浅析 Bigtable 和 LevelDB 的实现
在 2006 年的 OSDI 上,Google 发布了名为 Bigtable: A Distributed Storage System for Structured Data 的论文,其中描述了一个用于管理结构化数据的分布式存储系统 - Bigtable 的数据模型、接口以及实现等内容。
![]()
本文会先对 Bigtable 一文中描述的分布式存储系统进行简单的描述,然后对 Google 开源的 KV 存储数据库 LevelDB 进行分析;LevelDB 可以理解为单点的 Bigtable 的系统,虽然其中没有 Bigtable 中与 tablet 管理以及一些分布式相关的逻辑,不过我们可以通过对 LevelDB 源代码的阅读增加对 Bigtable 的理解。
Bigtable
Bigtable 是一个用于管理结构化数据的分布式存储系统,它有非常优秀的扩展性,可以同时处理上千台机器中的 PB 级别的数据;Google 中的很多项目,包括 Web 索引都使用 Bigtable 来存储海量的数据;Bigtable 的论文中声称它实现了四个目标:

在作者看来这些目标看看就好,其实并没有什么太大的意义,所有的项目都会对外宣称它们达到了高性能、高可用性等等特性,我们需要关注的是 Bigtable 到底是如何实现的。
数据模型
Bigtable 与数据库在很多方面都非常相似,但是它提供了与数据库不同的接口,它并没有支持全部的关系型数据模型,反而使用了简单的数据模型,使数据可以被更灵活的控制和管理。
在实现中,Bigtable 其实就是一个稀疏的、分布式的、多维持久有序哈希。
A Bigtable is a sparse, distributed, persistent multi-dimensional sorted map.
它的定义其实也就决定了其数据模型非常简单并且易于实现,我们使用 row、column 和 timestamp 三个字段作为这个哈希的键,值就是一个字节数组,也可以理解为字符串。
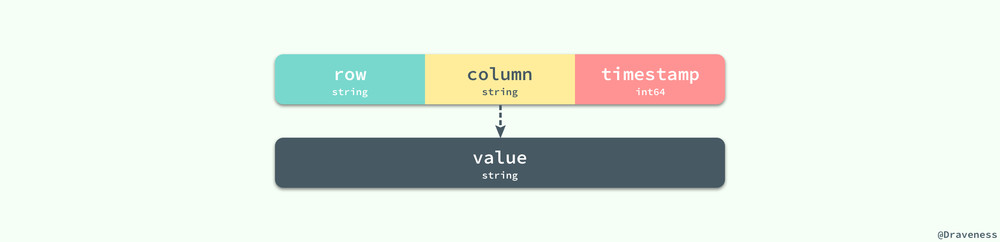
这里最重要的就是 row 的值,它的长度最大可以为 64KB,对于同一 row 下数据的读写都可以看做是原子的;因为 Bigtable 是按照 row 的值使用字典顺序进行排序的,每一段 row 的范围都会被 Bigtable 进行分区,并交给一个 tablet 进行处理。
实现
在这一节中,我们将介绍 Bigtable 论文对于其本身实现的描述,其中包含很多内容:tablet 的组织形式、tablet 的管理、读写请求的处理以及数据的压缩等几个部分。
tablet 的组织形式
我们使用类似 B+ 树的三层结构来存储 tablet 的位置信息,第一层是一个单独的 Chubby 文件,其中保存了根 tablet 的位置。
Chubby 是一个分布式锁服务,我们可能会在后面的文章中介绍它。

每一个 METADATA tablet 包括根节点上的 tablet 都存储了 tablet 的位置和该 tablet 中 key 的最小值和最大值;每一个 METADATA 行大约在内存中存储了 1KB 的数据,如果每一个 METADATA tablet 的大小都为 128MB,那么整个三层结构可以存储 2^61 字节的数据。
tablet 的管理
既然在整个 Bigtable 中有着海量的 tablet 服务器以及数据的分片 tablet,那么 Bigtable 是如何管理海量的数据呢?Bigtable 与很多的分布式系统一样,使用一个主服务器将 tablet 分派给不同的服务器节点。
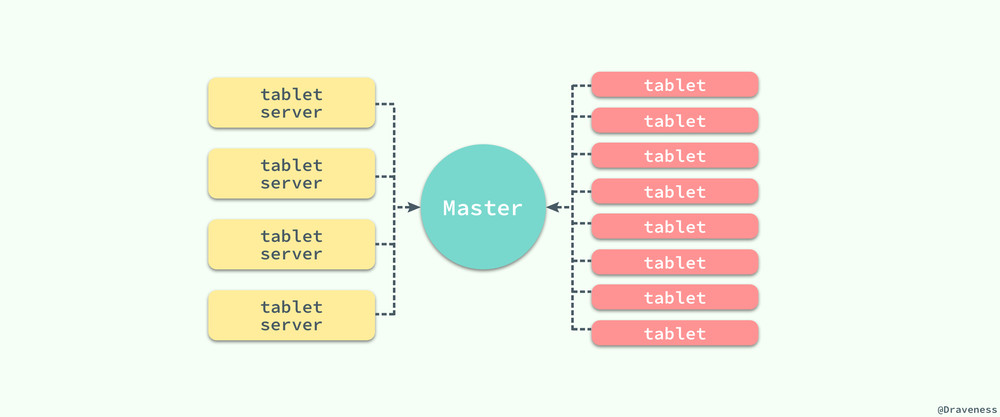
为了减轻主服务器的负载,所有的客户端仅仅通过 Master 获取 tablet 服务器的位置信息,它并不会在每次读写时都请求 Master 节点,而是直接与 tablet 服务器相连,同时客户端本身也会保存一份 tablet 服务器位置的缓存以减少与 Master 通信的次数和频率。
读写请求的处理
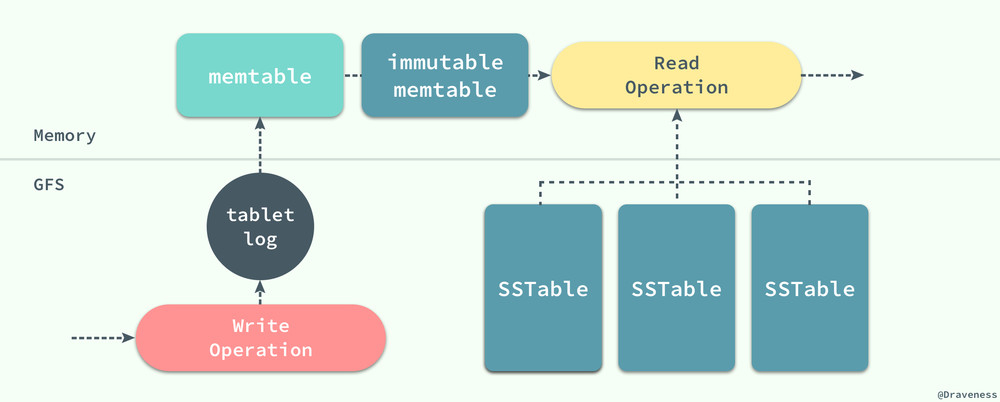
从读写请求的处理,我们其实可以看出整个 Bigtable 中的各个部分是如何协作的,包括日志、memtable 以及 SSTable 文件。

当有客户端向 tablet 服务器发送写操作时,它会先向 tablet 服务器中的日志追加一条记录,在日志成功追加之后再向 memtable 中插入该条记录;这与现在大多的数据库的实现完全相同,通过顺序写向日志追加记录,然后再向数据库随机写,因为随机写的耗时远远大于追加内容,如果直接进行随机写,可能由于发生设备故障造成数据丢失。
