nordic的nrf52系列32M速率的SPI-SPIM3
简介:在nordic的nrf52系列中的nrf52833和nrf52840的SPIM3都是支持最大32M的spi速率,其余的只有8M,当在需要刷屏,或者一些需要高速32M-SPI时,这是一个很好的使用方式,下面我就结合GPIOTE+PPI+SPIM3实现无CPU参与的32M-SPI数据发送:

测试环境:软件:SDK_17.1,在ble_app_uart例子中添加
硬件:nrf52832-DK板
一、引脚选择
特别注意一点,需要使用32M的SPI时,一定要选择非低频的引脚作为SPI的pin脚,如下面这些引脚就不可以:
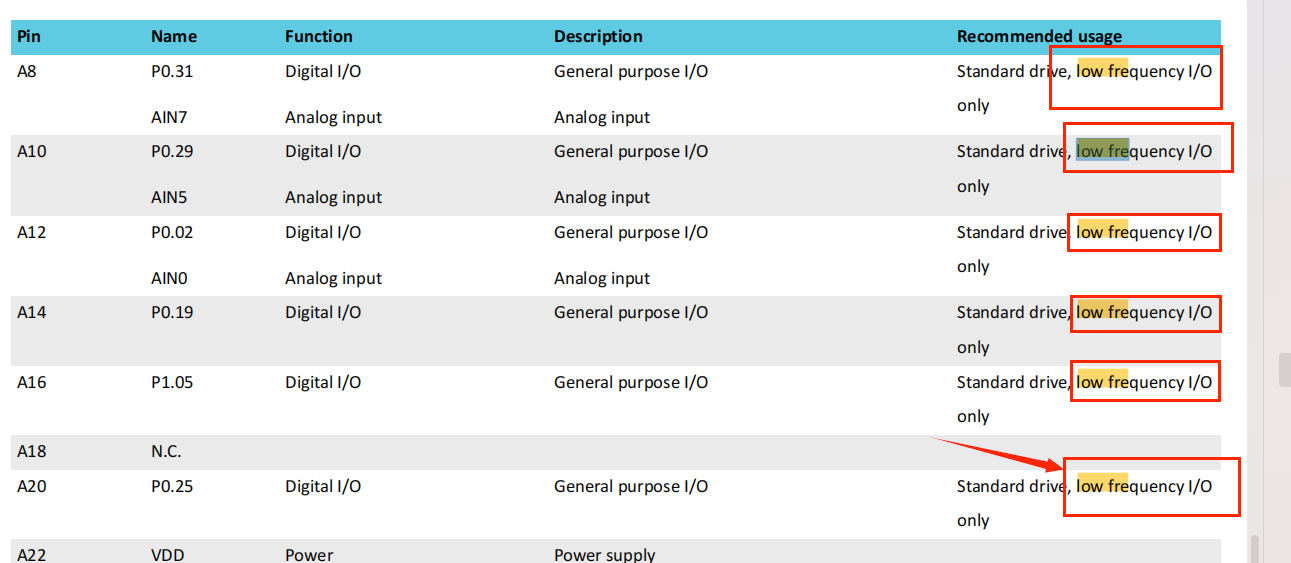
在数据手册中还有这样一条提示,他的意思是在使用32M的时候,可能还要配置为高驱模式,不然可能有数据错乱。

根据数据手册我当前选择4,5,27,26这4个引脚作为SPI的引脚。
二、代码编写
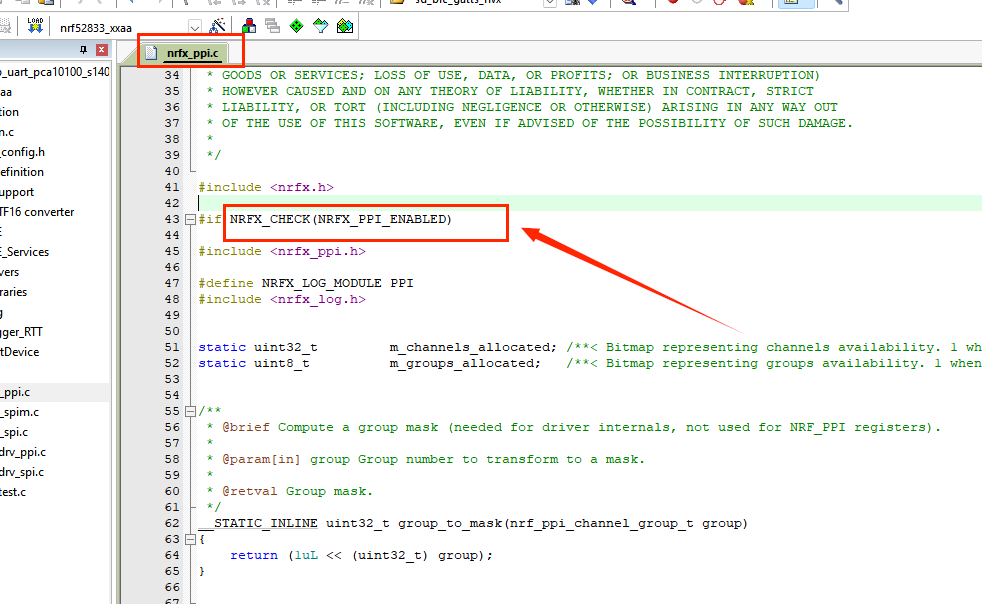
1.源文件添加
在工程中加入如下几个.c源文件,其中spi_test.c不是官方库文件,是我的SPIM配置代码,这一点注意,你只用添加前面的5个源文件就行

2、宏定义启用
这一步主要是启用相关的源文件,如果宏定义不启用刚刚添加的部分源文件是无法添加的,这一步很重要:
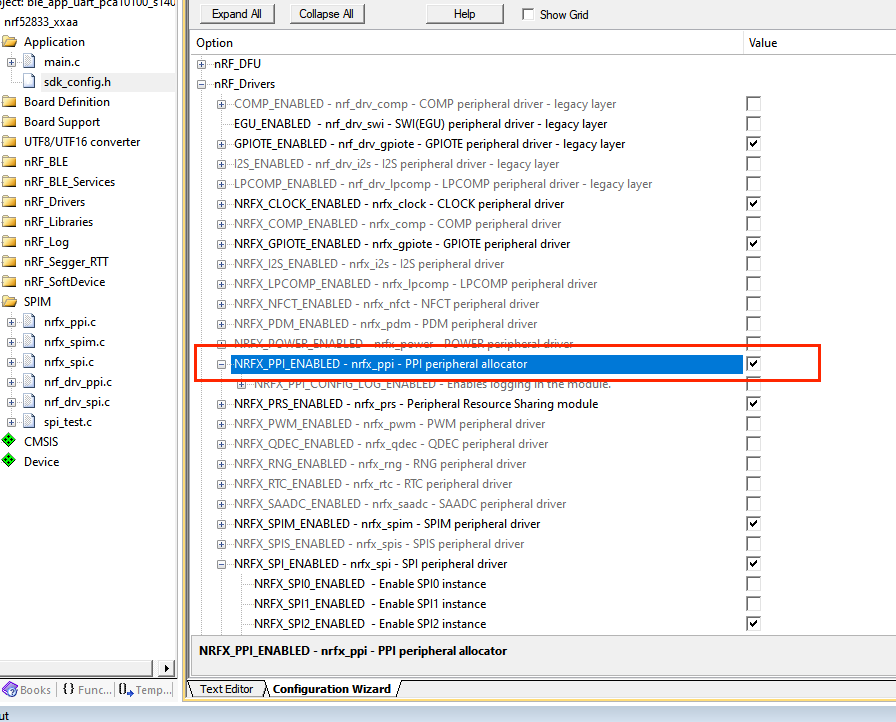
先启用SPIM3:

还要勾选另一个宏定义,在调试过程中发现如果只启动NRFX_SPI_ENABLED,不任意使能它下面的NRFX_SPI0_ENABLED,NRFX_SPI1_ENABLED,NRFX_SPI2_ENABLED的其中一个,居然无法让NRFX_SPIM_ENABLED生效,这一点需要注意一下。
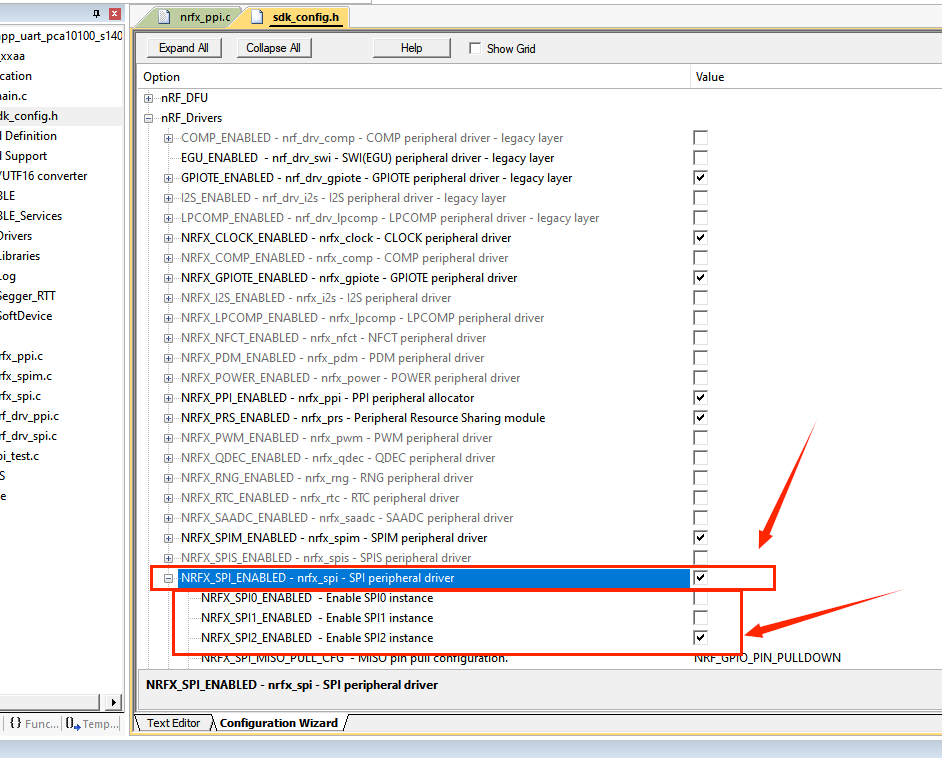
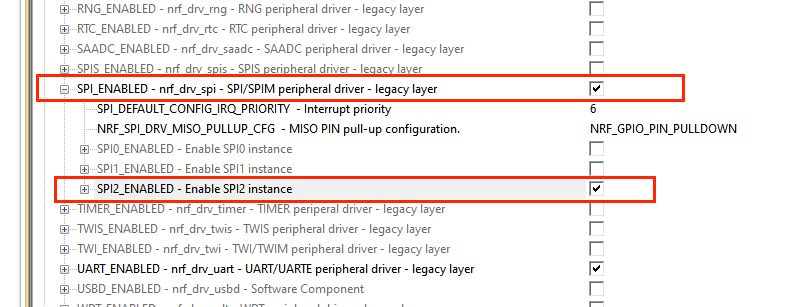
经过以上的宏定义勾选,SPI的驱动就启动完成了。
启用PPI:
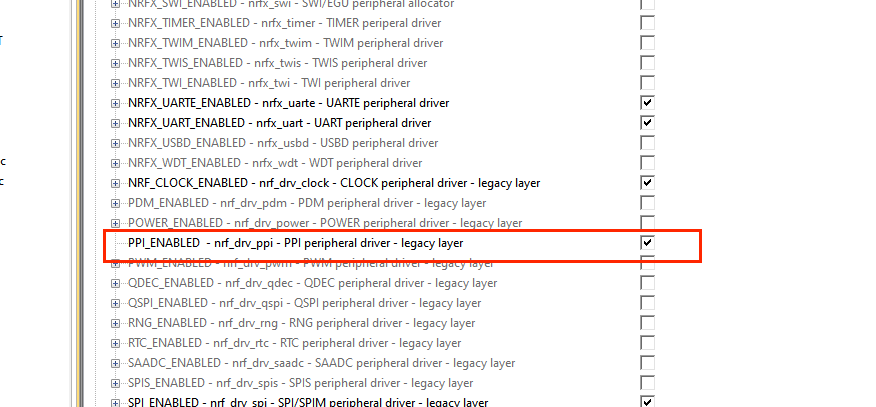
到这一步宏定义就都启用完成了,你可以检测一下加入的源文件是否都启用了。
然后就是代码部分,我已经进行了相关注释,可以直接copy使用。
三、代码
1、.c文件
#include "nrf_drv_spi.h"
#include "app_util_platform.h"
#include "nrf_drv_gpiote.h"
#include "nrf_delay.h"
#include "boards.h"
#include "app_error.h"
#include <string.h> /*log打印的头文件*/
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h" #include "nrf_drv_ppi.h"
#include "spi_test.h" #define PIN_IN BUTTON_4
#define leng 10
#define TEST_STRING "spi_ppi_test" uint8_t TX_buffer[]=TEST_STRING;
uint8_t RX_buffer[leng]; /*PPI 通道实例变了定义*/
static nrf_ppi_channel_t m_ppi_channel; /*SPIM3可以达到32M*/
static nrfx_spim_t my_spi=NRFX_SPIM_INSTANCE(3); /*变量定义,用于确定SPI是否正确传输,每一次都会进行加一,0x31只是一个本次随意设置的初始值*/
uint8_t test=0x31; /*同时设置TX和RX的buffer*/
nrfx_spim_xfer_desc_t m_buffer = NRFX_SPIM_XFER_TRX(TX_buffer,sizeof(TX_buffer),RX_buffer,leng);
/**
* @brief SPI user event handler.
