十一 模板匹配match template
一、介绍
1、模板匹配
通俗讲就是以图找图,通过图中的一部分来找它在图中的位置(模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域)。
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。
它是图像处理中最基本、最常用的匹配方法。
2、作用有局限性
必须在指定的环境下,才能匹配成功,是受到很多因素的影响,所以有一定的适应性
模板匹配具有自身的局限性,主要表现在它只能进行平行移动,若原图像中的匹配目标发生旋转或大小变化,该算法无效。
3、工作原理
在待检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
常见的几种模板匹配算法

①TM_SQDIFF是平方差匹配;TM_SQDIFF_NORMED是标准平方差匹配。利用平方差来进行匹配,最好匹配为0.匹配越差,匹配值越大。所以这个函数和其他函数是不一样的
②TM_CCORR是相关性匹配;TM_CCORR_NORMED是标准相关性匹配。采用模板和图像间的乘法操作,数越大,越接近1表示匹配程度较高, 0表示最坏的匹配效果。
③TM_CCOEFF是相关性系数匹配;TM_CCOEFF_NORMED是标准相关性系数匹配。将模版对其均值的相对值与图像对其均值的相关值进行匹配,1表示完美匹配,-1表示糟糕的匹配,0表示没有任何相关性(随机序列)。
总结:随着从简单的测量(平方差)到更复杂的测量(相关系数),我们可获得越来越准确的匹配(同时也意味着越来越大的计算代价)。
在这里我们是通过这三种方式来匹配:cv.TM_SQDIFF_NORMED, cv.TM_CCORR_NORMED, cv.TM_CCOEFF_NORMED
4、涉及函数
(1)目标匹配函数result = cv.matchTemplate(target,tpl,md)
函数原型为:matchTemplate(image, templ, method[, result[, mask]]) -> result
image 参数表示待搜索源图像,必须是8位整数或32位浮点。
templ 参数表示模板图像,必须不大于源图像并具有相同的数据类型。
method 参数表示计算匹配程度的方法。
result 参数表示匹配结果图像,必须是单通道32位浮点。如果image的尺寸为W x H,templ的尺寸为w x h,则result的尺寸为(W-w+1)x(H-h+1)。
(2)min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result)
opencv的函数minMaxLoc:在给定的矩阵中寻找最大和最小值,并给出它们的位置。 该功能不适用于多通道阵列。 如果您需要在所有通道中查找最小或最大元素,要先将阵列重新解释为单通道。
函数minMaxLoc原型为:minMaxLoc(src[, mask]) -> minVal, maxVal, minLoc, maxLoc
src参数表示输入单通道图像。
mask参数表示用于选择子数组的可选掩码。
minVal参数表示返回的最小值,如果不需要,则使用NULL。
maxVal参数表示返回的最大值,如果不需要,则使用NULL。
minLoc参数表示返回的最小位置的指针(在2D情况下); 如果不需要,则使用NULL。
maxLoc参数表示返回的最大位置的指针(在2D情况下); 如果不需要,则使用NULL。
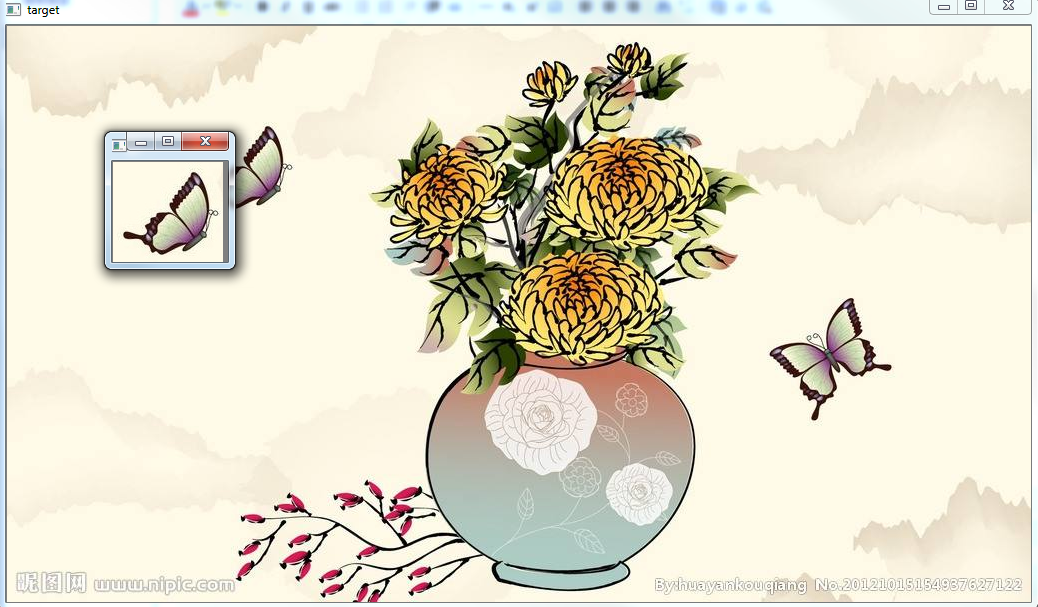
tpl = cv.imread('11.jpg')
target = cv.imread('1.jpg')
cv.imshow('template_butterfly',tpl)
cv.imshow('target',target)