当 tablet 服务器接收到读操作时,它会在 memtable 和 SSTable 上进行合并查找,因为 memtable 和 SSTable 中对于键值的存储都是字典顺序的,所以整个读操作的执行会非常快。
表的压缩
随着写操作的进行,memtable 会随着事件的推移逐渐增大,当 memtable 的大小超过一定的阈值时,就会将当前的 memtable 冻结,并且创建一个新的 memtable,被冻结的 memtable 会被转换为一个 SSTable 并且写入到 GFS 系统中,这种压缩方式也被称作 Minor Compaction。
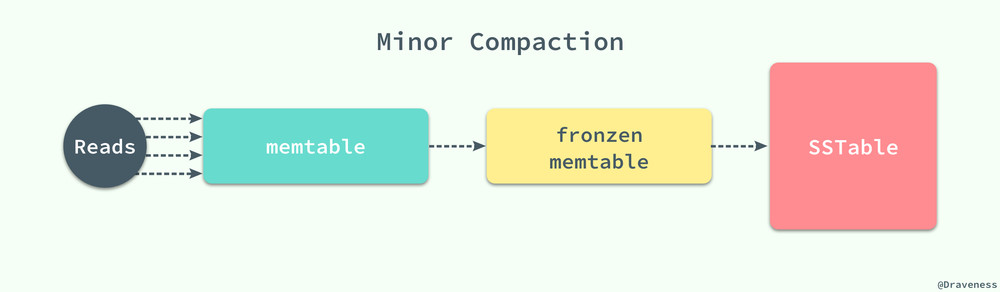
每一个 Minor Compaction 都能够创建一个新的 SSTable,它能够有效地降低内存的占用并且降低服务进程异常退出后,过大的日志导致的过长的恢复时间。既然有用于压缩 memtable 中数据的 Minor Compaction,那么就一定有一个对应的 Major Compaction 操作。
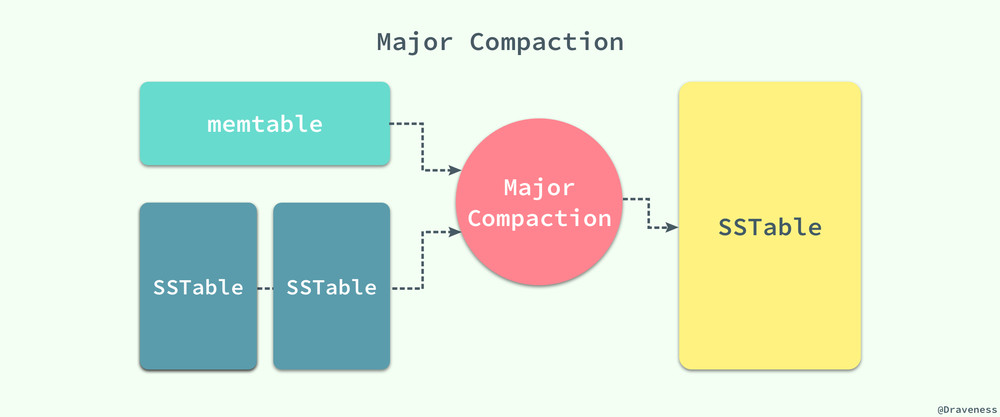
Bigtable 会在后台周期性地进行 Major Compaction,将 memtable 中的数据和一部分的 SSTable 作为输入,将其中的键值进行归并排序,生成新的 SSTable 并移除原有的 memtable 和 SSTable,新生成的 SSTable 中包含前两者的全部数据和信息,并且将其中一部分标记未删除的信息彻底清除。
小结
到这里为止,对于 Google 的 Bigtable 论文的介绍就差不多完成了,当然本文只介绍了其中的一部分内容,关于压缩算法的实现细节、缓存以及提交日志的实现等问题我们都没有涉及,想要了解更多相关信息的读者,这里强烈推荐去看一遍 Bigtable 这篇论文的原文 Bigtable: A Distributed Storage System for Structured Data 以增强对其实现的理解。
LevelDB
文章前面对于 Bigtable 的介绍其实都是对 LevelDB 这部分内容所做的铺垫,当然这并不是说前面的内容就不重要,LevelDB 是对 Bigtable 论文中描述的键值存储系统的单机版的实现,它提供了一个极其高速的键值存储系统,并且由 Bigtable 的作者 Jeff Dean 和 Sanjay Ghemawat 共同完成,可以说高度复刻了 Bigtable 论文中对于其实现的描述。
因为 Bigtable 只是一篇论文,同时又因为其实现依赖于 Google 的一些不开源的基础服务:GFS、Chubby 等等,我们很难接触到它的源代码,不过我们可以通过 LevelDB 更好地了解这篇论文中提到的诸多内容和思量。
概述
LevelDB 作为一个键值存储的『仓库』,它提供了一组非常简单的增删改查接口:
class DB {
public:
virtual Status Put(const WriteOptions& options, const Slice& key, const Slice& value) = 0;
virtual Status Delete(const WriteOptions& options, const Slice& key) = 0;
virtual Status Write(const WriteOptions& options, WriteBatch* updates) = 0;
virtual Status Get(const ReadOptions& options, const Slice& key, std::string* value) = 0;
}
Put方法在内部最终会调用Write方法,只是在上层为调用者提供了两个不同的选择。
Get 和 Put 是 LevelDB 为上层提供的用于读写的接口,如果我们能够对读写的过程有一个非常清晰的认知,那么理解 LevelDB 的实现就不是那么困难了。
在这一节中,我们将先通过对读写操作的分析了解整个工程中的一些实现,并在遇到问题和新的概念时进行解释,我们会在这个过程中一步一步介绍 LevelDB 中一些重要模块的实现以达到掌握它的原理的目标。
从写操作开始
首先来看 Get 和 Put 两者中的写方法:
Status DB::Put(const WriteOptions& opt, const Slice& key, const Slice& value) {
WriteBatch batch;
batch.Put(key, value);
return Write(opt, &batch);
}
Status DBImpl::Write(const WriteOptions& options, WriteBatch* my_batch) {
...