* @param event
*/
void spi_event_handler(nrfx_spim_evt_t const * p_event,
void * p_context)
{
ret_code_t err_code;
/*传输事件判断*/
if(NRF_DRV_SPI_EVENT_DONE == p_event->type)
{
NRF_LOG_INFO("Transfer completed.")
TX_buffer[0]=++test;
/*一次传输完成,提供下一次传输的buffer,如果有大量接收的数据,可以使用两个buffer交替接收,便于流出时间进行数据处理,第二个buffer也是使用
nrfx_spim_xfer_desc_t m_buffer = NRFX_SPIM_XFER_TRX(TX_buffer2,sizeof(TX_buffer2),RX_buffer2,leng2);进行定义,如果是只想单独定义一个TX和RX
请使用 NRFX_SPIM_XFER_TX 或者 NRFX_SPIM_XFER_RX
*/
err_code = nrfx_spim_xfer(&my_spi,&m_buffer,NRF_DRV_SPI_FLAG_HOLD_XFER);
APP_ERROR_CHECK(err_code);
}
/*如果有接收数据就打印一下,实际应用中可以是其余处理*/
if (RX_buffer[0] != 0)
{
NRF_LOG_INFO(" Received:");
NRF_LOG_HEXDUMP_INFO(RX_buffer, strlen((const char *)RX_buffer));
}
} void gpiote_init(void)
{
ret_code_t err_code;
/*由于这个例子是基于ble_app_uart,在 主函数中的buttons_leds_init(&erase_bonds);中已经初始化了GPIOTE,所以注释掉,不能重复初始化*/
// err_code = nrf_drv_gpiote_init();
// APP_ERROR_CHECK(err_code); nrf_drv_gpiote_in_config_t in_config = NRFX_GPIOTE_CONFIG_IN_SENSE_HITOLO(true);
in_config.pull = NRF_GPIO_PIN_PULLUP; /*由于这个例子是基于ble_app_uart,在 主函数中的buttons_leds_init(&erase_bonds);中已经初始化了DK板上的按键4,我要用来做SPI数据触发,所以先解绑这个引脚在配置 */
nrf_drv_gpiote_in_uninit(PIN_IN);
/* 中断初始化,回调为NULL,因为是通过PPI触发SPIM所以不需要回调,当然如果有需要你也可以设置 */
err_code = nrf_drv_gpiote_in_init(PIN_IN, &in_config, NULL);
APP_ERROR_CHECK(err_code);
/* GPIO中断事件使能 */
nrf_drv_gpiote_in_event_enable(PIN_IN, true);
} void spim_init(void)
{
/*不能使用低频引脚,还要配置为高驱*/
nrfx_spim_config_t spi_config = NRFX_SPIM_DEFAULT_CONFIG;
spi_config.ss_pin = 27;
spi_config.miso_pin = 4;//如果是刷屏可以不使用MISO数据pin脚,可以设置为 NRFX_SPIM_PIN_NOT_USED
spi_config.mosi_pin = 5;
spi_config.sck_pin = 26;
spi_config.frequency=NRF_SPIM_FREQ_32M;
APP_ERROR_CHECK(nrfx_spim_init(&my_spi, &spi_config, spi_event_handler, NULL)); /*高驱配置*/
nrf_gpio_cfg(27,
NRF_GPIO_PIN_DIR_OUTPUT,
NRF_GPIO_PIN_INPUT_DISCONNECT,
NRF_GPIO_PIN_NOPULL,
NRF_GPIO_PIN_H0H1,
NRF_GPIO_PIN_NOSENSE);
nrf_gpio_cfg(4,
