浅谈压缩感知(二十一):压缩感知重构算法之正交匹配追踪(OMP)
主要内容:
- OMP的算法流程
- OMP的MATLAB实现
- 一维信号的实验与结果
- 测量数M与重构成功概率关系的实验与结果
- 稀疏度K与重构成功概率关系的实验与结果
一、OMP的算法流程
二、OMP的MATLAB实现(CS_OMP.m)
function [ theta ] = CS_OMP( y,A,iter )
% CS_OMP
% y = Phi * x
% x = Psi * theta
% y = Phi * Psi * theta
% 令 A = Phi*Psi, 则y=A*theta
% 现在已知y和A,求theta
% iter = 迭代次数
[m,n] = size(y);
if m<n
y = y'; %y should be a column vector
end
[M,N] = size(A); %传感矩阵A为M*N矩阵
theta = zeros(N,); %用来存储恢复的theta(列向量)
At = zeros(M,iter); %用来迭代过程中存储A被选择的列
pos_num = zeros(,iter); %用来迭代过程中存储A被选择的列序号
res = y; %初始化残差(residual)为y
for ii=:iter %迭代t次,t为输入参数
product = A'*res; %传感矩阵A各列与残差的内积
[val,pos] = max(abs(product)); %找到最大内积绝对值,即与残差最相关的列
At(:,ii) = A(:,pos); %存储这一列
pos_num(ii) = pos; %存储这一列的序号
A(:,pos) = zeros(M,); %清零A的这一列,其实此行可以不要,因为它与残差正交
% y=At(:,:ii)*theta,以下求theta的最小二乘解(Least Square)
theta_ls = (At(:,:ii)'*At(:,1:ii))^(-1)*At(:,1:ii)'*y;%最小二乘解
% At(:,:ii)*theta_ls是y在At(:,:ii)列空间上的正交投影
res = y - At(:,:ii)*theta_ls; %更新残差
end
theta(pos_num)=theta_ls;% 恢复出的theta
end
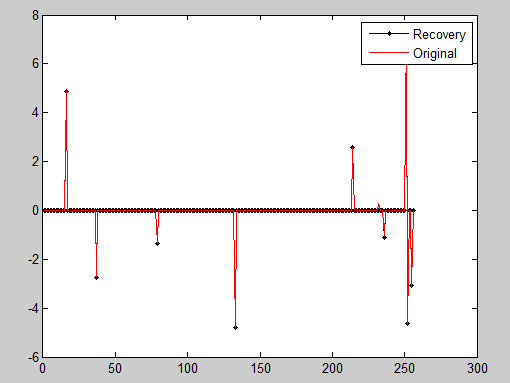
三、一维信号的实验与结果(CS_Reconstuction_Test.m)
%压缩感知重构算法OMP测试
%以一维信号为例
clear all;close all;clc;
M = ;%观测值个数
N = ;%信号x的长度
K = ;%信号x的稀疏度
Index_K = randperm(N);
x = zeros(N,);
x(Index_K(:K)) = *randn(K,);%x为K稀疏的,且位置是随机的
Psi = eye(N);%x本身是稀疏的,定义稀疏矩阵为单位阵,x=Psi*theta
Phi = randn(M,N);%测量矩阵为高斯矩阵
A = Phi * Psi;%传感矩阵
y = Phi * x;%得到观测向量y
%% 恢复重构信号x
tic
theta = CS_OMP(y,A,K);
x_r = Psi * theta;% x=Psi * theta
toc
%% 绘图
figure;
plot(x_r,'k.-');%绘出x的恢复信号
hold on;
plot(x,'r');%绘出原信号x
hold off;
legend('Recovery','Original')
fprintf('\n恢复残差:');
norm(x_r-x)%恢复残差
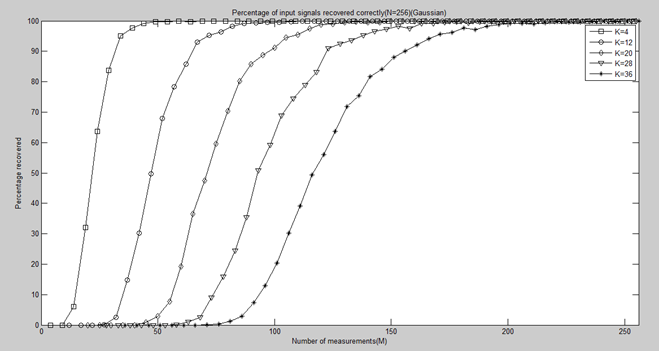
四、测量数M与重构成功概率关系的实验与结果(CS_Reconstuction_MtoPercentage.m)
% 压缩感知重构算法测试CS_Reconstuction_MtoPercentage.m
% 绘制参考文献中的Fig.