}
正如上面所介绍的,DB::Put 方法将传入的参数封装成了一个 WritaBatch,然后仍然会执行 DBImpl::Write 方法向数据库中写入数据;写入方法 DBImpl::Write 其实是一个是非常复杂的过程,包含了很多对上下文状态的判断,我们先来看一个写操作的整体逻辑:

从总体上看,LevelDB 在对数据库执行写操作时,会有三个步骤:
- 调用
MakeRoomForWrite方法为即将进行的写入提供足够的空间;- 在这个过程中,由于 memtable 中空间的不足可能会冻结当前的 memtable,发生 Minor Compaction 并创建一个新的
MemTable对象; - 在某些条件满足时,也可能发生 Major Compaction,对数据库中的 SSTable 进行压缩;
- 在这个过程中,由于 memtable 中空间的不足可能会冻结当前的 memtable,发生 Minor Compaction 并创建一个新的
- 通过
AddRecord方法向日志中追加一条写操作的记录; - 再向日志成功写入记录后,我们使用
InsertInto直接插入 memtable 中,完成整个写操作的流程;
在这里,我们并不会提供 LevelDB 对于 Put 方法实现的全部代码,只会展示一份精简后的代码,帮助我们大致了解一下整个写操作的流程:
Status DBImpl::Write(const WriteOptions& options, WriteBatch* my_batch) {
Writer w(&mutex_);
w.batch = my_batch;
MakeRoomForWrite(my_batch == NULL);
uint64_t last_sequence = versions_->LastSequence();
Writer* last_writer = &w;
WriteBatch* updates = BuildBatchGroup(&last_writer);
WriteBatchInternal::SetSequence(updates, last_sequence + 1);
last_sequence += WriteBatchInternal::Count(updates);
log_->AddRecord(WriteBatchInternal::Contents(updates));
WriteBatchInternal::InsertInto(updates, mem_);
versions_->SetLastSequence(last_sequence);
return Status::OK();
}
不可变的 memtable
在写操作的实现代码 DBImpl::Put 中,写操作的准备过程 MakeRoomForWrite 是我们需要注意的一个方法:
Status DBImpl::MakeRoomForWrite(bool force) {
uint64_t new_log_number = versions_->NewFileNumber();
WritableFile* lfile = NULL;
env_->NewWritableFile(LogFileName(dbname_, new_log_number), &lfile);
delete log_;
delete logfile_;
logfile_ = lfile;
logfile_number_ = new_log_number;
log_ = new log::Writer(lfile);
imm_ = mem_;
has_imm_.Release_Store(imm_);
mem_ = new MemTable(internal_comparator_);
mem_->Ref();
MaybeScheduleCompaction();
return Status::OK();
}
当 LevelDB 中的 memtable 已经被数据填满导致内存已经快不够用的时候,我们会开始对 memtable 中的数据进行冻结并创建一个新的 MemTable 对象。
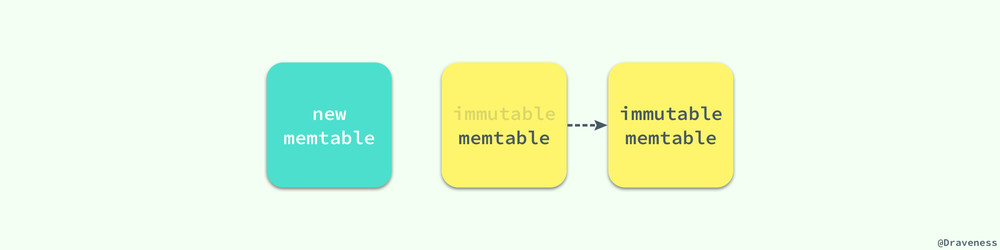
你可以看到,与 Bigtable 中论文不同的是,LevelDB 中引入了一个不可变的 memtable 结构 imm,它的结构与 memtable 完全相同,只是其中的所有数据都是不可变的。
在切换到新的 memtable 之后,还可能会执行 MaybeScheduleCompaction 来触发一次 Minor Compaction 将 imm 中数据固化成数据库中的 SSTable;imm 的引入能够解决由于 memtable 中数据过大导致压缩时不可写入数据的问题。
