【转】 ISP-黑电平校正(BLC)
转自:https://blog.csdn.net/xiaoyouck/article/details/72824534
介绍
黑电平(Black Level Correction)也就是黑色的最低点,以8bit数据来说,指在经过一定校准的显示装置上,没有一行光亮输出的视频信号电平。定义图像数据为0时对应的信号电平。
原因
那么为什么要进行黑电平校正呢?原因如下:
CMOS传感器采集的信息经过一系列转换生成原始RAW格式数据。以8bit数据为例,单个pixel的有效值是0~255,但是实际AD芯片(模数转换芯片)的精度可能无法将电压值很小的一部分转换出来,因此,sensor厂家一般会在AD的输入之前加上一个固定的偏移量,使输出的pixel value在5(非固定)~255之间,目的是为了让暗部的细节完全保留,当然同时也会损失一些亮部细节,由于对于图像来说,我们的关注度更倾向于暗部区域,ISP后面会有很多增益模块(LSC、AWB、Gamma等),因此亮区的一点点损失是可以接受的。
sensor的电路本身会存在暗电流,导致在没有光线照射的时候,像素单位也有一定的输出电压,暗电流这个东西跟曝光时间和gain都有关系,不同的位置也是不一样的。因此在gain增大的时候,电路的增益增大,暗电流也会增强,因此很多ISP会选择在不同gain下减去不同的bl的值。
Optical Black
每个sensor都有OB区域,CCD sensor初期成像效果较差,它会把top OB 和 side OB暴露给isp使用,这样isp可以自己估算不同区域不同的black level值,再分别处理。然而ob并不能真实的反映黑电平的值,因此目前很少有ISP或sensor去使用ob区域进行计算。
校正
现在的主流cmos sensor都是自己把black level已经处理完了。在isp部分减掉的其实不是black level,而是sensor统一做出来的pedestal。sensor端不会将bl减完,因为sensor输出不能为负数,若将bl减完,就等于小于0的部分直接就丢掉了,这样做会改变noise的分布。
算法
一般BLC模块会放在ISP比较靠前的位置,因为我们希望图像在进入其他模块之前能够还原最为真实的图像。有些sensor会在sensor内部集成BLC的模块,那么此时ISP里的BLC模块只做微调即可。
由于硬件设计人员在设计BLC模块时需要考虑效果和成本,因此目前市场上使用的ISP一般采用的方法是在sensor输出的图像上减去一个数值。
BLC各个通道均需要校正,目前比较常用的方法有:
中值
全局均值
局部均值
自定义
计算较为简单,这里不附代码了。
tuning
由于电源、PCB等各个原因,我们遇到的黑平衡并不是那么理想,如下两种情况,当然还有更糟的,这里不一一列举。
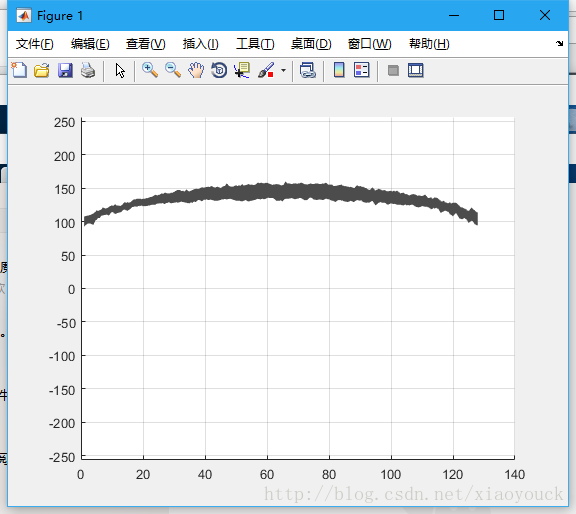
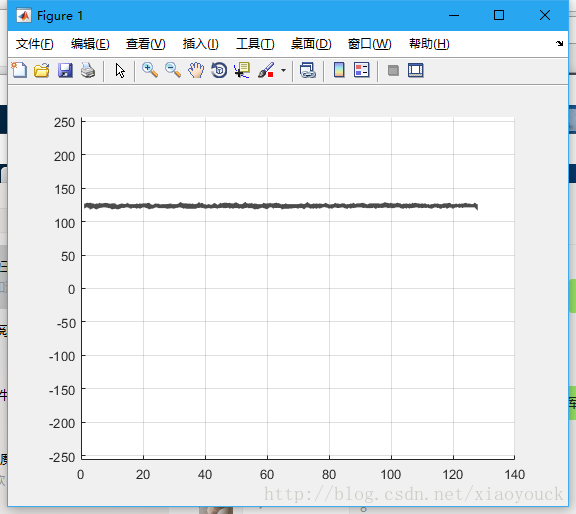
校正前需要根据图像的具体情况进行分析,若图像平面趋于平整,则推荐使用全帧均值;若图像出现一些峰值,有明显突出山峰等,推荐使用中值的方法;若出现某个角的值比较高,可能由于电源或者其他的原因引起的,则推荐使用局部计算的方法;此外,还有自定义、最大值等方法,需要根据不同图像的情况去选择方法,终其目的都是一样的。
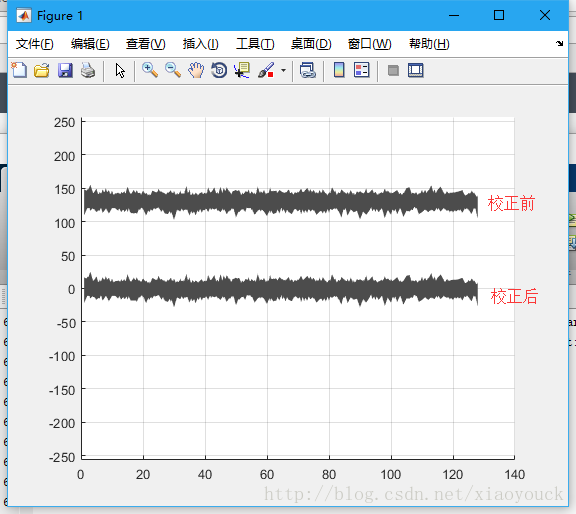
以单通道为例,以下是黑电平校正的示意图:
【转】 ISP-黑电平校正(BLC)的更多相关文章
- 黑电平校正BLC
参考:https://www.cnblogs.com/zhangAlin/p/10661763.html
- ISP基本框架及算法介绍
什么是ISP,他的工作原理是怎样的? ISP是Image Signal Processor的缩写,全称是影像处理器.在相机成像的整个环节中,它负责接收感光元件(Sensor)的原始信号数据,可以理解为 ...
