On the Optimization of Deep Networks: Implicit Acceleration by Overparameterization
引
我很喜欢这一篇文章,因为证明用到的知识并不难,但是却用的很巧,数学真是太牛了,这些人的嗅觉怎么这么好呢?
这篇文章,归根结底就是想说明一个问题,就是和一般的认知不同,随着神经网络的加深,参数更新的收敛速度并不会下降,感觉也有很多论文论述了深度depth的重要性.
不过,这篇文章,是在线性神经网络上做的一个分析,另外,标题中的Acceleration并没有很好的理论支撑,作者给出了几个特例和一些实验论据。我想作者肯定尝试过,但是想要证明想想就不易,至少得弄出个\(O(T^?)\)之类的.
虽然理论支撑不够,但是我感觉还是很厉害了.
主要内容
首先,为了排除一些干扰因素,就是Acceleration来自于俩个网络的表达能力不同,神经网络\(N_1,N_2\), 如果二者的收敛速度不同,原因可能是\(N_1\)和\(N_2\)能让损失下降的程度不同. 而在线性网络中,层数增加并不会改变网络的表达能力.
\(L(W)\)是关于\(W\in \R^{k\times d}\)的损失函数,这个网络的表达能力和\(L(W_NW_{N-1}\cdots W_1)\)的表达能力是相同的,如果\(W_NW_{N-1}\cdots W_1\in \R^{k \times d}\).
对上面的结论,有一点点存疑,假设后者的最优为\((W_N^*, W_{N-1}^*,\ldots,W_1^*)\),那么只要让\(W=W_N^* W_{N-1}^*\cdots W_1^*\)即可,所以\(L(W^*)\le L(W_N^* W_{N-1}^*\cdots W_1^*)\).
反过来似乎不一定,假设\(N=2\), \(W_2 \in \R^{k \times 1}, W_1 \in \R^{1 \times d}\), 但是利用here的结果,只要\(W_i\in \R^{d_i \times d_{i-1}}\), 满足\(d_i \ge \min \{k, d\}\)且\(L\)关于\(W\)为凸函数,就能说明等价. 居然还用上了之前看过的结果.
符号可能有点多,尽可能简化点吧. \(x \in \R^d\)为样本,\(y\in R^k\)为输出,
\]
显然\(n_N=k,n_0=d\). 假设\(L^N(\cdot)\)是关于\((W_N,W_{N-1},\cdots, W_1)\)的函数, 可得
\]
不要觉得这么做多此一举,不然后面证明的时候会弄乱的.
梯度下降采用了类似momentum的感觉,但是又有点不一样:
\]
\(\eta>0\)的学习率,\(\lambda \ge 0\)是权重的递减系数.
定义
\]
故\(L^N(W_N,\ldots,W_1)=L^1(W_e)\).
作者假设\(\eta\),也就是学习率是一个小量,所以上面的式子可以从微分方程的角度去看
\]
怎么说呢,这个所以,我的理解是\(\eta\)很小的时候,\(W_j(t)\)很平缓,所以可以认为导数和\(\Delta t=1\)的时候是一样的?
看了之前有一篇类似的Oja'rule也用了这种方法,感觉作者的意思应该是如果:
\]
此时,
{W}_j(t+\eta) &= W(t)-[\lambda W_j(t) + \frac{\partial L^N}{\partial W_j}(W_1^{(t)},\ldots,W_N^{(t)})]\eta+O(\eta^2)\\
&\approx(1-\eta \lambda)W_j^{(t)} - \eta \frac{\partial L^N}{\partial W_j}(W_1^{(t)},\ldots,W_N^{(t)}).
\end{array}
\]
我觉得应该是这个样子的,不过对于最后的结果没有影响.
定理1
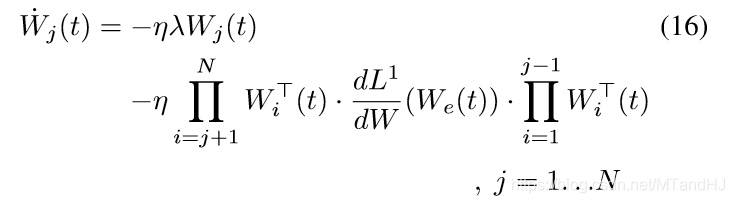
定理1 假设权重矩阵\(W_1, \ldots W_N\)满足微分方程:
\]
且
\]
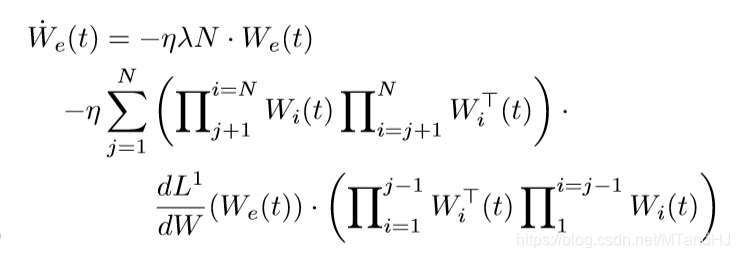
则权重矩阵\(W_e\)的变化满足下列微分方程:
\dot{W_e}(t) = & \eta \lambda N \cdot W_e(t) \\
& - \eta \sum_{j=1}^N [W_e(t) W_e^T(t)]^{\frac{j-1}{N}} \cdot \\
& \quad \frac{\mathrm{d}L^1}{\mathrm{d}W}(W_e(t))\cdot [W_e^T(t)W_e(t)]^{\frac{N-j}{N}}.
\end{array}
\]
其中\([\cdot]^{\frac{q}{p}}\)是关于半正定矩阵的一个定义,假如:
\]
对角矩阵\(D^{\frac{q}{p}}\)是让对角线元素的\(D_{ii}^{\frac{q}{p}}\).
所以,权重\(W_e\)的更新变换近似于:
{W_e}(t+1) = & (1-\eta \lambda N) \cdot W_e(t) \\
& - \eta \sum_{j=1}^N [W_e(t) W_e^T(t)]^{\frac{j-1}{N}} \cdot \\
& \quad \frac{\mathrm{d}L^1}{\mathrm{d}W}(W_e(t))\cdot [W_e^T(t)W_e(t)]^{\frac{N-j}{N}}.
\end{array}
\]
Claim 1
上面的更新实际上让人看不出一个所以然来,所以作者给出了一个向量形式的更新方式,可以更加直观地展现其中地奥秘.
Claim 1 对于任意矩阵\(A\), 定义\(vec(A)\)为由矩阵\(A\)按列重排后的向量形式. 于是,