引入 imm 后,如果 memtable 中的数据过多,我们可以直接将 memtable 指针赋值给 imm,然后创建一个新的 MemTable 实例,这样就可以继续接受外界的写操作,不再需要等待 Minor Compaction 的结束了。
日志记录的格式
作为一个持久存储的 KV 数据库,LevelDB 一定要有日志模块以支持错误发生时恢复数据,我们想要深入了解 LevelDB 的实现,那么日志的格式是一定绕不开的问题;这里并不打算展示用于追加日志的方法 AddRecord 的实现,因为方法中只是实现了对表头和字符串的拼接。
日志在 LevelDB 是以块的形式存储的,每一个块的长度都是 32KB,固定的块长度也就决定了日志可能存放在块中的任意位置,LevelDB 中通过引入一位 RecordType 来表示当前记录在块中的位置:
enum RecordType {
// Zero is reserved for preallocated files
kZeroType = 0,
kFullType = 1,
// For fragments
kFirstType = 2,
kMiddleType = 3,
kLastType = 4
};
日志记录的类型存储在该条记录的头部,其中还存储了 4 字节日志的 CRC 校验、记录的长度等信息:
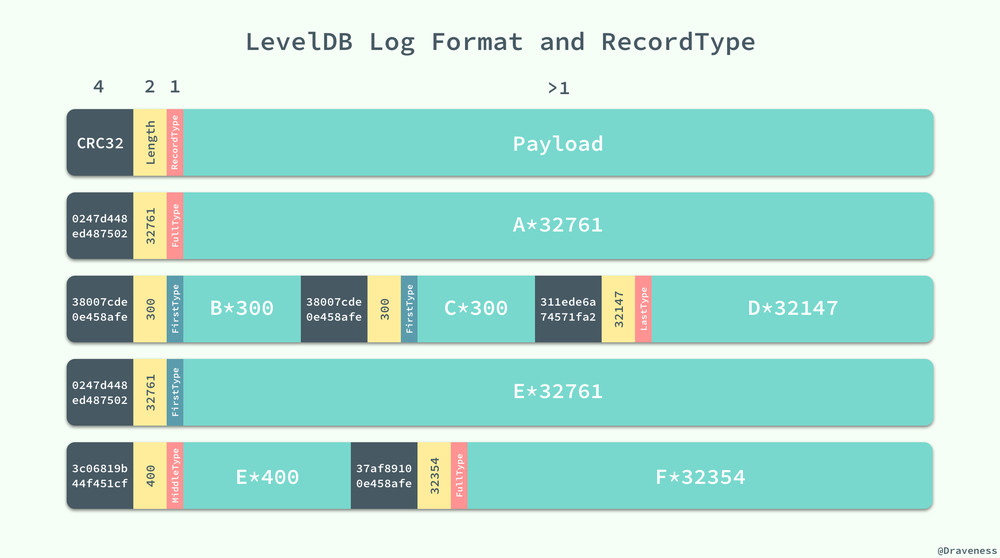
上图中一共包含 4 个块,其中存储着 6 条日志记录,我们可以通过 RecordType 对每一条日志记录或者日志记录的一部分进行标记,并在日志需要使用时通过该信息重新构造出这条日志记录。
virtual Status Sync() {
Status s = SyncDirIfManifest();
if (fflush_unlocked(file_) != 0 ||
fdatasync(fileno(file_)) != 0) {
s = Status::IOError(filename_, strerror(errno));
}
return s;
}
因为向日志中写新记录都是顺序写的,所以它写入的速度非常快,当在内存中写入完成时,也会直接将缓冲区的这部分的内容 fflush 到磁盘上,实现对记录的持久化,用于之后的错误恢复等操作。
记录的插入
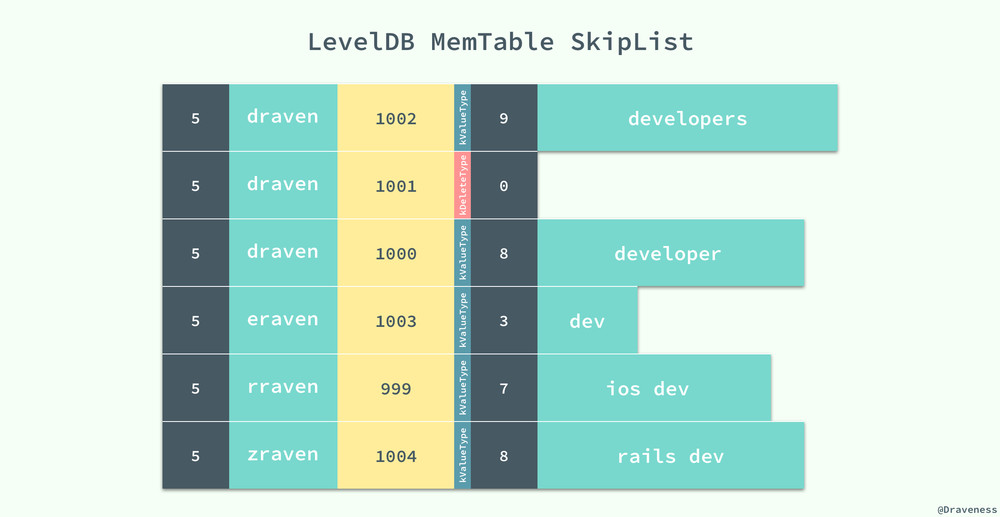
当一条数据的记录写入日志时,这条记录仍然无法被查询,只有当该数据写入 memtable 后才可以被查询,而这也是这一节将要介绍的内容,无论是数据的插入还是数据的删除都会向 memtable 中添加一条记录。
添加和删除的记录的区别就是它们使用了不用的 ValueType 标记,插入的数据会将其设置为 kTypeValue,删除的操作会标记为 kTypeDeletion;但是它们实际上都向 memtable 中插入了一条数据。
virtual void Put(const Slice& key, const Slice& value) {
mem_->Add(sequence_, kTypeValue, key, value);
sequence_++;
}
virtual void Delete(const Slice& key) {
mem_->Add(sequence_, kTypeDeletion, key, Slice());
sequence_++;
}
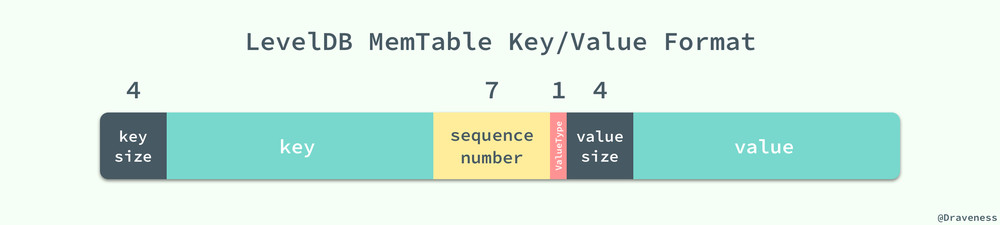
我们可以看到它们都调用了 memtable 的 Add 方法,向其内部的数据结构 skiplist 以上图展示的格式插入数据,这条数据中既包含了该记录的键值、序列号以及这条记录的种类,这些字段会在拼接后存入 skiplist;既然我们并没有在 memtable 中对数据进行删除,那么我们是如何保证每次取到的数据都是最新的呢?首先,在 skiplist 中,我们使用了自己定义的一个 comparator:
int InternalKeyComparator::Compare(const Slice& akey, const Slice& bkey) const {
int r = user_comparator_->Compare(ExtractUserKey(akey), ExtractUserKey(bkey));
if (r == 0) {
const uint64_t anum = DecodeFixed64(akey.data() + akey.size() - 8);
