树莓派-4WD智能小车操作小结
树莓派-4WD智能小车操作小结
树莓派4B-4WD智能小车,双层结构,第一层结构为:小车扩展板(底层)+树莓派主板,通过铜柱隔离固定,小车扩展板相当于计算机的外设扩展板;上面一层为第二层,是三个舵机承载板,前部一个舵机,载有彩灯和超声波探测器;后部由垂直和水平两个方向旋转180度的舵机,搭载高清摄像头,负责智慧识别、人脸追踪等功能,需要编程进行训练。
操作方式有三。1.微信小程序,扫二维码(或在微信小程序中搜索智能小车),进入小程序,利用蓝牙,可以控制小车的运动,除了摄像头之外,均可以控制;2.利用APP,扫码下载APP,利用蓝牙,可以像方式1一样控制;如果要控制摄像头和其舵机,则不要开蓝牙,只能链接小车自身的wifi,就可以控制摄像头,将其变成一个监控设备;3.上位机控制,上位机连上小车的wifi,或者将小车插上网线,通过ip扫描软件获取小车的IP。WiFi下默认的小车为192.168.50.1。
在浏览器中输入http://192.168.50.1/,进入树莓派的RaspAP的仪表板,可以进行设置、更新。
用Putty,输入192.168.50.1,可以链接上树莓派的VT终端,进行Linux的操作,树莓派用户名密码是什么呢?root用户密码是什么?普通用户名是:Pi,密码是:raspberry 或者 yahboom,本机采用yahboom为密码;root用户原始系统是没有开启的。开启只要设置了root密码 就可以,开启root的方法如下:sudo passwd root,输入两次密码则可以开启root用户,本人采用raspberry为密码;切换root方法:输入:su,输入密码即可以。
将小车带到空旷的平整地段,进行实际操作。小车前进、左转、右转、后退、停止,巡线、避障、寻光、寻障(跟踪),蜂鸣、救火,舵机控制,摄像及控制,均成功完成。需要注意的是,蓝牙控制,不能离得太远。如果要远距离控制,需要在linux中kill掉蓝牙进程,再用手机APP连接小车的WiFi,进行操作。
锂电池不经用,能否用充电器直接插到小车的扩展板的电源接口呢?我查了充电器的输入是220V,输出是12.6v,800mA;而锂电池的型号是PR12V锂电池组,标称电压是11.1V,充电截止电压是12.6V,容量是2200mAh。
树莓派,接上网线后,是否就是一个能上网、带wifi的路由器呢?因为有一个有线口,一个WIFI,至少可以配成无线路由。
Write by vanjob(一策书·万江波·岳阳)

附件1:安装树莓派的系统到SD卡
准备工作:
1.一张2G以上的SD卡,最好是高速卡,推荐Class4以上的卡,因为卡得速度直接影响树莓派的运行速度
2.下载树莓派debian系统镜像文件 (debian系统镜像下載)
3.winXP和win7下安装镜像的工具 (win32diskimager下載)
安装实战:
1.解压下载的debian系统压缩文件,得到img镜像文件
2.将SD使用卡托或者读卡器后,连上电脑
3.解压并运行win32diskimager工具
4.在软件中选择debain的img文件,“Device”下选择SD的盘符,然后选择“Write”, 如果出现下图的对话框,选“Yes”
然后就开始安装系统了,根据你的SD速度,安装过程有快有慢
5.安装结束后会弹出完成对话框,说明安装就完成了,如果不成功,请关于防火墙一类的软件,重新插入SD进行安装
请注意安装完,win系统下看到SD只有74MB了,这是正常现象,因为linux下的分区win下是看不到的!