% 参考文献:Joel A. Tropp and Anna C. Gilbert
% Signal Recovery From Random Measurements Via Orthogonal Matching
% Pursuit,IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. , NO. ,
% DECEMBER . clear all;close all;clc; %% 参数配置初始化
CNT = ; %对于每组(K,M,N),重复迭代次数
N = ; %信号x的长度
Psi = eye(N); %x本身是稀疏的,定义稀疏矩阵为单位阵x=Psi*theta
K_set = [,,,,]; %信号x的稀疏度集合
Percentage = zeros(length(K_set),N); %存储恢复成功概率 %% 主循环,遍历每组(K,M,N)
tic
for kk = :length(K_set)
K = K_set(kk); %本次稀疏度
M_set = K::N; %M没必要全部遍历,每隔5测试一个就可以了
PercentageK = zeros(,length(M_set)); %存储此稀疏度K下不同M的恢复成功概率
for mm = :length(M_set)
M = M_set(mm); %本次观测值个数
P = ;
for cnt = :CNT %每个观测值个数均运行CNT次
Index_K = randperm(N);
x = zeros(N,);
x(Index_K(:K)) = *randn(K,); %x为K稀疏的,且位置是随机的
Phi = randn(M,N); %测量矩阵为高斯矩阵
A = Phi * Psi; %传感矩阵
y = Phi * x; %得到观测向量y
theta = CS_OMP(y,A,K); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P = P + ;
end
end
PercentageK(mm) = P/CNT*; %计算恢复概率
end
Percentage(kk,:length(M_set)) = PercentageK;
end
toc
save MtoPercentage1000 %运行一次不容易,把变量全部存储下来 %% 绘图
S = ['-ks';'-ko';'-kd';'-kv';'-k*'];
figure;
for kk = :length(K_set)
K = K_set(kk);
M_set = K::N;
L_Mset = length(M_set);
plot(M_set,Percentage(kk,:L_Mset),S(kk,:));%绘出x的恢复信号
hold on;
end
hold off;
xlim([ ]);
legend('K=4','K=12','K=20','K=28','K=36');
xlabel('Number of measurements(M)');
ylabel('Percentage recovered');
title('Percentage of input signals recovered correctly(N=256)(Gaussian)');
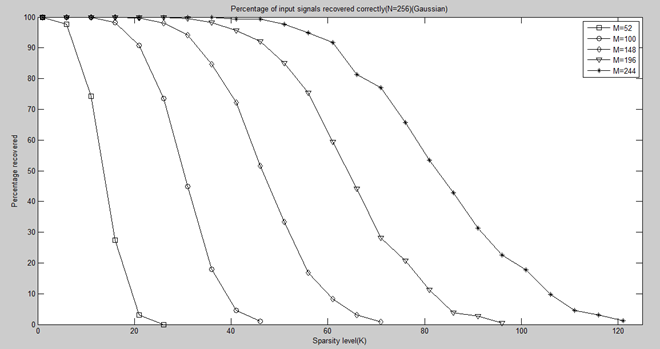
五、稀疏度K与重构成功概率关系的实验与结果(CS_Reconstuction_KtoPercentage.m)
% 压缩感知重构算法测试CS_Reconstuction_KtoPercentage.m
% 绘制参考文献中的Fig.
