机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线。
1、轨迹计划的对象
轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨迹规划。暂时不考虑三维地图,以平面二维图为例,map主要有以下几种:


如上所示,二维图可以分为有权重的节点图以及无权重的网格图。以飞行机器人移动为例:如果场地上每个部分移动所消耗的能量都是等价的,则可以使用网格图进行建模。如果在不同的区域移动所消耗的能量不同,则应该使用节点图来进行建模。
2、轨迹规划的方法
2.1、 grassfire method
grassfire method是一种最简单的轨迹规划算法。其数据结构包括三个部分:
1.map,记录了起点,终点,障碍物的位置
2.distancetoStart,记录了每个探索步骤后,方格与初始点的距离
3.parent,记录了每个节点的父节点
算法步骤:
1、获取map
2、初始化distancetostart,将起点设为current, 将distance_ 设为0
3、进入循环 如果current = destination 则跳出循环
将distancetostart中最小值对应的节点设为current
distance_ = distance_+1
寻找current所有的相邻节点
将相邻节点的distancetostart设为distance_,parent设为current
将current的distance_设为无穷大
4、依据parent map反求轨迹


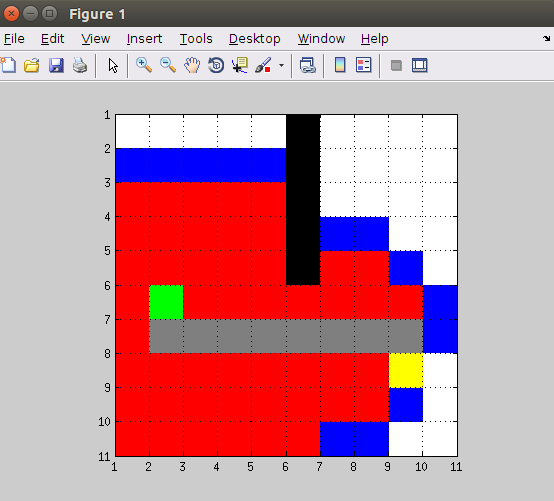
显然,这种grassfire算法是极其消耗计算能力的,因为其需要遍历网格中几乎每一个格子,甚至明明destination在上方,grassfire算法依旧需要向下探索。图中红色的区域代表已探索的点,蓝色是candidate,绿色是起点,黄色是终点。显然这个算法是各向同性的。
2.2、A* 算法
grassfire算法的最大缺点是没有使用终点与起点相对位置关系信息。从而导致各项同性的探索策略。如果能增加一个将candidate拉向目标点的趋势,则可以减小被探索的点数目。
A* 算法的数据结构包括五个部分:
1、map
2、g:相当于distancetostart;
3、H:一种衡量算子,用于衡量当前点到目标点的绝对距离
4、f:g+H,综合了当前点到起点的距离与到终点的距离
5、parent,用于记录轨迹
算法步骤:
1、初始化,获取map,并将起点设为current. 获取H map,distance_ = 0
2、进入循环 如果current为destination则退出循环
distance_ = distance_ +1;
获取当前点的相邻点
将相邻点的g map值设为distance_
将相邻点的f map值设为g+H
选择f map值最小的点为current
将current f map值设为无穷大
3、根据parent map, 反求轨迹
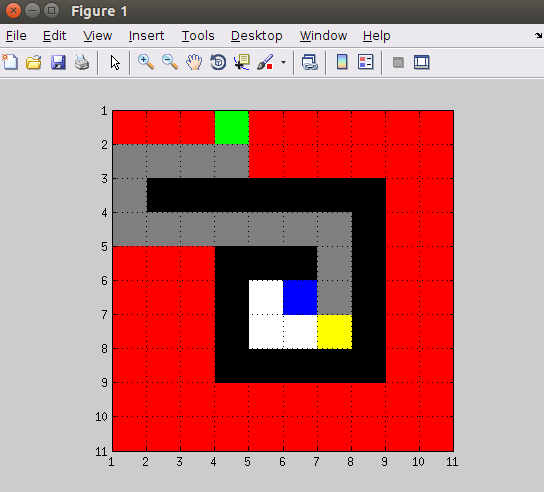
结果如上所示。
显然,由于引入了H map,所以算法会优先探索相对终点较近的点。obj = distance to start + distance to end 代表了最后需要走过的距离。每次都选择最小的obj,并且最后能够达到终点,那么总路程一定是全局最小的。
3、总结
对于飞行机器人而言,每次移动都会消耗大量的能量。好的轨迹规划算法可以保证飞行器少走弯路,避开障碍。所以减少计算量必须是在少走弯路的前提下。移动所消耗的能量是计算所消耗能量的十倍左右。
机器人学 —— 轨迹规划(Introduction)的更多相关文章
- 机器人学 —— 轨迹规划(Artificial Potential)
今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor. 最后一节课的内容是利用势场来进行轨迹规划.此方法的思路非常清晰,针对Configration ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 机器人中的轨迹规划(Trajectory Planning )
Figure. Several possible path shapes for a single joint 五次多项式曲线(quintic polynomial) $$\theta(t)=a_0+ ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值.为了解决这些问题有两种思路: 思路 ...
- Minimum Snap轨迹规划详解(1)轨迹规划
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划.运动规划一般又分为两步: 1.路径规划:在地图(栅格地图.四\八叉树.RRT地图等)中搜索一条从A点到B ...
随机推荐
- 7、XAML的编译过程
对于动态皮肤场景来说,在运行时加载和解析XAML是有意义的,对于那些没有支持XAML编译的.NET语言也是有意义的.但大多数WPF项目会通过MSBuild和Visual Studio完成XAML编译. ...
- stringlist
#ifndef _STRINGLIST_HPP_#define _STRINGLIST_HPP_ #include "../global.hpp"#include <type ...
- vxworks启动
- c语言编程之队列(链表实现)
用链表实现了队列,完成了队列的入队和出队功能. #include"stdio.h" typedef int element; typedef struct Node{ struct ...
- WEB前端常用的测试工具
一.QUnit 前端测试工具 QUnit是一个强大的JavaScript单元测试框架,该框架是由jQuery团队的成员所开发,并且是jQuery的官方测试套件.Qunit是Jquery的单元测试框架, ...
- java中判空
一.概述 java中判等似乎很简单,==用来判断对象引用(内存地址)是否相同,equals用来判断值是否相同.你可以试用String对象轻松区分这一点. 那么在null判等(也就是判空操作)时呢? 可 ...
- 浅析白盒审计中的字符编码及SQL注入
尽管现在呼吁所有的程序都使用unicode编码,所有的网站都使用utf-8编码,来一个统一的国际规范.但仍然有很多,包括国内及国外(特别是非英语国家)的一些cms,仍然使用着自己国家的一套编码,比如g ...
- make -f dc_debug.mak 提示错误"/usr/bin/ld:can not find -l***"解决办法
在公司不同服务器上"make -f ***"程序的时候,有的服务器可以编译通过,有的却提示"/usr/bin/ld:can not find -l***"的错误 ...
- uva 10106
尝试一下java 的大数类 import java.util.*; import java.io.*; import java.math.BigInteger; public class Main { ...
- MariaDB Galera Cluster 部署(如何快速部署MariaDB集群)
MariaDB Galera Cluster 部署(如何快速部署MariaDB集群) [日期:--] 来源:Linux社区 作者:Linux [字体:大 中 小] MariaDB作为Mysql的一个分 ...