const uint64_t bnum = DecodeFixed64(bkey.data() + bkey.size() - 8);
if (anum > bnum) {
r = -1;
} else if (anum < bnum) {
r = +1;
}
}
return r;
}
比较的两个 key 中的数据可能包含的内容都不完全相同,有的会包含键值、序列号等全部信息,但是例如从
Get方法调用过来的 key 中可能就只包含键的长度、键值和序列号了,但是这并不影响这里对数据的提取,因为我们只从每个 key 的头部提取信息,所以无论是完整的 key/value 还是单独的 key,我们都不会取到 key 之外的任何数据。
该方法分别从两个不同的 key 中取出键和序列号,然后对它们进行比较;比较的过程就是使用 InternalKeyComparator 比较器,它通过 user_key 和 sequence_number 进行排序,其中 user_key 按照递增的顺序排序、sequence_number 按照递减的顺序排序,因为随着数据的插入序列号是不断递增的,所以我们可以保证先取到的都是最新的数据或者删除信息。
在序列号的帮助下,我们并不需要对历史数据进行删除,同时也能加快写操作的速度,提升 LevelDB 的写性能。
数据的读取
从 LevelDB 中读取数据其实并不复杂,memtable 和 imm 更像是两级缓存,它们在内存中提供了更快的访问速度,如果能直接从内存中的这两处直接获取到响应的值,那么它们一定是最新的数据。
LevelDB 总会将新的键值对写在最前面,并在数据压缩时删除历史数据。
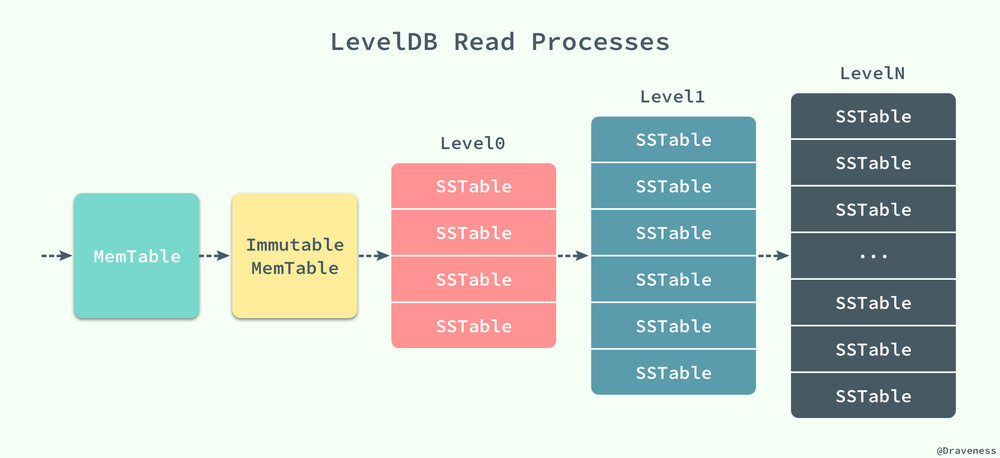
数据的读取是按照 MemTable、Immutable MemTable 以及不同层级的 SSTable 的顺序进行的,前两者都是在内存中,后面不同层级的 SSTable 都是以 *.ldb 文件的形式持久存储在磁盘上,而正是因为有着不同层级的 SSTable,所以我们的数据库的名字叫做 LevelDB。
精简后的读操作方法的实现代码是这样的,方法的脉络非常清晰,作者相信这里也不需要过多的解释:
Status DBImpl::Get(const ReadOptions& options, const Slice& key, std::string* value) {
LookupKey lkey(key, versions_->LastSequence());
if (mem_->Get(lkey, value, NULL)) {
// Done
} else if (imm_ != NULL && imm_->Get(lkey, value, NULL)) {
// Done
} else {
versions_->current()->Get(options, lkey, value, NULL);
}
MaybeScheduleCompaction();
return Status::OK();
}
当 LevelDB 在 memtable 和 imm 中查询到结果时,如果查询到了数据并不一定表示当前的值一定存在,它仍然需要判断 ValueType 来确定当前记录是否被删除。
多层级的 SSTable
当 LevelDB 在内存中没有找到对应的数据时,它才会到磁盘中多个层级的 SSTable 中进行查找,这个过程就稍微有一点复杂了,LevelDB 会在多个层级中逐级进行查找,并且不会跳过其中的任何层级;在查找的过程就涉及到一个非常重要的数据结构 FileMetaData:
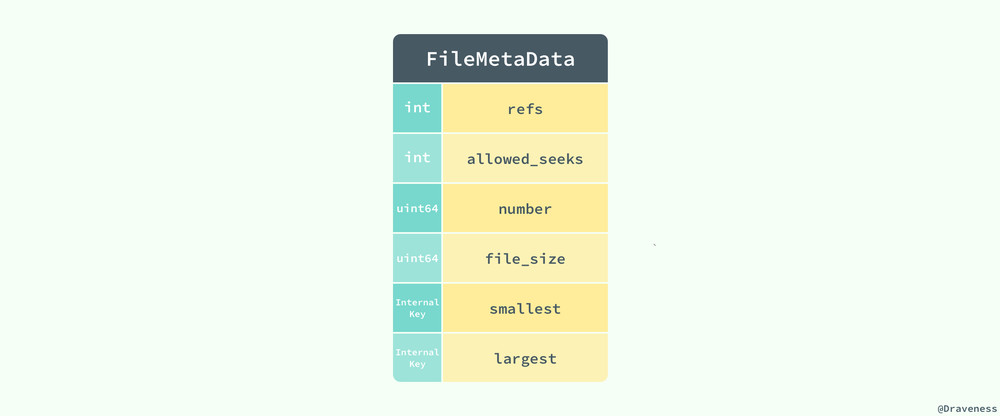
FileMetaData 中包含了整个文件的全部信息,其中包括键的最大值和最小值、允许查找的次数、文件被引用的次数、文件的大小以及文件号,因为所有的 SSTable 都是以固定的形式存储在同一目录下的,所以我们可以通过文件号轻松查找到对应的文件。

查找的顺序就是从低到高了,LevelDB 首先会在 Level0 中查找对应的键。但是,与其他层级不同,Level0 中多个 SSTable 的键的范围有重合部分的,在查找对应值的过程中,会依次查找 Level0 中固定的 4 个 SSTable。
但是当涉及到更高层级的 SSTable 时,因为同一层级的 SSTable 都是没有重叠部分的,所以我们在查找时可以利用已知的 SSTable 中的极值信息 smallest/largest 快速查找到对应的 SSTable,再判断当前的 SSTable 是否包含查询的 key,如果不存在,就继续查找下一个层级直到最后的一个层级 kNumLevels(默认为 7 级)或者查询到了对应的值。
