第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU、角速度、线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界、虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!!
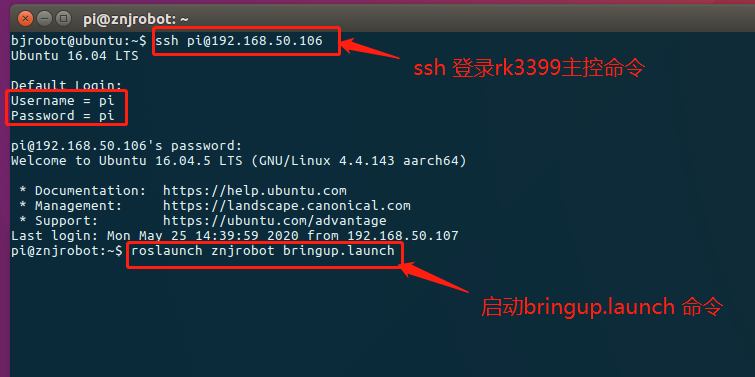
1.把小车平放在你想要构建地图的区域内地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
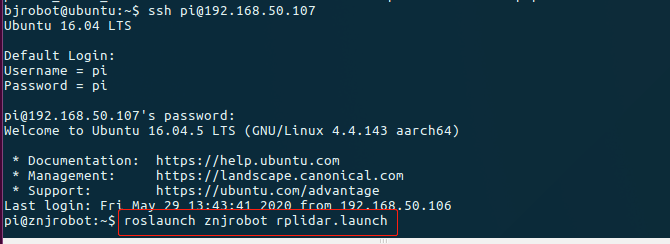
2.在虚拟机端,再打开一个终端,ssh 过去小车主控端启动, roslaunch znjrobot rplidar.launch
3.在虚拟机端,再打开一个终端,ssh 过去小车主控端启动, roslaunch znjrobot cartographer_slam.launch

4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。
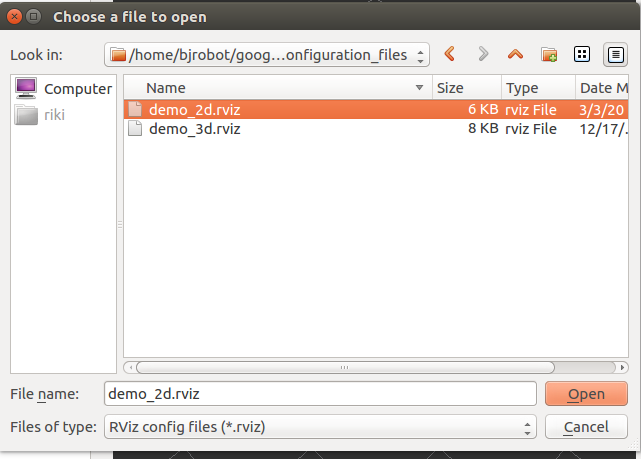
5.全屏化后点击 File,点击 Open Config,
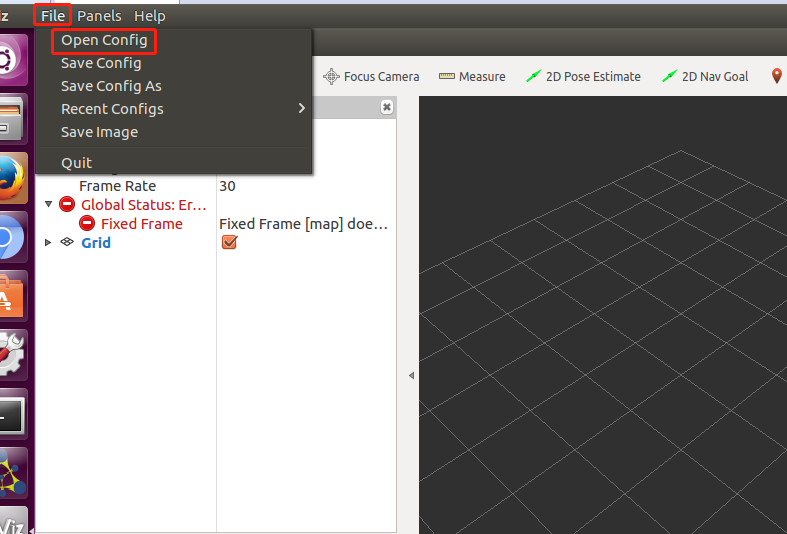
6.找到~/google_ws/install_isolated/share/cartographer_ros/configuration_files/ 路径下,的 demo_2d.rviz 文件。点击 Open。
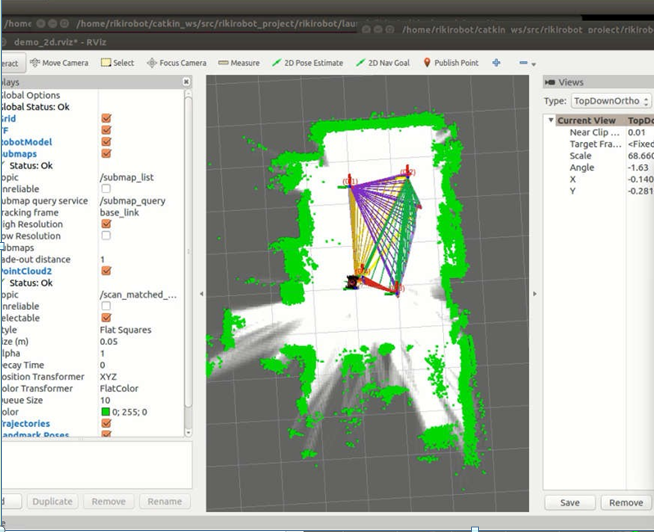
7.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图; 鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。

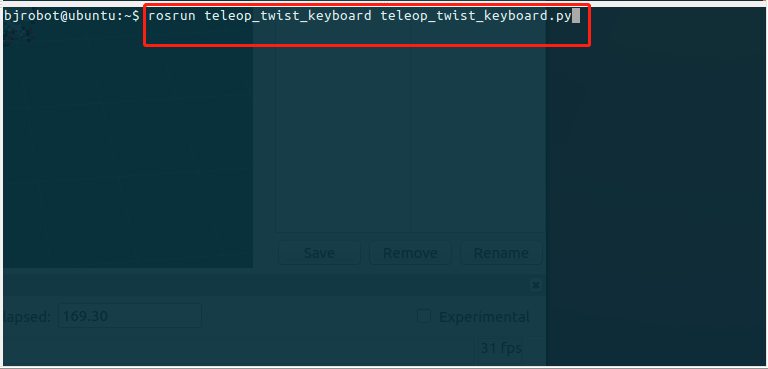
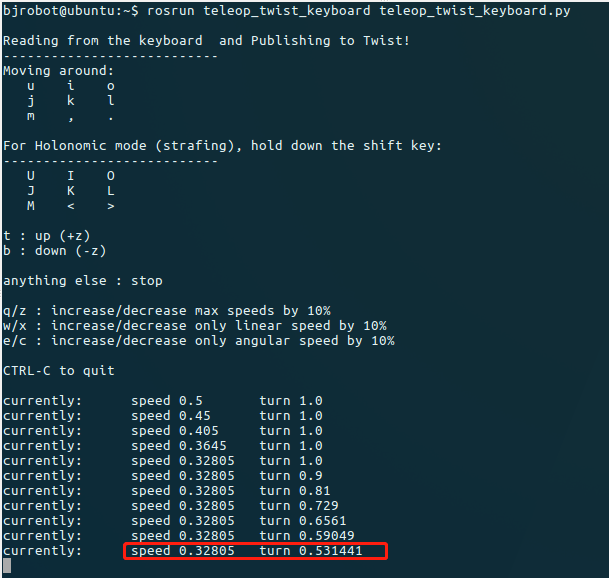
8.在虚拟机端再打开一个终端,直接启动键盘控制 rosrun teleop_twist_keyboard teleop_twist_keyboard.py
把线速度调整到 0.3m/s 左右,把角速度调整到 0.5rad/s 左右。
9.然后用键盘控制小车移动,在该区域内完成扫描建图。
10.在虚拟机端,再打开一个终端,ssh 过去主控端,进入到
~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行 ./cartographer_map.sh 保存地图。
第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
随机推荐