大家可以使用分区软件查看SD卡,就能看到linux下的分区了,如下图
Ext3区属于linux的文件系统,就和win的系统盘C盘一样
Swap区为linux的虚拟内存区,主要在物理内存不够用的时候,做缓存用的
安装和启动你的树莓派
准备工作:
1.2G以上安装了树莓派系统的SD卡
2.5V/700mA以上的usb接口电源,推荐用1.5A以上的
3.USB接口的键盘鼠标一套
4.HDMI线,用于接显示器,或者HDMI转VGA的,HDMI转DVI的,主要看你的显示器接口
安装树莓派:
1.先将安装好系统的SD卡插入树莓派
2.再将usb接口的键盘和鼠标接上树莓派
3.接上HDMI线
4.接上电源线,并打开电源
启动树莓派:
1.按照上面的步骤上电后显示器会有文字显示如图,如果显示器没有显示,可能hdmi线或者转接头有问题,请检查
2.正常会停在用户和密码登陆界面(系统是debian),请输入用户名:pi,密码:raspberry ,如果你发现键盘按键没有反应,说明兼容问题,请换键盘试试,
3.步骤1后出现这个界面,可能USB接口电源不足,没法给你的键盘鼠标供电了,请换一个键盘或者配合用带电源的HUB一起使用
4.正确输入用户和密码后,就出现以下界面,说明树莓派已经正常启动了
5.键盘输入“startx”启动图形界面,到此为止你的树莓派就正常启动完成了!
来源:http://www.shumeipai.net
基本使用
如何上网
1.用5V电源加USB转miniusb线连在Raspberry上,用HDMI显示。
2.上电启动后,将网线插入raspberry的卡槽。
3.进入到桌面后,点击桌面上的“LX 终端图标”,进入到系统终端。
4.下面开始介绍如何上网。
上网分两种情况:
自动获取IP:
如果用户上网时自动dhcp获取IP地址,则插上网线后,只要添加dns就可以上网。 修改/etc/resolv.conf设置dns服务器:
pi@raspberrypi ~ $ sudo vim.tiny /etc/resolv.conf
nameserver 8.8.8.8 //在这里添加dns
或者用户还可以选择用gedit修改文件。
pi@raspberrypi ~ $ sudo gedit /etc/resolv.conf
nameserver 8.8.8.8 //在这里添加dns
关于vim的使用方法,用户可参考如下网址。
http://www.cnblogs.com/itech/archive/2009/04/17/1438439.html
静态设置IP:
(a)编辑 /etc/network/interfaces文件。
pi@raspberrypi ~ $ sudo vim.tiny /etc/network/interfaces
将
auto lo
iface lo inet loopback
iface eth0 inet dhcp
修改为:
auto lo
iface lo inet loopback
iface eth0 inet static address 192.168.0.10 //这里根据用户使用的静态IP地址修改。
netmask 255.255.255.0
gateway 192.168.0.1 //这里根据用户使用网关进行修改。
(b)并修改/etc/resolv.conf设置dns服务器:
pi@raspberrypi ~ $ sudo vim.tiny /etc/resolv.conf
nameserver 8.8.8.8 //在这里添加dns
(c)执行下面两个命令,启用新设置
pi@raspberrypi ~ $ sudo ifdown eth0
pi@raspberrypi ~ $ sudo ifup eth0//在这里添加dns
(d)验证是否能够上网,如果能够ping通百度,则说明能够上网。
能够上网的打印信息如下:
pi@raspberrypi ~ $ ping www.baidu.com
PING www.a.shifen.com (220.181.111.147) 56(84) bytes of data.
64 bytes from 220.181.111.147: icmp_req=1 ttl=54 time=167 ms
64 bytes from 220.181.111.147: icmp_req=2 ttl=54 time=77.9 ms
64 bytes from 220.181.111.147: icmp_req=3 ttl=54 time=79.0 ms
64 bytes from 220.181.111.147: icmp_req=4 ttl=54 time=77.9 ms
^C
-- www.a.shifen.com ping statistics ---