其中\(P_{W_e^{(t)}}\)是一个半正定矩阵,依赖于\(W_e\), 假设
\]
其中\(U = [u_1,u_2, \ldots,u_k]\in \R^{k \times k}, V=[v_1,v_2,\ldots,v_d] \in \R^{d \times d}\), \(D\)的对角线元素,即\(W_e^{(t)}\)的奇异值从大到小为\(\sigma_1,\sigma_2,\ldots, \sigma_{\max \{k, d\}}\), 则\(P_{W_e^{(t)}}\)的特征向量和对应的特征值为:
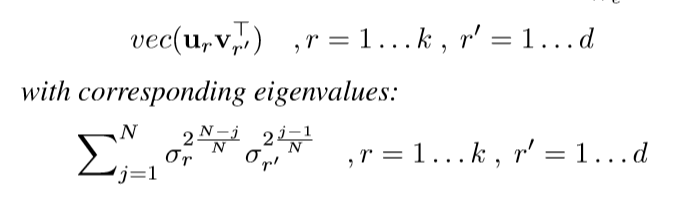
这说明了什么呢?也就是overparameterization后的更新,\(W_e^{(t+1)}\)的更新,也就是\(vec(W_e
^{(t+1)})\)的更新倾向于\(vec(u_1v_1^{T})\), 感觉这一点就和一些梯度下降方法的思想有点类似了,借用之前的成果. 而且,这个借用,会有一种坐标之间的互相沟通,一般的下降方法是不具备这一点的.
Claim 2
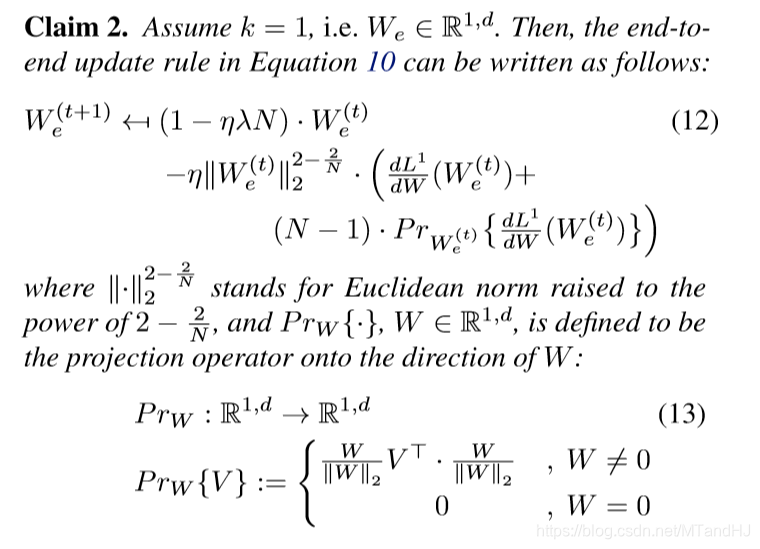
定理2
定理2 假设\(\frac{\mathrm{d}L^1}{\mathrm{d}W}\)在\(W=0\)处有定义,\(W=0\)的某个邻域内连续,那么对于给定的\(N \in \N, N > 2\), 定义:

那么,不存在关于\(W\)的一个函数,其梯度场为\(F\).
定理2的意义在于,它告诉我们,overparameterization的方法是不能通过添加正则项来实现的,因为\(F(W)\)不存在原函数,所以诸如
\]
的操作是不可能实现overparametrization的更新变化的.
证明思路是,构造一个封闭曲线,证明\(F(W)\)在其上的线积分不为0. (太帅了...)
证明
定理1的证明
首先是一些符号:
\prod_{j=a}^b W_j^T := W_a^TW_{a+1}^T \cdots W_b^T
\]
用

表示块对角矩阵.
容易证明(其实费了一番功夫,但是不想写下来,因为每次都会忘,如果下次忘了,就再推一次当惩罚):

于是
第\(j\)个等式俩边右乘\(W_j^T(t)\), 第\(j+1\)个等式俩边左乘\(W_{j+1}^T(t)\)可得:

俩边乘以2
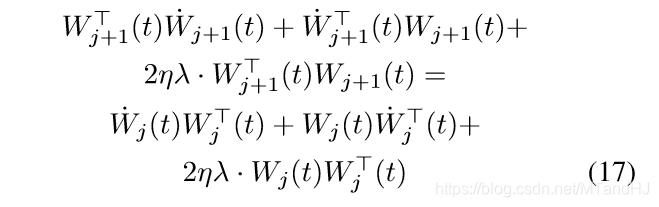
令\(C_j(t):=W_j(t)W_j^T(t), C_j'(t):=W_j^T(t)W_j(t)\), 则

注意,我们将上面的等式改写以下,等价于
\]
用\(y(t):=(C'_{j+1}-C_j)(t)\), 则
\]
另外有初值条件\(y(t_0)=0\)(这是题设的条件).
容易知道,上面的微分方程的解为\(y\equiv0\).
所以
\]
假设\(W_j(t)\)的奇异值分解为
\]
且假设\(\Sigma_j\)的对角线元素,即奇异值是从大到小排列的.
则可得

显然\(\Sigma_{j+1}^T\Sigma_{j+1}=\Sigma_j \Sigma_j^T\), 这是因为一个矩阵的特征值是固定的(如果顺序固定的话),特征向量是不一定的,因为可能有多个相同的特征值,那么对于一个特征值的子空间的任意正交基都可以作为特征向量,也就是说


其中\(I_{d_r} \in \R^{d_r \times d_r}\)是单位矩阵, \(O_{j,r} \in \R^{d_r \times d_r}\)是正交矩阵.
所以对于\(j=1\ldots N-1\), 成立