NRF_GPIO_PIN_DIR_INPUT,
NRF_GPIO_PIN_INPUT_CONNECT,
NRFX_SPIM_MISO_PULL_CFG,
NRF_GPIO_PIN_H0H1,
NRF_GPIO_PIN_NOSENSE);
nrf_gpio_cfg(5,
NRF_GPIO_PIN_DIR_OUTPUT,
NRF_GPIO_PIN_INPUT_DISCONNECT,
NRF_GPIO_PIN_NOPULL,
NRF_GPIO_PIN_H0H1,
NRF_GPIO_PIN_NOSENSE);
nrf_gpio_cfg(26,
NRF_GPIO_PIN_DIR_OUTPUT,
NRF_GPIO_PIN_INPUT_DISCONNECT,
NRF_GPIO_PIN_NOPULL,
NRF_GPIO_PIN_H0H1,
NRF_GPIO_PIN_NOSENSE); NRF_LOG_INFO("SPI init end.");
} void ppi_init(void)
{
ret_code_t err_code; err_code = nrf_drv_ppi_init();
APP_ERROR_CHECK(err_code); /*给spi初始化缓存,并flag选择什么时候启动传输*/
/*NRF_DRV_SPI_FLAG_HOLD_XFER ---- 占时不启用,可在PPI触发下的SPIM的传输*/
err_code = nrfx_spim_xfer(&my_spi,&m_buffer,NRF_DRV_SPI_FLAG_HOLD_XFER);
APP_ERROR_CHECK(err_code); /* 触发的事件地址*/
uint32_t gpio_event_addr = nrfx_gpiote_in_event_addr_get(PIN_IN);
/* 执行的任务地址 */
uint32_t spim_tick_addr = nrfx_spim_start_task_get(&my_spi); /*PPI设置*/
//把PPI的通道1分配出来
err_code = nrf_drv_ppi_channel_alloc(&m_ppi_channel);
APP_ERROR_CHECK(err_code);
/* 关联事件和任务*/
err_code = nrf_drv_ppi_channel_assign(m_ppi_channel,
gpio_event_addr,
spim_tick_addr);
APP_ERROR_CHECK(err_code);
/* 启动PPI*/
err_code = nrf_drv_ppi_channel_enable(m_ppi_channel);
APP_ERROR_CHECK(err_code); } void SPIM_test_init(void)
{
spim_init();
gpiote_init();
ppi_init();
}
2、.h文件
#ifndef SPI_TEST_H__
#define SPI_TEST_H__ void SPIM_test_init(void); #endif
只要在主函数中引用SPIM_test_init();就可以了。
nordic的nrf52系列32M速率的SPI-SPIM3的更多相关文章
- Nordic nRF52系列/nRF5340硬件设计(一)选型及原理图设计
Nordic 的BLE系列芯片从第一代的nRF51系列,到第二代的nRF52系列,发展到目前最新的第三代的nRF5340.目前市场中使用最多的nRF52系列一共有七款芯片,它们是:nRF52805.n ...
- nRF52系列来袭,Nordic的低功耗蓝牙方案大有可为
坐落在北欧的挪威不像他的邻居芬兰那样,可以先后依靠NOKIA和愤怒的小鸟在世界科技界享有盛名.在一般人看来,挪威除了一个逐渐式微的Opera浏览器以外,并没有更多拿得出手的科技企业.而事实证明这只 ...
- nordic——nrf52系列SWD设置回读保护
在开发时可能需要回读保护功能,在产品出厂后这个功能可以让你的代码更加安全,无法用SEGGER或者其余方式读取你的代码HEX文件,也就是禁用SWD下载接口.但是SWD锁住了,还想使用(从新下载代码)也是 ...
- nRF52系列——nRF52832来袭
nRF52系列——nRF52832来袭 Nordic凭借着在无线技术的数十年深耕,推出第一个μBlue芯片-- nRF8001.其低功耗等特性在当时吸引了无数厂商的目光,并将这产品应用到多个领域,再之 ...
