Motion control encoder extrapolation
Flying Saw debug
Part1 Encoder extrapolation
Machine introduction
A tube cutting saw, is working for cut tube to length in line.
A measuring wheel measures the position of the tube, when cutlength reached the moving table gearon with the measuring wheel. When the table and measuring wheel synchronized, the saw blade start cut. After cut finished or the moving table reach back position, the table pos back to start position.
This machine is controlled by siemens simotionD motion controller.The program is written by other engineer, after using for several month , user find some problems. I am in charge for on site commissioning.
max line speed : 80m/min

Problem1: cut length out of tolarence when accelaration and deceleration
Appearance:
When acceleration, actual cut length longer than set length.When deceleration, actual cut length shorter than set length. The length different could bigger than 10mm.
Analyze:
If an axis gearing/camming with another axis(or encoder), assume the gearing ratio is 1:1 and every parameter is default value. The slave position will always behind master position, because there is delay in the control loops.
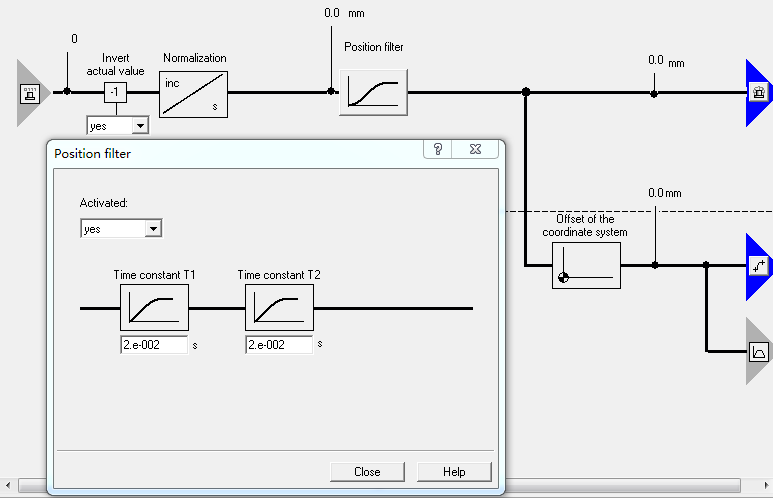
I check the program, and find the encoder has set position filter. As encoder is the master of the carriage, because there is some ocillation is the tube, using position filter is a good solution. The position filter in this project is 20ms + 20ms.
Position filter has a good affect that the speed is smooth, and a bad affect that the filtered position is lagged behind the actual position.
Position delayed = encoderVelocity x filterTime
Extrapolation
There is several solution to handle the position difference. Extrapolation is an easy and effective method.
Extrapolation position
= positionBeforeExtrapolation + ExtrapolationVelocity x ExtrapolationTime
Extrapolation velocity = differential(Extrapolation position)
The graph below is extrapolation signal flow. In the middle of graph, is extrapolation time. Before extrapolation ,there is a position filter in position channel , and a velocity filter in velocity channel. These two filter only effective when extrapolation time bigger than 0.

Extrapolation setting method
Step 1:
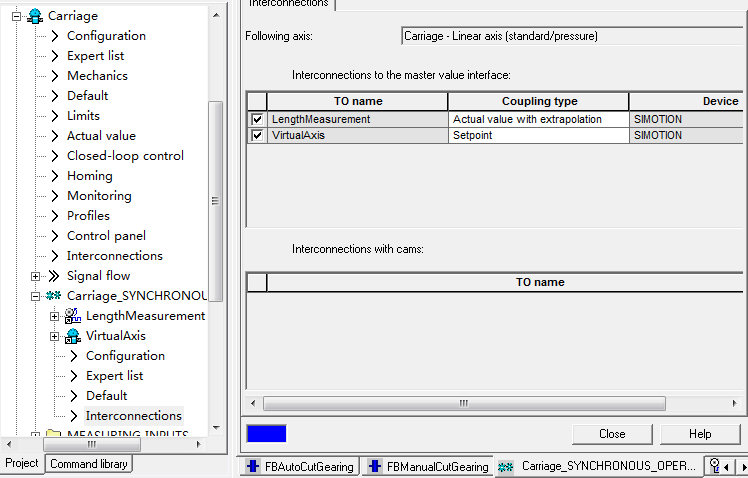
In the FlyingSaw Axis interconnections, select "Actual value with extrapolation" of encoder.
Step 2: set extrapolation velocity filter
I prefer "mean value filter" than the "pt1/pt2" filter.
velocity filter time could be 0.1 to 0.2s. This filter is very important, a smooth velocity ensured the extrapolation value is stable.