\(j=N\)有

故
注意,上面的推导需要用到:
\]
既然

那么

上式左端为\(\dot{W}_e(t)\), 于是
再利用(23)(24)的结论

Claim 1 的证明
Kronecker product (克罗内克积)
网上似乎都用\(\otimes\), 不过这里还是遵循论文的使用规范吧, 用\(\odot\)来表示Kronecker product:
\left [
\begin{array}{ccc}
a_{11} \cdot B & \cdots & a_{1n_{a}} \cdot B \\
\vdots & \ddots & \vdots \\
a_{m_a1} \cdot B & \cdots & a_{m_a n_a} \cdot B
\end{array}
\right ] \in \R^{m_am_b \times n_an_b},
\]
其中\(A \in \R^{m_a \times n_a}, B \in \R^{m_b \times n_b}\).
容易证明 \(A \odot B\)的第\(rn_b + s, r = 0, 1, \ldots, n_a-1, s = 0, 1, \ldots, n_b-1\)列为:
\]
其中\(B_{*j}\)表示\(B\)的第\(j\)列, 沿用\(vec(A)\)为\(A\)的列展开. 相应的,\(A \odot B\)的第\(pm_b+q, p=0,1,\ldots,m_a-1,q=0, 1, \ldots, m_b-1\)行为:
\]
其中\(A_{i*}\)表示\(A\)的第\(i\)行.
用\([A\odot B]_{(p,q,r,s)}\)表示\([A \odot B]\)的第\(rn_b+s\)列\(pm_b+q\)行的元素, 则
\]
另外\(I_{d_1} \odot I_{d_2} = I_{d_1d_2}\).
下面再证明几个重要的性质:
\((A_1 \odot A_2)(B_1 \odot B_2) = (A_1 B_1) \odot (A_2B_2)\)
假设\(A_1 \in \R^{m_1 \times l_1}, B_1 \in \R^{l_1 \times n_1}, A_2 \in \R^{m_2 \times l_2}, B_2 \in \R^{l_2 \times n_2}\), 则
\]
考察俩边矩阵的\((pm_2+q,rn_2+s)\)的元素,
[(A_1 \odot A_2)(B_1 \odot B_2)]_{(p,q,r,s)} &= (A_1 \odot A_2)_{pm_2+q*} (B_1 \odot B_2)_{*rn_2+s} \\
&= vec({A_2}_{q+1*}^T{A_1}_{p+1*})^T vec({B_2}_{*s+1}{B_1}_{*r+1}) \\
& = tr({A_1}_{p+1*}^T{A_2}_{q+1*}{B_2}_{*s+1}{B_1}_{*r+1}^T) \\
& = ({A_1}_{p+1*}{B_1}_{*r+1}) ({A_2}_{q+1*}{B_2}_{*s+1}) \\
& = (A_1B_1)_{p+1,r+1} (A_2B_2)_{q+1,s+1} \\
& = [(A_1 B_1) \odot (A_2B_2)]_{(p,q,r,s)}.
\end{array}
\]
得证. 注意,倒数第四个等式到倒数第三个用到了迹的可交换性.
\((A \odot B)^T=A^T \odot B^T\)
[(A \odot B)^T]_{(p, q, r, s)} &= [A \odot B]_{(r, s, p, q)} = a_{r+1,p+1}b_{s+1,q+1} \\
& = a^T_{p+1,r+1}b^T_{q+1,s+1}=[A^T \odot B^T]_{(p,q,r,s)}.
\end{array}
\]
\(A^T=A^{-1},B^T=B^{-1} \Rightarrow (A \odot B)^T = (A \odot B)^{-1}\)
(A \odot B)^T(A \odot B) & = (A^T \odot B^T)(A \odot B) \\
&= (A^TA) \odot (B^TB) \\
&= I_{n_a} \odot I_{n_b} \\
& = I_{n_a n_b},
\end{array}
\]
所以\((A \odot B)^T = (A \odot B)^{-1}\).
回到Claim 1 的证明上来,容易证明