% 参考文献:Joel A. Tropp and Anna C. Gilbert
% Signal Recovery From Random Measurements Via Orthogonal Matching
% Pursuit,IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. , NO. ,
% DECEMBER .
%
clear all;close all;clc; %% 参数配置初始化
CNT = ; %对于每组(K,M,N),重复迭代次数
N = ; %信号x的长度
Psi = eye(N); %x本身是稀疏的,定义稀疏矩阵为单位阵x=Psi*theta
M_set = [,,,,]; %测量值集合
Percentage = zeros(length(M_set),N); %存储恢复成功概率 %% 主循环,遍历每组(K,M,N)
tic
for mm = :length(M_set)
M = M_set(mm); %本次测量值个数
K_set = ::ceil(M/); %信号x的稀疏度K没必要全部遍历,每隔5测试一个就可以了
PercentageM = zeros(,length(K_set)); %存储此测量值M下不同K的恢复成功概率
for kk = :length(K_set)
K = K_set(kk); %本次信号x的稀疏度K
P = ;
for cnt = :CNT %每个观测值个数均运行CNT次
Index_K = randperm(N);
x = zeros(N,);
x(Index_K(:K)) = *randn(K,); %x为K稀疏的,且位置是随机的
Phi = randn(M,N); %测量矩阵为高斯矩阵
A = Phi * Psi; %传感矩阵
y = Phi * x; %得到观测向量y
theta = CS_OMP(y,A,K); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P = P + ;
end
end
PercentageM(kk) = P/CNT*; %计算恢复概率
end
Percentage(mm,:length(K_set)) = PercentageM;
end
toc
save KtoPercentage1000test %运行一次不容易,把变量全部存储下来 %% 绘图
S = ['-ks';'-ko';'-kd';'-kv';'-k*'];
figure;
for mm = :length(M_set)
M = M_set(mm);
K_set = ::ceil(M/);
L_Kset = length(K_set);
plot(K_set,Percentage(mm,:L_Kset),S(mm,:));%绘出x的恢复信号
hold on;
end
hold off;
xlim([ ]);
legend('M=52','M=100','M=148','M=196','M=244');
xlabel('Sparsity level(K)');
ylabel('Percentage recovered');
title('Percentage of input signals recovered correctly(N=256)(Gaussian)');
六、参考文章
http://blog.csdn.net/jbb0523/article/details/45268141
更多OMP请参考:浅谈压缩感知(九):正交匹配追踪算法OMP
浅谈压缩感知(二十一):压缩感知重构算法之正交匹配追踪(OMP)的更多相关文章
- 浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容: gOMP的算法流程 gOMP的MATLAB实现 一维信号的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.gOMP的算法流程 广义正交匹配追踪(Generalized OMP, g ...
- 浅谈压缩感知(二十六):压缩感知重构算法之分段弱正交匹配追踪(SWOMP)
主要内容: SWOMP的算法流程 SWOMP的MATLAB实现 一维信号的实验与结果 门限参数a.测量数M与重构成功概率关系的实验与结果 SWOMP与StOMP性能比较 一.SWOMP的算法流程 分段 ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
- 浅谈压缩感知(二十二):压缩感知重构算法之正则化正交匹配追踪(ROMP)
主要内容: ROMP的算法流程 ROMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 一.ROMP的算法流程 正则化正交匹配追踪ROMP算法流程与OMP的最大不同之 ...
- 浅谈压缩感知(九):正交匹配追踪算法OMP
主要内容: OMP算法介绍 OMP的MATLAB实现 OMP中的数学知识 一.OMP算法介绍 来源:http://blog.csdn.net/scucj/article/details/7467955 ...