Step 3:
how long the extropolation time should be? experience should related to the system delay time. So I can write an equation here.
extrapolation time ≈ Positionfiltertime + 2*ipo_time
= 20ms + 20ms + 2ms = 42ms (in this project)
If you are not sure about the filter time, then try a smaller value, like 70% of the calulated value.
Result
After implement extrapolation, the cutting accuracy at acceleration and deceleration is much better, length different less than 2mm.

Motion control encoder extrapolation的更多相关文章
- V-rep学习笔记:Reflexxes Motion Library 1
V-REP中集成了在线运动轨迹生成库Reflexxes Motion Library Type IV,目前Reflexxes公司已经被谷歌收购.(The Reflexxes Motion Librar ...
- The Enginer sample Test for GD temperature control (FCT, ATE, NPI,SMT, )
For me it is a day of grief.................... 1 Communication with customer test methods. notes: T ...
- 【论文阅读】Motion Planning through policy search
想着CSDN还是不适合做论文类的笔记,那里就当做技术/系统笔记区,博客园就专心搞看论文的笔记和一些想法好了,[]以后中框号中间的都算作是自己的内心OS 有时候可能是问题,有时候可能是自问自答,毕竟是笔 ...
- 周期同步位置模式(CSP),轮廓位置模式(PPM),位置模式(PM)
什么是运动控制? 运动控制就是通过机械传动装置对运动部件的位置.速度进行实时的控制管理,使运动部件按照预期的轨迹和规定的运动参数(如速度.加速度参数等)完成相应的动作. 运动控制系统的典型构成 1. ...
- (zhuan) Deep Reinforcement Learning Papers
Deep Reinforcement Learning Papers A list of recent papers regarding deep reinforcement learning. Th ...
- VES Hand Book Contents
3...ABOUT THE VES4...Foreword 6...Chapter 1......Introduction6......Visual Effects and Special Effec ...
- Digests from CG articales
Turtle Talk Prior to the on-set motion capture, the team had the actors perform expressions while be ...
- 读书笔记-Autonomous Intelligent Vehicles(一)
Autonomous intelligent vehicles have to finish the basic procedures: perceiving and modeling environ ...
- jquery和css自定义video播放控件
下面介绍一下通过jquery和css自定义video播放控件. Html5 Video是现在html5最流行的功能之一,得到了大多数最新版本的浏览器支持.包括IE9,也是如此.不同的浏览器提供了不同的 ...
随机推荐
- 46. leetcode 500. Keyboard Row
500. Keyboard Row Given a List of words, return the words that can be typed using letters of alphabe ...
- 6.linux下部署 web 项目
安装java 1.下载 linux 环境的jdk 2.上传该压缩包到 linux 系统中并且解压 tar -zxvf 压缩包名 3.配置环境变量并且刷新配置 export JAVA_HOME=/ali ...
- 资金平台交易明细扩展开发-DEP
前言 支持农垦项目中,需要增加抓取银行接口传输数据,需求有两点:一是银企平台前置机需要增加扩展中行.农行数据字段.(代理账号.代理账户名称.代理银行) 二是EAS资金模块中的交易明细查询列表界面能够显 ...
- 【转载】QT MySQL数据库操作总结
转载自http://blog.chinaunix.net/uid-28194872-id-3631462.html #include <QtSql> QT += sqlQSqlDataba ...
- window响应拖拽文件操作
window响应拖拽文件操作 1.首先调用DragAcceptFiles,让控件或者窗体支持文件拖动操作函数功能:用来为拖放文件作初始化.函数原型: void DragAcceptFiles( HWN ...
- leetcode Binary Tree Right Side
Given a binary tree, imagine yourself standing on the right side of it, return the values of the nod ...
- PYTHON:新闻聚合
这个项目看了有段时间,因为一直没跑通,而且关于NNTP也不是特别理解.这里是转载code123的分析. 原文地址:http://www.code123.cc/1327.html 书中的第四个练习,新闻 ...
- iOS之网络请求NSURLSession剖析
2013年的WWDC大会上,苹果推出了NSURLSession,对Foundation URL加载系统进行了彻底的重构,提供了更丰富的API来处理网络请求,如:支持http2.0协议.直接把数据下载到 ...
- 如何在GitHub上生成ssh公钥并用NetBeans克隆项目
一.生成ssh公钥. 1.首先判断本机是否创建了公有密钥: $ ls ~/.ssh 这个命令用于检查是否已经存在 id_rsa.pub 或 id_dsa.pub 文件,如果文件已经存在,下面步骤可省略 ...
- 【学习笔记】深入理解超时调用(setTimeout)和间歇调用(setInterval)
超时调用(setTimeout):在指定的毫秒数后调用函数或计算表达式. setTimeout(func, 1000); // func执行的函数,1000毫秒 间歇调用(setInterval):按 ...