于是
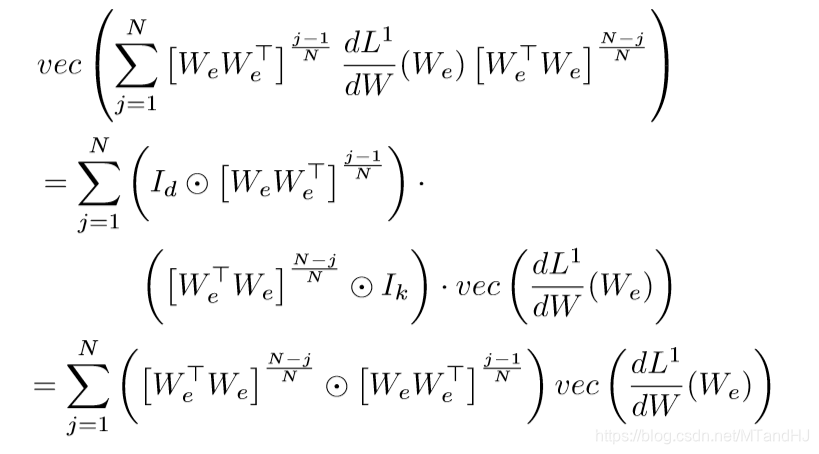
第二个等式用到了\((A_1 \odot A_2)(B_1 \odot B_2) = (A_1 B_1) \odot (A_2B_2)\).
只需要证明:
等价于\(P_{W_e}\). 令
\]
其中\(U \in \R^{k \times k}, V \in \R^{d \times d}\).
所以
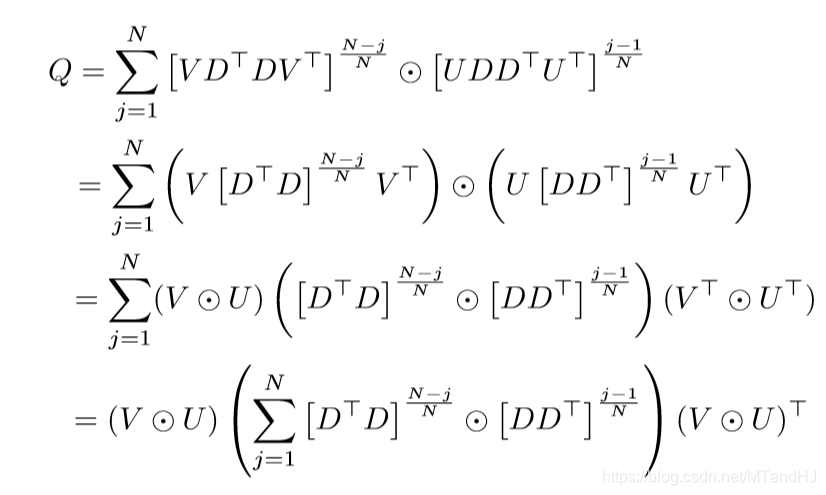
第三个等式用了俩次\((A_1 \odot A_2)(B_1 \odot B_2) = (A_1 B_1) \odot (A_2B_2)\).
定义:
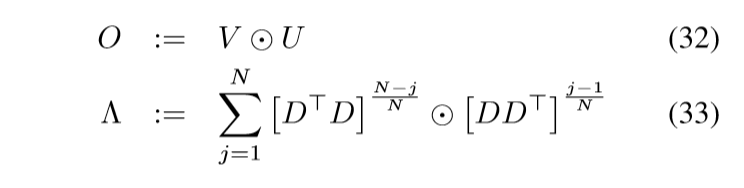
则
\]
剩下的,关于\(O\)的列

\(\Lambda\)的对角元素:

只是一些简单的推导罢了.
Theorem 2 的证明
这个证明我不想贴在这里,因为这个证明我只能看懂,所以想知道就直接看原文吧.
代码
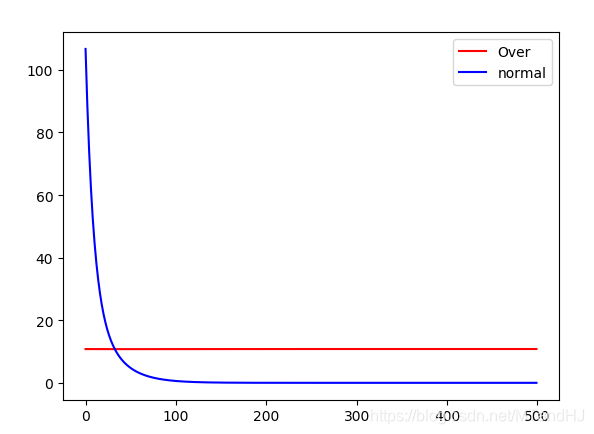
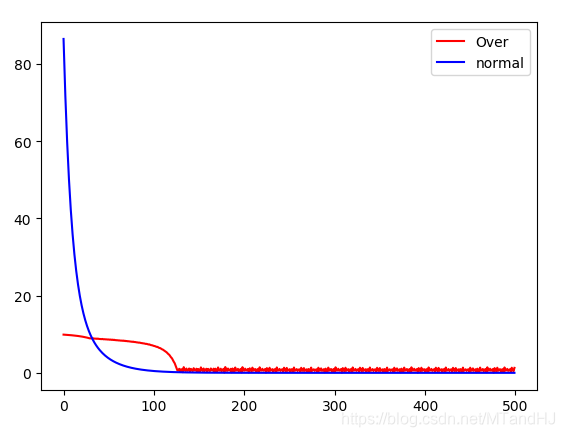
虽然只是用了一个很简单的例子做实验,但是感觉,这个迭代算法很吃初始值. 就像Claim 1 所解释的那样,这个下降方法,会更倾向于之前的方向,也就是之前的错了,后面也会错?
y1设置为100, y2设置为1, lr=0.005, 会出现(也有可能是收敛不到0):
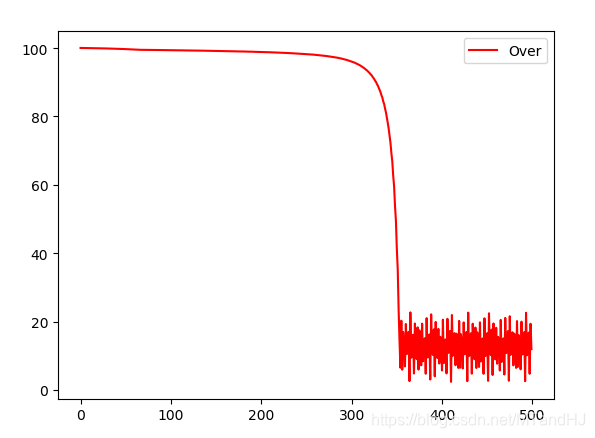
这种下降的方式是蛮恐怖的啊,但是感觉实在是不稳定. 当然,也有可能是程序写的太烂了.
"""
On the Optimization of Deep
Net works: Implicit Acceleration by
Overparameterization
"""
import numpy as np
import torch
import torch.nn as nn
from torch.optim.optimizer import Optimizer, required
class Net(nn.Module):
def __init__(self, d, k):
"""
:param k: 输出维度
:param d: 输入维度
"""
super(Net, self).__init__()
self.d = d
self.dense = nn.Sequential(
nn.Linear(d, k)
)
def forward(self, input):
x = input.view(-1, self.d)
output = self.dense(x)
return output
class Overparameter(Optimizer):
def __init__(self, params, N, lr=required, weight_decay=1.):
defaults = dict(lr=lr)
super(Overparameter, self).__init__(params, defaults)
self.N = N
self.weight_decay = weight_decay
def __setstate__(self, state):
super(Overparameter, self).__setstate__(state)
print("????")
print(state)
print("????")
def step(self, colsure=None):
def calc_part2(W, dw, N):
dw = dw.detach().numpy()
w = W.detach().numpy()
norm = np.linalg.norm(w, 2)
part2 = norm ** (2-2/N) * (
dw +
(N - 1) * (w @ dw.T) * w / (norm ** 2 + 1e-5)
)
return torch.from_numpy(part2)
p = self.param_groups[0]['params'][0]
if p.grad is None:
return 0
d_p = p.grad.data
part1 = (self.weight_decay * p.data).float()
part2 = (calc_part2(p, d_p, self.N)).float()
p.data -= self.param_groups[0]['lr'] * (part1+part2)
return 1
class L4Loss(nn.Module):
def __init__(self):
super(L4Loss, self).__init__()
def forward(self, x, y):
return torch.norm(x-y, 4)
x1 = torch.tensor([1., 0])
y1 = torch.tensor(10.)
x2 = torch.tensor([0, 1.])
y2 = torch.tensor(2.)
net = Net(2, 1)
criterion = L4Loss()
opti = Overparameter(net.parameters(), 4, lr=0.01)
loss_store = []
for epoch in range(500):
running_loss = 0.0
out1 = net(x1)
loss1 = criterion(out1, y1)
opti.zero_grad()
loss1.backward()
opti.step()
running_loss += loss1.item()
out2 = net(x2)
loss2 = criterion(out2, y2)
opti.zero_grad()
loss2.backward()
opti.step()
running_loss += loss2.item()
#print(running_loss)
loss_store.append(running_loss)
net = Net(2, 1)
criterion = nn.MSELoss()
opti = torch.optim.SGD(net.parameters(), lr=0.01)
loss_store2 = []
for epoch in range(500):
running_loss = 0.0
out1 = net(x1)
loss1 = criterion(out1, y1)
opti.zero_grad()
loss1.backward()
opti.step()
running_loss += loss1.item()
out2 = net(x2)
loss2 = criterion(out2, y2)
opti.zero_grad()
loss2.backward()
opti.step()
running_loss += loss2.item()
#print(running_loss)
loss_store2.append(running_loss)
import matplotlib.pyplot as plt
plt.plot(range(len(loss_store)), loss_store, color="red", label="Over")