4 packets transmitted, 4 received, 0% packet loss, time 3003ms
rtt min/avg/max/mdev = 77.903/100.481/167.041/38.431 ms
如果用户使用的是静态IP,有可能在使用的过程中有可能会断网,而且不能再上网,请用户再重复(b)、(c)、(d)步骤,进行上网验证。
如何玩游戏
用户可以点击桌面图标上的“PythonGames”图标,里面有些小游戏,用户可以根据提示,开始游戏。
如何打字(word,excel类)
用户使用word和excel可以点击桌面图标上的“Libre Office”图标或者用Calligra软件。
如何播放*
标准Raspbian版本中支持树莓派的GPU的播放器好像只有omxplayer,是个命令行程序,没有界面的,也不能拖动。
它有很多参数,最常用的是-o,选项有local和hdmi,表示声音输出到audio out还是hdmi,omxplayer后面跟着要播放的文件名称,不支持wmv,不支持外置字幕。
大部分用X.264编码的1080p视频都可以正常流畅播放。
打开终端窗口,出现提示符后输入:
omxplayer -o hdmi 文件名
当将U盘接入到USB口上,系统默认会在/media目录下创建和硬盘卷标一样的目录,之后就可以在终端访问了。
下面介绍操作步骤:
点击桌面上的“LX 终端”图标,进入到终端。
将U盘插入Raspberry的USB接口,确保U盘里面放入了视频文件。
我们把U盘插入Raspberry的USB接口,它将会在media目录下生成8895-1614,或者其他的文字组合。
pi@raspberrypi ~ $ df -h
显示情况如下
文件系统 容量 已用 可用 已用% 挂载点
rootfs 3.6G 2.5G 948M 73% /
/dev/root 3.6G 2.5G 948M 73% /
tmpfs 19M 232K 19M 2% /run
tmpfs 5.0M 0 5.0M 0% /run/lock
tmpfs 37M 16K 37M 1% /tmp
tmpfs 10M 0 10M 0% /dev
tmpfs 37M 0 37M 0% /run/shm</
附件2:更新树莓派连接wifi
1、打开树莓派浏览器输入 192.168.50.1

输入用户名和密码:admin 密码:yahboom
2、配置WLAN客户端设置

点击进去
3、选择你自己的wifi并输入密码,然后点击添加。
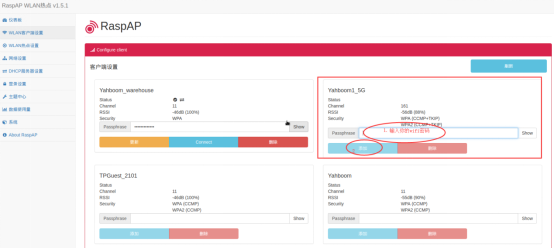
4、点击Connect即可切换wifi
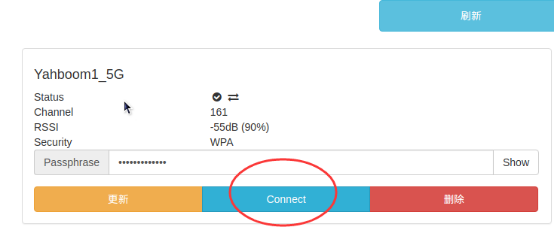
如果搜不到自己的wifi,请点击上方的刷新。
附件3:树莓派常见问题:
1、树莓派用户名密码是什么?root用户密码是什么?
答:用户名是:Pi,密码是:raspberry 或者 yahboom;root用户原始系统是没有开启的。开启只要设置了root密码
就可以,方法如下:sudo passwd root,输入两次密码则可以开启root用户,切换root方法:输入:su,输入密码即可以。
2、SSH如何配置?
答:请参考以下网址:http://www.yahboom.com/build.html?id=1005&cid=159
3、散热片如何安装?
答:请参考以下网址视频:https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-14871668706.32.671745f7gCPzdW&id=555945496136
4、3.5寸屏幕如何安装?烧写镜像白屏怎么回事?
答:请参考以下网址视频:http://www.yahboom.com/study_module/LCD-3.5
请烧写我们最新配置的镜像,LCD35-2018-05-25-raspbian-jessie支持3B+.img
烧写完成后,插入卡,上电需要等待大概10秒才可以启动,不要急于上电后说不能驱动就断电。
5、买的官方系统卡无法进入系统,或者自己内存卡烧写镜像后界面卡在彩色屏幕,或者看见四个树莓派图标在最上面?
答:注意:卡是插在树莓派上的,不是通过读卡器插在树莓派USB口上的!!! 如果买的是3B+板子,官方系统卡还没及时更新,需要亲重新烧录镜像,镜像在提供的百度网盘的3B+目录下,不要进错目录导致相同问题。烧录完镜像不要按照提示又格式化了,这样无法进入系统。
6、树莓派烧录了系统无法通过wifi上网?
答:在你点击wifi那块,其实系统已经提示你要设置地区,所以设置好地区后正常。具体设置方法请百度搜索。
7、树莓派插上网线灯不亮或者无法上网没有ip?