- 第7.7节 案例详解:Python类继承机制
本节实现一个类继承的小程序,下面一边结合代码一边介绍相关继承的知识.例子以车.汽车为例,车为父类.汽车为子类. 一. 定义父类Vehicle class Vehicle(): def __ ...
- mysql-installer-web-community和mysql-installer-communityl两个版本的区别
mysql的官网上提供了两个mysql共享版本的安装,一个20M,一个373.4M.二者的区别是前者是联网安装,当安装时必须能访问互联网,后者是离线安装使用的,一般建议下载离线安装使用的版本. 学Py ...
- 老猿学5G扫盲贴:3GPP中的5G计费架构
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.计费逻辑架构和信息流 在32240子系列文档内 ...
- 老猿学5G随笔:5G系统构成
5G系统(5G智能计费方案)简称5GS,由以下部分组成: 用户设备:User Equipment,简写UE,用户访问网络的设备 5G接入网:5G Access NetWork,简写为5G-AN,负责用 ...
- 第15.38节 PyQt(Python+Qt)入门学习:containers容器类部件QDockWidget停靠窗功能详解
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 一.概述 QDockWidget类提供了一个可以停靠在QMainWin ...
- Monkey的使用
1.进入adb shell 环境 在Windows环境下进入DOS界面,输入adb shell 注意:adb shell服务使用的端口是5037,如果此端口被其他进程占用时,将不能正常启动adb sh ...
- AcWing 404. 婚礼
大型补档计划 题目链接 根据题意,显然只有新郎这边可能存在矛盾,考虑这边怎么放即可,新娘那边的放法与这边正好相反且一一对应. 显然对于两个约束条件是一对矛盾,开始我以为可以用并查集,后来发现输出方案的 ...
- 一、less命令查看日志
查看日志时,一般用less满足大部分的需求. 使用命令格式: less [要查看的文件名] 例如:less LOG.20201211 中间加参数命令格式 less 参数 [要查看的文件名] 例如:查看 ...
- ElasticSearch中head插件的简单用法
1.首先在左侧打开Query栏. 2.Query下方的第一栏是分别输入es的地址.端口号.index.type. 3.Query下方的第二栏是输入将要执行的方式,旁边的下拉框是辅助选择执行的类型,如图 ...
- django配置-mysql数据库相关配置
Django3版本之前的配置 1. Django默认配置的数据库是sqlite 2. 使用mysql数据库需要下载的包 pip3 install PyMySQL 3. Django配置PyMySQL ...