plt.plot(range(len(loss_store2)), loss_store2, color="blue", label="normal")
plt.legend()
plt.show()
On the Optimization of Deep Networks: Implicit Acceleration by Overparameterization的更多相关文章
- Initialization of deep networks
Initialization of deep networks 24 Feb 2015Gustav Larsson As we all know, the solution to a non-conv ...
- Communication-Efficient Learning of Deep Networks from Decentralized Data
郑重声明:原文参见标题,如有侵权,请联系作者,将会撤销发布! Proceedings of the 20th International Conference on Artificial Intell ...
- Deep Learning 8_深度学习UFLDL教程:Stacked Autocoders and Implement deep networks for digit classification_Exercise(斯坦福大学深度学习教程)
前言 1.理论知识:UFLDL教程.Deep learning:十六(deep networks) 2.实验环境:win7, matlab2015b,16G内存,2T硬盘 3.实验内容:Exercis ...
- 基于pytorch实现HighWay Networks之Train Deep Networks
(一)Highway Networks 与 Deep Networks 的关系 理论实践表明神经网络的深度是至关重要的,深层神经网络在很多方面都已经取得了很好的效果,例如,在1000-class Im ...
- 论文笔记:SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks
SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks 2019-04-02 12:44:36 Paper:ht ...
- 论文笔记:Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks
Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks ICML 2017 Paper:https://arxiv.org/ ...
- 【DeepLearning】Exercise: Implement deep networks for digit classification
Exercise: Implement deep networks for digit classification 习题链接:Exercise: Implement deep networks fo ...
- 深度学习材料:从感知机到深度网络A Deep Learning Tutorial: From Perceptrons to Deep Networks
In recent years, there’s been a resurgence in the field of Artificial Intelligence. It’s spread beyo ...
- Deep Networks for Image Super-Resolution with Sparse Prior
深度学习中潜藏的稀疏表达 Deep Networks for Image Super-Resolution with Sparse Prior http://www.ifp.illinois.edu/ ...
随机推荐
- 25. Linux下gdb调试
1.什么是core文件?有问题的程序运行后,产生"段错误 (核心已转储)"时生成的具有堆栈信息和调试信息的文件. 编译时需要加 -g 选项使程序生成调试信息: gcc -g cor ...
- 一起手写吧!sleep函数!
Async/Await 版本 function sleep(delay) { return new Promise(reslove => { setTimeout(reslove, delay) ...
- Shell学习(十)——du、df命令
一.du 命令 1.命令格式: du [选项][文件] 2.命令功能: 显示每个文件和目录的磁盘使用空间. 3.命令参数: -a或-all 显示目录中个别文件的大小. -b或-bytes 显示目录或文 ...
- Linux下强制踢掉登陆用户
1.pkill -kill -t tty 例:pkill -kill -t tty1
- 【Linux】【Shell】【Basic】Bash
命令历史:shell进程会在其会话中保存此前用户提交执行过的命令: ------------------------------------------------------------------ ...
- Mysql资料 查询SQL执行顺序
目录 一.Mysql数据库查询Sql的执行顺序是什么? 二.具体顺序 一.Mysql数据库查询Sql的执行顺序是什么? (9)SELECT (10) DISTINCT column, (6)AGG_F ...
- Kerboros 认证
转:Kerberos介绍(全)
- GoLang设计模式17 - 访客模式
说明 访客模式是一种行为型设计模式.通过访客模式可以为struct添加方法而不需要对其做任何调整. 来看一个例子,假如我们需要维护一个对如下形状执行操作的库: 方形(Square) 圆形(Circle ...
- CF1119A Ilya and a Colorful Walk 题解
Content 有一个长度为 \(n\) 的数组 \(a_1,a_2,a_3,...,a_n\),试求出两个不相等的数之间的距离的最大值. 数据范围:\(3\leqslant n\leqslant 3 ...
- CF420A Start Up 题解
Content 给定一个长度为 \(n\) 的字符串,求这个字符串整个反转过来后是否和原字符串一样. 数据范围:\(1\leqslant n\leqslant 10^5\). Solution 众所周 ...