 RF-BM-S02纯硬件模块 RF-BM-S02是一款采用美国德州仪器TI 蓝牙4.0 CC2540作为核心处理器的高性能.超低功耗(Bluetooth Low Energy)射频 ...
- 信驰达蓝牙4.0模块全面升级 v2.20 U最新发布
作为国际蓝牙联盟成员之一,德州仪器(TI)于2012年强势推出CC254X系列单芯片(SOC)低功耗蓝牙收发器,经典51内核,最强优势在于丰富的外围(21个IO,UART,SPI,USB2.0,PWM ...
- 蓝牙4.0模块控制LED彩灯调光调色经验之谈
基于蓝牙模块的智能LED彩灯调光调色控制思路如下: 在此,找一个低功耗蓝牙模块内嵌接入LED灯的控制电路板,接入LED彩灯的控制电路中. 蓝牙模块彩灯控制方式如下,本文两类来解说led灯的控制方式: ...
- 基于蓝牙4.0(Bluetooth Low Energy)胎压监测方案设计
基于一种新的蓝牙技术——蓝牙4.0(Bluetooth Low Energy)新型的胎压监测系统(TPMS)的设计方案.鉴于蓝牙4.0(Bluetooth Low Energy)的低成本.低功耗.高稳 ...
- 蓝牙4.0(BLE)开发
转载请注明出处 http://blog.csdn.net/pony_maggie/article/details/26740237 作者:小马 IOS学习也一段时间了,该上点干货了.前段时间研究了一下 ...
- IOS学习之蓝牙4.0 BLE
IOS学习也一段时间了,该上点干货了.前段时间研究了一下IOS蓝牙通讯相关的东西,把研究的一个成果给大家分享一下. 一 项目背景 简单介绍一下做的东西,设备是一个金融刷卡器,通过蓝牙与iphone手机 ...
- iOS蓝牙BLE4.0通信功能
概述 iOS蓝牙BLE4.0通信功能,最近刚学的苹果,为了实现蓝牙门锁的项目,找了一天学习了下蓝牙的原理,亲手测试了一次蓝牙的通信功能,结果成功了,那么就把我学习的东西分享一下. 详细 代码下载:ht ...
- Android5.0(Lollipop) BLE蓝牙4.0+浅析demo连接(三)
作者:Bgwan链接:https://zhuanlan.zhihu.com/p/23363591来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. Android5.0(L ...
- IN612 IN612L蓝牙5.0 SoC芯片替换NRF52832/NRF52840
IN612L是美国公司INPLAY的SOC产品系列之一,具有多模协同2.4G无线协议栈,支持2.4G私有协议栈以及蓝牙5.0全协议栈的SOC芯片.如2mbps高数据速率模式,125kbps/500kb ...
随机推荐
- linux中部署jenkins(war包)及jenkins忘记登录账号密码
未登录状态 登录状态 一:部署jenkins(war包) 1.直接下载war包jenkins.war,下载地址https://jenkins.io/download 2.将下载的war包放到服务器上t ...
- Codeforces 1249 E. By Elevator or Stairs?
传送门 首先显然下楼的操作一定是不优的,所以只要考虑上楼 设 $f[i]$ 表示到第 $i$ 层时需要的最少时间 那么首先考虑走楼梯,有转移,$f[i]=f[i-1]+a[i-1]$ 然后考虑坐电梯有 ...
- 监听lsnrctl status查询状态报错linux error 111:connection refused
报错现象 今天给客户一个单实例环境配置监听,创建正常,查询状态异常报错 tns tns tns linux error :connection refused 匹配MOS Starting TNS L ...
- C# DateTime Subtract
DateTime start = DateTime.Now.AddDays(-20); DateTime end = DateTime.Now; TimeSpan ts = end.Subtract( ...
- (十)springmvc之文件的处理
一.同步上传文件 导入common-fileupload这个jar包. 配置 springmvc-servlet.xml <?xml version="1.0" en ...
- Windows 10 下 Linux 子系统的安装和使用
介绍 适用于 Windows 的 Linux 子系统(英语:Windows Subsystem for Linux,简称 WSL)是一个为在 Windows 10 和 Windows Server 2 ...
- 英特尔vPro博锐技术激活
英特尔vPro博锐技术激活 参考: Intel官方Management Engine BIOS Extension (Intel®MEBX)手册:http://www.intel.com/conten ...
- Trie树(字典树)-题解 P2580 【于是他错误的点名开始了】
此题可以用STL中的map做,但是了解一下Trie树这个数据结构也是必须的. Trie树(又称字典树)有以下特点: 根节点不包含字符,除它之外的每一个节点都包含一个字符. 从根节点到某一节点,路径上经 ...
- ThinkPHP5.0.*远程代码执行漏洞预警
安全公告 Thinkphp5.0.*存在远程代码执行漏洞. 漏洞描述 Thinkphp5.0.*存在远程代码执行漏洞.攻击者可以利用漏洞实现任意代码执行等高危操作. 目前官方已经出了补丁: https ...
- 字符串slice、substring、substr
1.slice() 可以为负数,如果起始位置为负数,则从字符串最后一位向前找对应位数并且向后取结束位置,如果为正整数则从前往后取起始位置到结束位置. 2.substring() 只能非负整数,截取起始 ...