SSTable 的『合并』
既然 LevelDB 中的数据是通过多个层级的 SSTable 组织的,那么它是如何对不同层级中的 SSTable 进行合并和压缩的呢;与 Bigtable 论文中描述的两种 Compaction 几乎完全相同,LevelDB 对这两种压缩的方式都进行了实现。
无论是读操作还是写操作,在执行的过程中都可能调用 MaybeScheduleCompaction 来尝试对数据库中的 SSTable 进行合并,当合并的条件满足时,最终都会执行 BackgroundCompaction 方法在后台完成这个步骤。
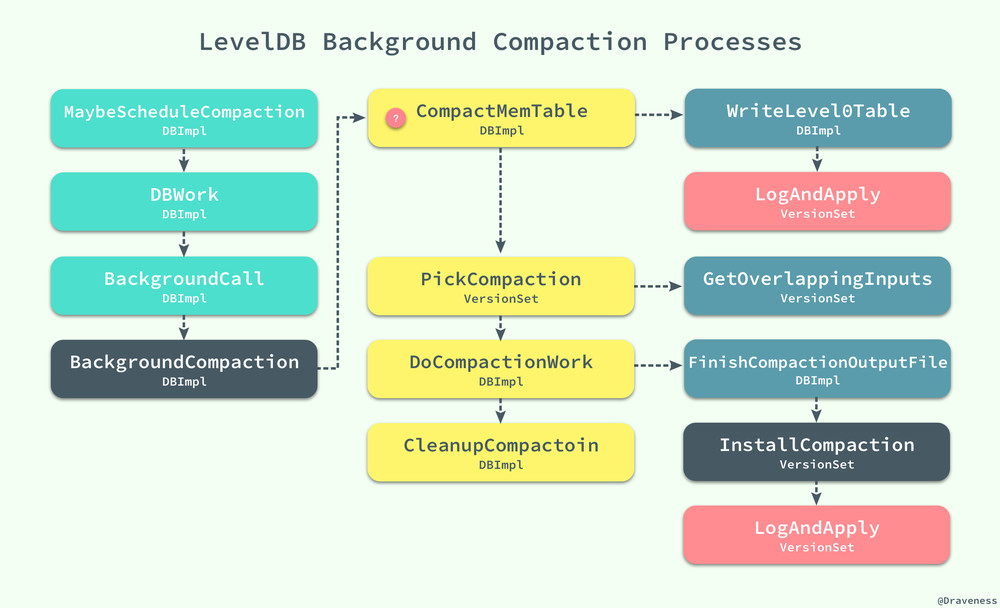
这种合并分为两种情况,一种是 Minor Compaction,即内存中的数据超过了 memtable 大小的最大限制,改 memtable 被冻结为不可变的 imm,然后执行方法 CompactMemTable() 对内存表进行压缩。
void DBImpl::CompactMemTable() {
VersionEdit edit;
Version* base = versions_->current();
WriteLevel0Table(imm_, &edit, base);
versions_->LogAndApply(&edit, &mutex_);
DeleteObsoleteFiles();
}
CompactMemTable 会执行 WriteLevel0Table 将当前的 imm 转换成一个 Level0 的 SSTable 文件,同时由于 Level0 层级的文件变多,可能会继续触发一个新的 Major Compaction,在这里我们就需要在这里选择需要压缩的合适的层级:
Status DBImpl::WriteLevel0Table(MemTable* mem, VersionEdit* edit, Version* base) {
FileMetaData meta;
meta.number = versions_->NewFileNumber();
Iterator* iter = mem->NewIterator();
BuildTable(dbname_, env_, options_, table_cache_, iter, &meta);
const Slice min_user_key = meta.smallest.user_key();
const Slice max_user_key = meta.largest.user_key();
int level = base->PickLevelForMemTableOutput(min_user_key, max_user_key);
edit->AddFile(level, meta.number, meta.file_size, meta.smallest, meta.largest);
return Status::OK();
}
所有对当前 SSTable 数据的修改由一个统一的 VersionEdit 对象记录和管理,我们会在后面介绍这个对象的作用和实现,如果成功写入了就会返回这个文件的元数据 FileMetaData,最后调用 VersionSet 的方法 LogAndApply 将文件中的全部变化如实记录下来,最后做一些数据的清理工作。
当然如果是 Major Compaction 就稍微有一些复杂了,不过整理后的 BackgroundCompaction 方法的逻辑非常清晰:
void DBImpl::BackgroundCompaction() {
if (imm_ != NULL) {
CompactMemTable();
return;
}
Compaction* c = versions_->PickCompaction();
CompactionState* compact = new CompactionState(c);
DoCompactionWork(compact);
CleanupCompaction(compact);
DeleteObsoleteFiles();
}
我们从当前的 VersionSet 中找到需要压缩的文件信息,将它们打包存入一个 Compaction 对象,该对象需要选择两个层级的 SSTable,低层级的表很好选择,只需要选择大小超过限制的或者查询次数太多的 SSTable;当我们选择了低层级的一个 SSTable 后,就在更高的层级选择与该 SSTable 有重叠键的 SSTable 就可以了,通过 FileMetaData 中数据的帮助我们可以很快找到待压缩的全部数据。
查询次数太多的意思就是,当客户端调用多次