答:灯不亮,先要保证系统能正常启动看到树莓派桌面,或者能远程登录;以上排除后,可以通过命令自己设置有线的ip,输入:ifconfig eth0 down;
ifconfig eth0 up; ifconfig eth0 192.168.1.11(这里ip需要设置跟家里一个网段)。
8、风扇如何插?树莓派亚克力如何安装?
答:请参考淘宝网址视频安装:https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-14871668706.51.671745f7gCPzdW&id=556027301096
9、亚克力安装3.5寸屏幕方法?
答:请参考问题8安装亚克力,不需要装风扇上层盖,插下3.5寸屏幕即可。
10、树莓派灯的状态解释?
答:灯的状态可以不用太关心,只要能进系统就可以,一般是红灯常亮或者灭掉,都是电源正常的,出现闪烁则表示电源供电不足;绿灯只是读写
数据的状态灯,不一定一直闪烁,不用纠结此灯。
11、接电脑显示器或者电视机无显示?
答:最新的3B+必须要装官方的最新系统才可以正常驱动,如果安装了最新注意官方系统有带图形界面的和不带图形界面的,一定要烧写那个带图形
界面的,否则不会出图形界面的。如果还是不行,有可能显示器有问题,有个别人的显示器和树莓派不兼容,无法显示,请修改config文件,具体方法是讲树莓派sd卡拿出来插入电脑,然后用windows的记事本打开编辑,用记事本打开无法编辑的,下载一个vim,就可以直接编辑.
把config.txt修改一下:
【hdmi_safe=1
overscan_left=-30
overscan_right=-30
overscan_top=-30
overscan_bottom=-30
hdmi_group=2
hdmi_mode=4
hdmi_drive=2
config_hdmi_boost=4】
12、树莓派7寸屏非官方屏问题,无法触摸,突然黑屏,无法点亮?
答:注意:由于7寸屏直接接在3B+上USB口电源不足,故要单独接一个充电器才可以正常触摸和显示,注意单独供电的USB不能直接接在电脑USB,
这样可能会控制电脑,不能控制树莓派。无法点亮,背面有个开关需要拨在ON档,烧写系统最好能烧写我们已经配置好的镜像测试。或者烧录原始
镜像并安装我们的驱动即可。
13、树莓派无法 apt-updata 需要更换国内源?
答:请参考此网址修改:https://blog.csdn.net/qq_31324613/article/details/78198484
14、9层亚克力怎么安装?
答:请参考我们官网在线学习安装视频:http://www.yahboom.com/study_module/9acrylic-shell
15、树莓派开机启动项怎么设置?怎么让程序开机自动运行?
答:请进到 /etc 目录下,修改rc.local文件,添加运行的程序即可。
16、树莓派系统安装到SD卡上之后,内存只有几十M?
答:这个属于正常现象,因为linux和windows文件结构不一样,需要看大小,可以用SDFormat格式化后就会恢复到原始大小。需要看真实大小可以在
linux下用命令查看 df -h 查看,也可以恢复空间。扩大SD卡内存简单办法
操作步骤:
先用df -h查看
1、终端输入 sudo raspi-cinfig 进入系统调试界面
2、选择7 Advanced Options 下 1 Expand Filesystem
3、点击确定即可
4、打开文件查看内存卡容量你会有惊喜呦
最后再用df -h查看变化。
17、摄像头无法启动?
答:需要注意官方或者夜视摄像头等非USB接口的摄像头,一定注意插得位置,丝印写的CAMERA,在HDMI接口附近,不能插错位置导致无法启动,摄像头使用方法如下: http://www.yahboom.com/build.html?id=1011&cid=159 注意启动方法里有USB和排线两种启动方式不要搞混了,如果还是不行建议更换USB接口,重新插拔排线或者重启试试。
树莓派-4WD智能小车操作小结的更多相关文章
- 玩转X-CTR100 l STM32F4 l PS2无线手柄-4WD智能小车
我造轮子,你造车,创客一起造起来!更多塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 前面已介绍X-CTR100控制器解码PS2无线手 ...
- 树莓派4B智能小车机器套件——入手组装实验记录
树莓派4B智能小车机器套件--入手组装实验记录 4WD智能小车(4WD SMART ROBOT KIT),支持Arduino.51.STM32.Raspberry Pi等4个版本.本套件采用的是树莓派 ...