- [转]压缩感知重构算法之分段正交匹配追踪(StOMP)
分段正交匹配追踪(StagewiseOMP)或者翻译为逐步正交匹配追踪,它是OMP另一种改进算法,每次迭代可以选择多个原子.此算法的输入参数中没有信号稀疏度K,因此相比于ROMP及CoSaMP有独到的 ...
- 浅谈Kotlin(二):基本类型、基本语法、代码风格
浅谈Kotlin(一):简介及Android Studio中配置 浅谈Kotlin(二):基本类型.基本语法.代码风格 浅谈Kotlin(三):类 浅谈Kotlin(四):控制流 通过上面的文章,在A ...
- 浅谈Java代理二:Cglib动态代理-MethodInterceptor
浅谈Java代理二:Cglib动态代理-MethodInterceptor CGLib动态代理特点: 使用CGLib实现动态代理,完全不受代理类必须实现接口的限制,而且CGLib底层采用ASM字节码生 ...
- 浅谈Excel开发:十一 针对64位Excel的插件的开发和部署
自Office 2010版本开始有了32位和64位之分,对Excel来说,32位的Excel和64位的Excel在性能上的主要区别是64位的Excel能够处理2G及2G以上的大数据集. 随着64位操作 ...
随机推荐
- VIM 键盘符号
:h key-notation //查询键盘符号说明<>> 等于shift + > % 是跳到对应的括号 x 是删除当前字符,即右括号 '' 是跳回左括号 x 删除左括号
- CSS----布局注意事项
1.当div标签中含有子标签,如果div标签的大小是被div中的子标签撑起来的,那么可能布局(之后)可能就会出现问题(if 父级div中没有border,padding,inlinecontent,子 ...
- hdu1828 扫描线计算周长
和扫描线计算面积差不多,新加了lbd,rbd线段树来标记区间的左右两侧是否被填充(左右边界是否存在),numbd线段树统计区间有多少边 /*数据弱不用离散化,但是要处理一下坐标*/ #include& ...
- cf276E 两棵线段树分别维护dfs序和bfs序,好题回头再做
搞了一晚上,错了,以后回头再来看 /* 对于每次更新,先处理其儿子方向,再处理其父亲方向 处理父亲方向时无法达到根,那么直接更新 如果能达到根,那么到兄弟链中去更新,使用bfs序 最后,查询结点v的结 ...
- python3的unittest中使用test suite(测试套件)执行指定测试用例
示例代码 module.py class baidumodule(): def __init__(self,driver,): self.dr = driver #不能在类中再次导入webdriver ...
- Sony笔记本
关机的情况下按键盘 f2键.进菜单选更改 bios设置 修改 3个地方 进bios右移 boot上 第一项 ufei改成 legacy external device改成enabled 下面启动顺序改 ...
- VMvare虚拟机如何删除安装的ubuntu操作系统
VMvare虚拟机如何删除安装的ubuntu操作系统呢??? 这个问题其实在我刚开始接触虚拟机和ubuntu操作系统的时候对于如何删除操作系统是一件很苦恼的事情,因为按照书本的步骤,根本看不懂如何操作 ...
- [转] 深入理解React 组件状态(State)
React 的核心思想是组件化的思想,应用由组件搭建而成,而组件中最重要的概念是State(状态),State是一个组件的UI数据模型,是组件渲染时的数据依据. 一. 如何定义State 定义一个合适 ...
- numpy np.newaxis 的实用
>> type(np.newaxis) NoneType >> np.newaxis == None True np.newaxis 在使用和功能上等价于 None,其实就是 ...
- turbo boost - 睿频加速
turbo boost就是英特尔睿频加速技术 英特尔睿频加速技术是英特尔酷睿 i7/i5 处理器的独有特性,也是英特尔新宣布的一项技术.这项技术可以理解为自动超频.当开启睿频加速之后,CPU会根据当前 ...