Get方法时,如果这次Get方法在某个层级的 SSTable 中找到了对应的键,那么就算做上一层级中包含该键的 SSTable 的一次查找,也就是这次查找由于不同层级键的覆盖范围造成了更多的耗时,每个 SSTable 在创建之后的allowed_seeks都为 100 次,当allowed_seeks < 0时就会触发该文件的与更高层级和合并,以减少以后查询的查找次数。
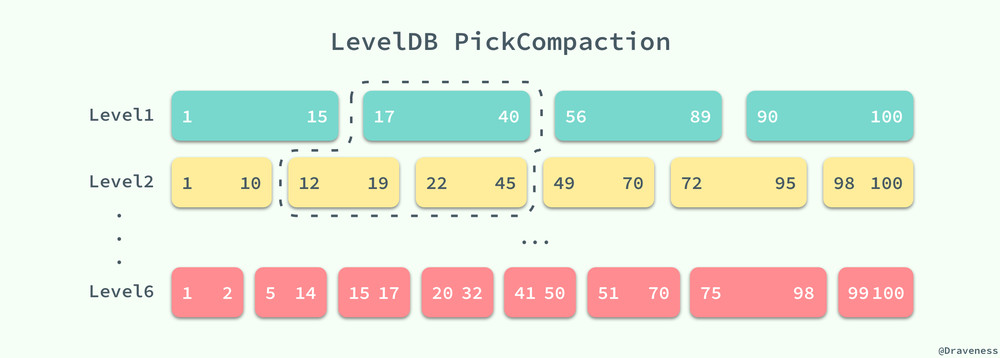
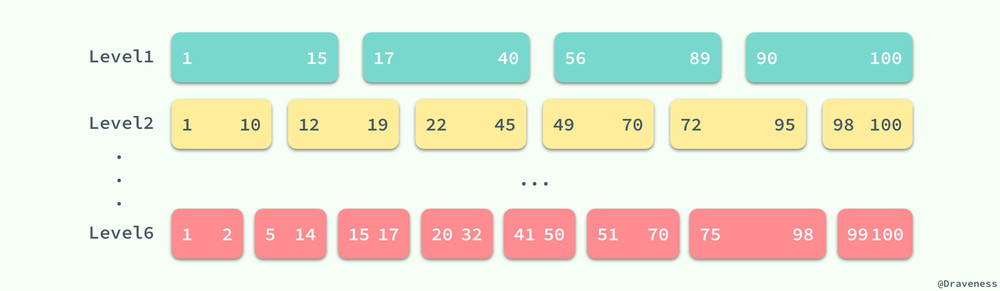
LevelDB 中的 DoCompactionWork 方法会对所有传入的 SSTable 中的键值使用归并排序进行合并,最后会在高高层级(图中为 Level2)中生成一个新的 SSTable。
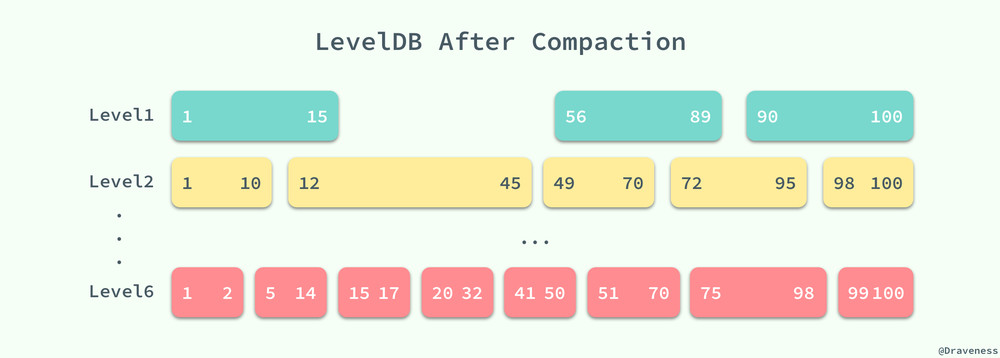
这样下一次查询 17~40 之间的值时就可以减少一次对 SSTable 中数据的二分查找以及读取文件的时间,提升读写的性能。
存储 db 状态的 VersionSet
LevelDB 中的所有状态其实都是被一个 VersionSet 结构所存储的,一个 VersionSet 包含一组 Version 结构体,所有的 Version 包括历史版本都是通过双向链表连接起来的,但是只有一个版本是当前版本。
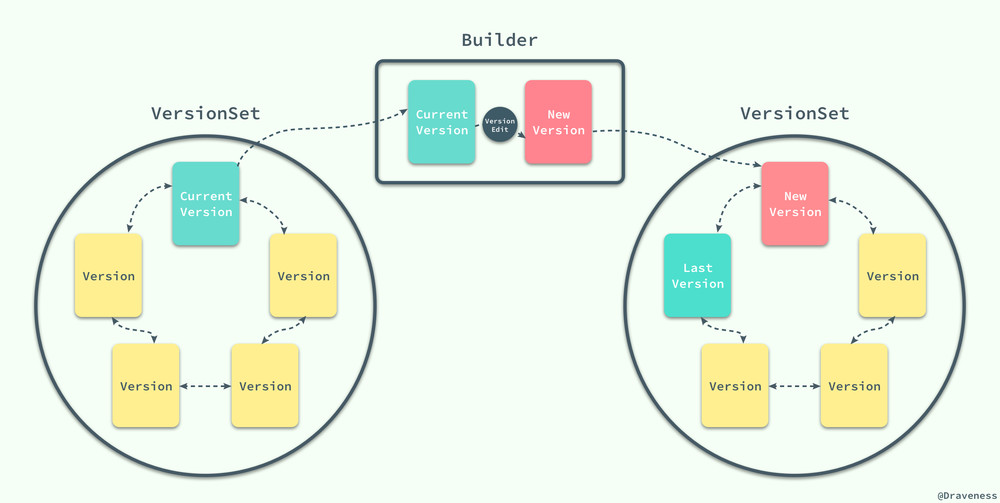
当 LevelDB 中的 SSTable 发生变动时,它会生成一个 VersionEdit 结构,最终执行 LogAndApply 方法:
Status VersionSet::LogAndApply(VersionEdit* edit, port::Mutex* mu) {
Version* v = new Version(this);
Builder builder(this, current_);
builder.Apply(edit);
builder.SaveTo(v);
std::string new_manifest_file;
new_manifest_file = DescriptorFileName(dbname_, manifest_file_number_);
env_->NewWritableFile(new_manifest_file, &descriptor_file_);
std::string record;
edit->EncodeTo(&record);
descriptor_log_->AddRecord(record);
descriptor_file_->Sync();
SetCurrentFile(env_, dbname_, manifest_file_number_);
AppendVersion(v);
return Status::OK();
}
该方法的主要工作是使用当前版本和 VersionEdit 创建一个新的版本对象,然后将 Version 的变更追加到 MANIFEST 日志中,并且改变数据库中全局当前版本信息。
MANIFEST 文件中记录了 LevelDB 中所有层级中的表、每一个 SSTable 的 Key 范围和其他重要的元数据,它以日志的格式存储,所有对文件的增删操作都会追加到这个日志中。
SSTable 的格式
SSTable 中其实存储的不只是数据,其中还保存了一些元数据、索引等信息,用于加速读写操作的速度,虽然在 Bigtable 的论文中并没有给出 SSTable 的数据格式,不过在 LevelDB 的实现中,我们可以发现 SSTable 是以这种格式存储数据的:
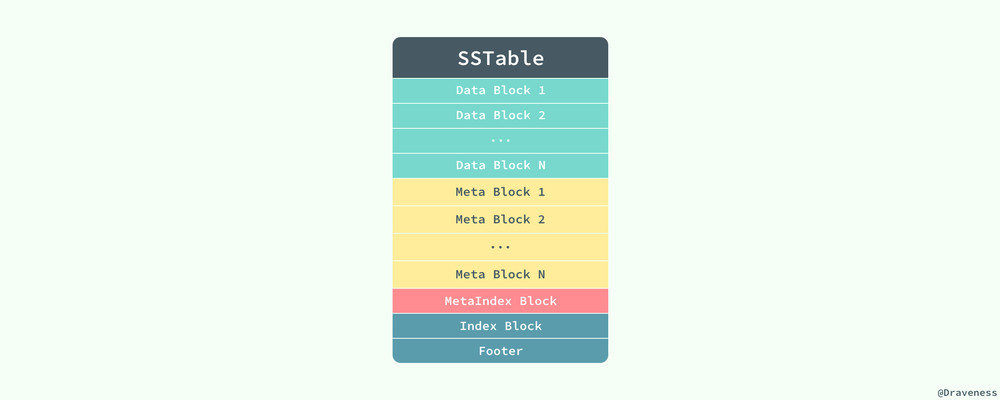
当 LevelDB 读取 SSTable 存在的 ldb 文件时,会先读取文件中的 Footer 信息。

整个 Footer 在文件中占用 48 个字节,我们能在其中拿到 MetaIndex 块和 Index 块的位置,再通过其中的索引继而找到对应值存在的位置。
TableBuilder::Rep 结构体中就包含了一个文件需要创建的全部信息,包括数据块、索引块等等:
struct TableBuilder::Rep {
WritableFile* file;
uint64_t offset;
BlockBuilder data_block;
BlockBuilder index_block;
std::string last_key;
int64_t num_entries;
bool closed;
FilterBlockBuilder* filter_block;
...