- NRF52840相对于之前的NRF52系列、NRF51系列增加了什么功能
现在广大客户的蓝牙采用NORDIC越来越多了,NORDIC一直在不断进行技术改进更好的满足市场需求 推出了新款NRF52840.NRF52840更为先进些,支持的功能也多点,比如IEEE802.15. ...
- Nordic nRF51/nRF52开发环境搭建
本文将详述Nordic nRF51系列(包括nRF51822/nRF51802/nRF51422等)和nRF52系列(包括nRF52832/nRF52810/nRF52840)开发环境搭建. 1. 强 ...
- Nordic nRF51/nRF52开发流程说明
Nordic nRF51系列包括nRF51822/nRF51422/nRF51802等芯片,nRF52系列包括nRF52832/nRF52840/nRF52810等芯片,硬件工程师可以按照如下流程去评 ...
- Nordic NRF51822 从零开始系列(外部设备片—MPU6050DMP驱动的移植)
一.硬件准备 (1)开发板和软件参看 Nordic NRF51822 从零开始系列(一)开发环境的搭建 (2)mpu6050模块 二.前置知识 ...
- Nordic NRF51822 从零开始系列(一)开发环境的搭建
硬件准备 (1)nrf51822 开发板一块(此处使用的是青云系列的,自带jlijnk ob+usb串口芯片)或者使用nrf51822模块+jlink_ob ( ...
- 【Dubbo源码阅读系列】之 Dubbo SPI 机制
最近抽空开始了 Dubbo 源码的阅读之旅,希望可以通过写文章的方式记录和分享自己对 Dubbo 的理解.如果在本文出现一些纰漏或者错误之处,也希望大家不吝指出. Dubbo SPI 介绍 Java ...
随机推荐
- redis集群:MASTER aborted replication with an error: NOAUTH Authentication required.
发现个问题:redis集群所在服务器,磁盘空间很快就被占满,使用 "du -sh *"查看每个文件夹的大小,发现redis集群三个从节点的日志文件占用空间很大. 下面记录问题排查及 ...
- C++欧几里得算法求最大公约数和最小公倍数
定义 最大公约数即为 Greatest Common Divisor,常缩写为 gcd. 一组整数的公约数,是指同时是这组数中每一个数的约数的数. 一组整数的最大公约数,是指所有公约数里面最大的一个. ...
- java实现的类似于sql join操作的工具类,通用递归,最低需要java8
直接上代码,缺包的自行替换为自己项目中存在的 import java.util.ArrayList; import java.util.Collection; import java.util.Has ...
- PHP写一个 Api接口需要注意哪些?考虑哪些?
随着互联网的飞速发展,前后端分离的开发模式越来越流行.编写一个稳定.可靠和易于使用的 API 接口是现代互联网应用程序的关键.本文将介绍在使用 thinkphp6 框架开发 API 接口时需要注意的要 ...
- Hadoop环境安装与配置
1.基础操作系统环境安装(略) 2.JDK的安装与配置 当前各大数据软件如Hadoop等,仍然停留在Java 8上,在本实验选用的是Java 8.在自己的Linux系统中,jdk可以使用如下命令进行一 ...
- vue2实现饼图Pie组件封装
实现如下效果: 效果展示:https://code.juejin.cn/pen/7226656439941955644 如果不会请移步到官网的栗子,请点击查看 直接给大家上代码: 整体代码片段 1 & ...
- 5.go语言函数提纲
1 本篇前瞻 前端时间的繁忙,未曾更新go语言系列.由于函数非常重要,为此将本篇往前提一提,另外补充一些有关go新版本前面遗漏的部分. 需要恭喜你的事情是本篇学完,go语言中基础部分已经学完一半,这意 ...
- python系列:argparse详解 外部传参给python的库
一.argparse简介 argparse 模块是 Python 内置的用于命令项选项与参数解析的模块,argparse 模块可以让人轻松编写用户友好的命令行接口,能够帮助程序员为模型定义参数. ar ...
- Tarjan强连通分量详解
1.简介: 在阅读下列内容之前,请务必了解 图论相关概念 中的基础部分. 强连通的定义是:有向图 G 强连通是指,G 中任意两个结点连通. 强连通分量(Strongly Connected Compo ...
- Java 魔法值处理的四种方法
Java 魔法值处理方案 魔法值的定义 方法一 静态常量(不推荐) 方法二 接口中定义 方法三 定义在实体类 方法四 使用枚举类 enum 总结 魔法值的定义 魔法值是Java中突兀出现在代码中的常量 ...