- ISP-OB, pedestal 以及ISP概述
网上的直接参考资料 1. https://zhuanlan.zhihu.com/p/36896537 2. https://blog.csdn.net/m0_38049850/article/deta ...
- 摄像头 ISP 调试的入门之谈(经验总结)
在讲述本文之前,我尽量以一个什么也不清楚的初学到入门的用词来阐述什么是 ISP 调试,以及为什么需要调试. 如果你从来都没有接触过什么是摄像头 ISP 调试,我想这个文章可以给你一些启发和关键词. 因 ...
- 摄像头ISP系统原理(下)
摄像头ISP系统原理(下) l WDR(Wide Dynamic Range)------宽动态 动态范围(Dynamic Range)是指摄像机支持的最大输出信号和最小输出信号的比值,或者说图像最 ...
- ISP算法高水平分析(下)
ISP算法高水平分析(下) 十.LSC(Lens Shade Correction)------镜头阴影矫正 Lens Shading指画面四角由于入射光线不足形成的暗角,同时,由于不同频率的光折射 ...
- ISP图像质量调节介绍
ISP(Image Signal Processor),即图像处理,主要作用是对前端图像传感器输出的信号做后期处理,主要功能有线性纠正.噪声去除.坏点去除.内插.白平衡.自己主动曝光控制等.依赖于IS ...
- 【转】camera tuning
chromatix项目必须包含有效的 ADC image.png filcker: 交流电照明灯发出的光会一定频率的抖动导致sensor图像出现行方向的水波纹,称之为filcker.目前主要的交流电频 ...
- [转]camera的构成
camera的构成 拍摄景物通过镜头,将生成的光学图像投射到传感器上,然后光学图像被转换成电信号,电信号再经过模数转换变为数字信号,数字信号经过DSP加工处理,再被送到电脑中进行处理,最终转换成手机屏 ...
随机推荐
- css3之动画属性transform、transition、animation
工作当中,会遇到很多有趣的小动画,使用css3代替js会节省工作量,css3一些属性浏览器会出现不兼容,加浏览器的内核前缀 -moz-. -webkit-. -o- 1.transform rotat ...
- select()函数 的学习
select()的介绍 全是拷贝的如下文章: https://www.cnblogs.com/wenqiang/p/5508541.html select()函数的用例代码摘录如下文章: https: ...
- 【托业】【新东方托业全真模拟】TEST05~06-----P5~6
credit A with B 把A归功于B present A with B 给A赠送B proofread thoroughly 彻底地校对:exclusively 专门地:独占地:apparen ...
- Ubuntu虚拟机识别不了SD卡的解决办法
前提,你的虚拟机已经安装了VMware Tools. Step 1: 出现这种情况先查看计算机中的虚拟机的VMware USB Arbitration Service是否启用(注意是VMware US ...
- jenkins和svn搭建自动代码构建发布
jenkins安装和配置 .安装jenkins .yum install java wget -O /etc/yum.repos.d/jenkins.repo https://pkg.jenkins. ...
- #学号 20175201张驰 《Java程序设计》第1周学习总结
教材学习内容总结 第一章 ·第一章的内容相对简单,我并未遇到大的困难. ·1.Java特点:语法简单.面向对象.与平台无关.动态. ·2.关于编写源文件:源文件名字必须与public类的名字相同:保存 ...
- C# Remoting例子
4-23 https://www.cnblogs.com/zhengyun_ustc/archive/2006/06/09/remoting_InvalidCredentialException.ht ...
- 杨韬的Markdown自定义CSS样式
效果 样例 杨韬的Python/Jupyter学习笔记 Markdown例子链接页面 代码 /*主标题*/ #cb_post_title_url{ font-size: 31px; } /*h1,h2 ...
- GCD(IV)
死锁:2个任务相互等待造成的. - (void) GCD { NSLog(@"begin"); dispatch_queue_t queue = dispatch_queue_cr ...
- JavaScript 作用域链其实很简单
概念 作用域链的用途,是保证对执行环境有权访问的所有变量和函数的有序访问.其本质就是一个指向变量对象的指针列表.在js中,当某个函数被调用时,会创建一个执行环境(execution context)及 ...