- 玩转X-CTR100 l 平台-4WD智能小车
我造轮子,你造车,创客一起造起来!更多塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍使用X-CTR100控制器搭建4WD智能 ...
- Arduino智能小车制作报告
Arduino智能小车制作报告 制作成员:20135224陈实 20135208贺邦 20135207王国伊 前提: Arduino,是一个开源的单板机控制器,采用了基于开放源代码的软硬件平台,构 ...
- 20135223/20135234/20135229小组——亚博 Arduino智能小车实践报告
实验名称:Arduino智能小车组装和综合测试 实验小组成员:20135223何伟钦 20135234马启扬 20135229吕松鸿 实验日期:2015.10.27—2015.11.3 实验时长:24 ...
- 亚博 Arduino智能小车实验报告
亚博 Arduino智能小车实践报告 一. 程序安装准备 首先安装了Arduino板载USB转串口CH340驱动安装包, 若上述程序安装成功,则可以在我的电脑中找到相应的端口 本机端口号为CO ...
- TurnipBit之DIY无线遥控智能小车
一.准备工作 TurnipBit 开发板 2块 TurnipBit 扩展板 1块 数据线 1条 智能小车器件 1套 电机驱动模块(L298N) 1个 在线可视化编程 点击进入 二.思路设计 2 ...
- [MicroPython]TPYBoard智能小车“飞奔的TPYBoard装甲一号”
智能小车作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途.智能小车能够实时显示时间.速度.里程,具有自动寻迹.寻光.避障 ...
- 使用asp.net core 3.0 搭建智能小车2
上一篇中我们把基本的运行环境搭建完成了,这一篇中,我们实战通过树莓派B+连接HC-SR04超声波测距传感器,用c# GPIO控制传感器完成距离测定,并将距离显示在网页上. 1.HC-SR04接线 传感 ...
随机推荐
- js原生方法filter实现
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- bootstrap table 控制checkbox在某些状态不显示
首先columns:[{field:'column',checkbox:true}];然后设置$("#tableName").bootstrapTable('hideColumn' ...
- TMOOC-1709-小明复仇
题目描述 小明所在的世界上一共有n个城市,城市间有m条双向道路.小明现在在城市1,他想到位于城市n的小韩隆家询问他为什么没有将自己的五三复原完成.由于小韩隆手下有许多小弟,小明担心自己可能再也回不来, ...
- AcWing 332. 股票交易
大型补档计划 题目链接 \(f[i][j]\) 表示前 \(i\) 天,手里有 \(j\) 个股票挣得最多钱 买股票.枚举 \(u < i - W\) \(f[i][j] = max(f[u][ ...
- 助力用户选择更优模型和架构,推动 AI机器视觉落地智能制造
智能制造的全新 "视界" 由互联网大潮掀起的技术进步,推动着智能制造成为传统制造行业面向未来.寻求突破的关键路径.通过融合机器人.大数据.云计算.物联网以及 AI 等多种技术, ...
- git学习——git命令之创建版本库和版本退回
原文来至 一.创建版本库 版本库又名仓库,英文名repository,你可以简单理解成一个目录,这个目录里面的所有文件都可以被Git管理起来,每个文件的修改.删除,Git都能跟踪,以便任何时刻都可以追 ...
- Zabbix 新版微信告警-转载
Zabbix 新版微信告警 Zabbix可以通过多种方式把告警信息发送到指定人,常用的有邮件,短信报警方式,但是越来越多的企业开始使用zabbix结合微信作为主要的告警方式,这样可以及时有效的把告警信 ...
- STL—— 容器(vector)的各种功能方法
1. 获取容器的元素个数 size() 使用 vectorName.size() 可以输出这个容器中类型的个数,如下代码: 1 #include <iostream> 2 #include ...
- 情话爬虫工具[windows版]
有没有在气氛暧昧的情况下想说点什么却又无话可说?女朋友有没有抱怨过你,只会写代码,一点都不懂情调?这次,是时候要改变她对你的看法了!一键爬取情话,情话全都躺在txt里面.想怎么玩就怎么玩!张口一句情话 ...
- 20201213-1 HTML基本标签(一)
> HTML 基本结构 <> </> 标签对 > 一个 HTML 文档由 4 个基本部分组成: 文档声明:<!DOCTYPE HTML>声明这是一个 ...