}
到这里,我们就完成了对整个数据读取过程的解析了;对于读操作,我们可以理解为 LevelDB 在它内部的『多级缓存』中依次查找是否存在对应的键,如果存在就会直接返回,唯一与缓存不同可能就是,在数据『命中』后,它并不会把数据移动到更近的地方,而是会把数据移到更远的地方来减少下一次的访问时间,虽然这么听起来却是不可思议,不过仔细想一下确实是这样。
小结
在这篇文章中,我们通过对 LevelDB 源代码中读写操作的分析,了解了整个框架的绝大部分实现细节,包括 LevelDB 中存储数据的格式、多级 SSTable、如何进行合并以及管理版本等信息,不过由于篇幅所限,对于其中的一些问题并没有展开详细地进行介绍和分析,例如错误恢复以及缓存等问题;但是对 LevelDB 源代码的阅读,加深了我们对 Bigtable 论文中描述的分布式 KV 存储数据库的理解。
LevelDB 的源代码非常易于阅读,也是学习 C++ 语言非常优秀的资源,如果对文章的内容有疑问,可以在博客下面留言。
Reference
- Bigtable: A Distributed Storage System for Structured Data
- LevelDB
- The Chubby lock service for loosely-coupled distributed systems
- LevelDB · Impl
- leveldb 中的 SSTable
原文链接:浅析 Bigtable 和 LevelDB 的实现 · 面向信仰编程
Follow: Draveness · GitHub
浅析 Bigtable 和 LevelDB 的实现的更多相关文章
- LevelDB,你好~
LevelDB,你好~ 上篇文章初识:LevelDB介绍了啥是LevelDB,LevelDB有啥特性,以及Linux环境下编译,使用及调试方法. 这篇文章的话,算是LevelDB源码学习的开端吧,主要 ...
- MongoDB 入门篇
1.1 数据库管理系统 在了解MongoDB之前需要先了解先数据库管理系统 1.1.1 什么是数据? 数据(英语:data),是指未经过处理的原始记录. 一般而言,数据缺乏组织及分类,无法明确的表达事 ...
- 《大数据日知录》读书笔记-ch3大数据常用的算法与数据结构
布隆过滤器(bloom filter,BF): 二进制向量数据结构,时空效率很好,尤其是空间效率极高.作用:检测某个元素在某个巨量集合中存在. 构造: 查询: 不会发生漏判(false negativ ...
- mongodb入门篇
MongoDB 入门篇 分类: NoSQL, 故障解决 undefined 1.1 数据库管理系统 在了解MongoDB之前需要先了解先数据库管理系统 1.1.1 什么是数据? 数据(英语:data) ...
- 分布式缓存 — MongoDB
--- 数据库管理系统 数据库管理系统主要分为俩大类:RDBMS.NOSQL.在个人电脑.大型计算机和主机上应用最广泛的数据库管理系统是关系型DBMS.NoSQL是对不同于传统的关系数据库的数据库管理 ...
- sstable, bigtable,leveldb,cassandra,hbase的lsm基础
先看懂文献1和2 1. 先了解sstable.SSTable: Sorted String Table [2] [10] WiscKey: 类似myisam, key value分离, 根据ssd优 ...
- LevelDB库简介
LevelDB库简介 一.LevelDB入门 LevelDB是Google开源的持久化KV单机数据库,具有很高的随机写,顺序读/写性能,但是随机读的性能很一般,也就是说,LevelDB很适合应用在查询 ...
- (zz) 谷歌技术"三宝"之BigTable
006年的OSDI有两篇google的论文,分别是BigTable和Chubby.Chubby是一个分布式锁服务,基于Paxos算法:BigTable是一个用于管理结构化数据的分布式存储系统,构建在G ...
- HBase、Redis、MongoDB、Couchbase、LevelDB主流 NoSQL 数据库的对比
最近小组准备启动一个 node 开源项目,从前端亲和力.大数据下的IO性能.可扩展性几点入手挑选了 NoSql 数据库,但具体使用哪一款产品还需要做一次选型. 我们最终把选项范围缩窄在 HBase.R ...
随机推荐
- Python入门:数据结构的4种基本类型
数据结构:通俗点说,就是储存大量数据的容器.这里主要介绍Python的4种基本数据结构:列表.字典.元组.集合. 格式如下: 列表:list = [val1,val2,val3,val4],用中括号: ...
- Open Source CRM
https://www.odoo.com/zh_CN/page/crm 试用: https://none53.odoo.com/web#home https://none.mypscloud.com/ ...
- [转帖]关于网络编程中MTU、TCP、UDP优化配置的一些总结
关于网络编程中MTU.TCP.UDP优化配置的一些总结 https://www.cnblogs.com/maowang1991/archive/2013/04/15/3022955.html 感谢原作 ...
- 使用非服务器磁盘(MBROnly)安装ESXi时的方法.
From ESXi 5.0, if you install ESXi to a empty hard disk, the target disk will be prepared with GPT-b ...
- PLSQL 使用ODBC 数据源导入来自SQLSERVER的数据
1. 创建ODBC数据源 方法: 打开控制命令 Win10 运行->输入 control 查看方式大图标--选择 管理工具 2. 安装了 64位的plsql 应该也选用 64位的ODBC数据源 ...
- 排查mysql innodb Lock wait timeout exceeded; try restarting transaction的问题
OMG写的时候崩溃了一次. 触发关注这个问题的事情是 我们在使用pt-online-schedule 改表的时候总是拿不到锁,并且报出mysql innodb Lock wait timeout ex ...
- linux bin & sbin different
linux bin & sbin different flutter & $PATH http://blog.taylormcgann.com/2014/04/11/differenc ...
- C# 之抽象类和抽象方法
概述:abstract 关键字 抽象类不能被实例化,抽象方法不能有方法体,抽象类中的所有抽象方法必须在子类中重写(override ),一个抽象类可以同时包含抽象方法和非抽象方法. abstract ...
- codeforces510B
Fox And Two Dots CodeForces - 510B Fox Ciel 正在玩一个手机拼图游戏,被称之为 "Two Dots".基础关卡是在一个大小为 n × m的 ...
- BZOJ5338[TJOI2018]xor——主席树+dfs序
题目描述 现在有一颗以1为根节点的由n个节点组成的树,树上每个节点上都有一个权值vi. 现在有Q 次操作,操作如下: 1 x y 查询节点x的子树中与y异或结果的最大值 2 x y z ...