methods = [cv.TM_SQDIFF_NORMED,cv.TM_CCORR_NORMED,cv.TM_CCOEFF_NORMED]
tpl_h,tpl_w = tpl.shape[:2]
for md in methods:
result = cv.matchTemplate(target,tpl,md) #result是模板图像去匹配源图像,在源图像的区域位置图像
min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result)
print("--------------%s--------------" % md)
print("min_val", min_val)
print("max_val", max_val)
print("min_loc", min_loc)
print("max_loc", max_loc)
print("--------------%s--------------\n" % md)
--------------1--------------
min_val 6.713293259963393e-05 #标准差越小,匹配效果越好
max_val 0.6963181495666504
min_loc (180, 90)
max_loc (478, 235)
--------------1--------------
--------------3--------------
min_val 0.7413668632507324
max_val 0.9770615100860596 #相关性越接近一,匹配效果越好
min_loc (496, 85)
max_loc (180, 90)
--------------3--------------
--------------5--------------
min_val -0.43208545446395874
max_val 0.8136414289474487 #相关性越接近一,匹配效果越好
min_loc (871, 75)
max_loc (180, 90)
--------------5--------------
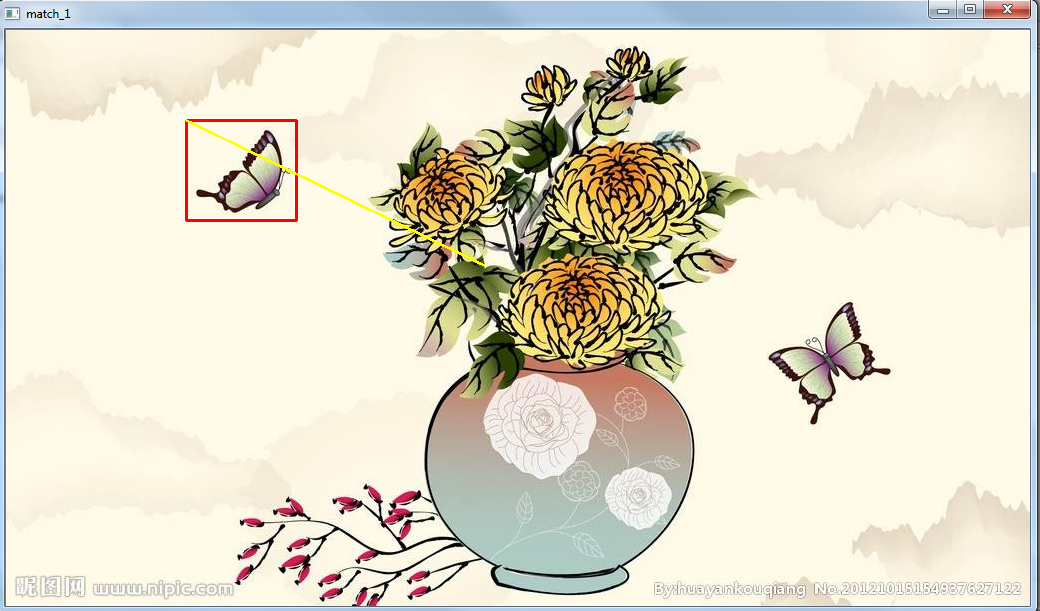
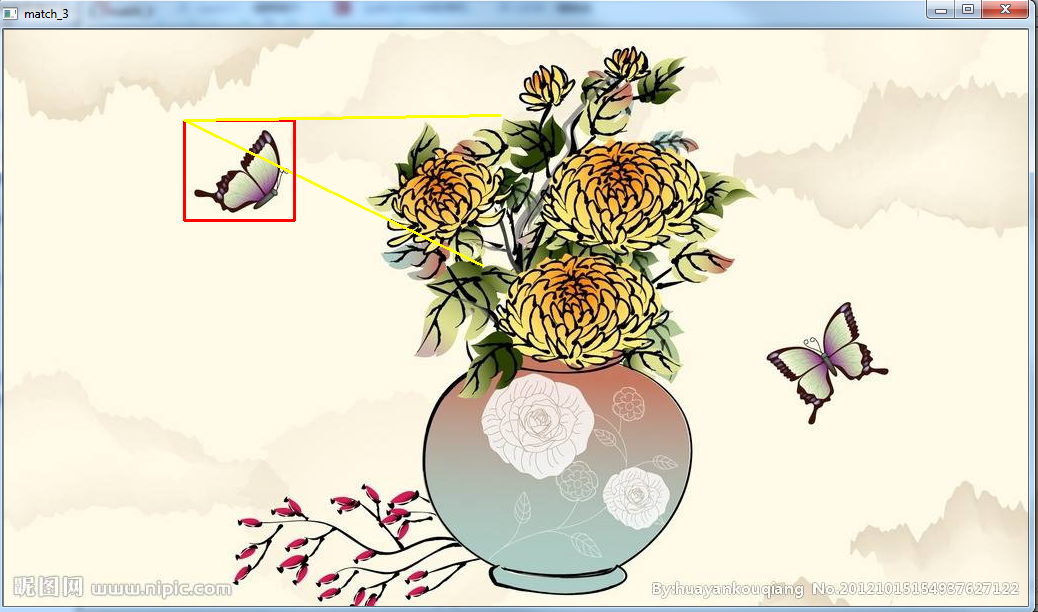
查看min_loc和max_loc关系
cv.line(target,min_loc,max_loc,(0,255,255),2)

二、代码实现
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
from PIL import Image def template_demo():
tpl = cv.imread('11.jpg')
target = cv.imread('1.jpg')
cv.imshow('template_butterfly',tpl)
cv.imshow('target',target)
methods = [cv.TM_SQDIFF_NORMED,cv.TM_CCORR_NORMED,cv.TM_CCOEFF_NORMED]
tpl_h,tpl_w = tpl.shape[:2]
for md in methods:
result = cv.matchTemplate(target,tpl,md) #result是模板图像去匹配源图像,再源图像的区域位置图像
min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result) #获取的是每种公式中计算出来的值,每个像素点都对应一个值 if md == cv.TM_SQDIFF_NORMED:
t1 = min_loc #最小位置指针
else:
t1 = max_loc #最大位置指针
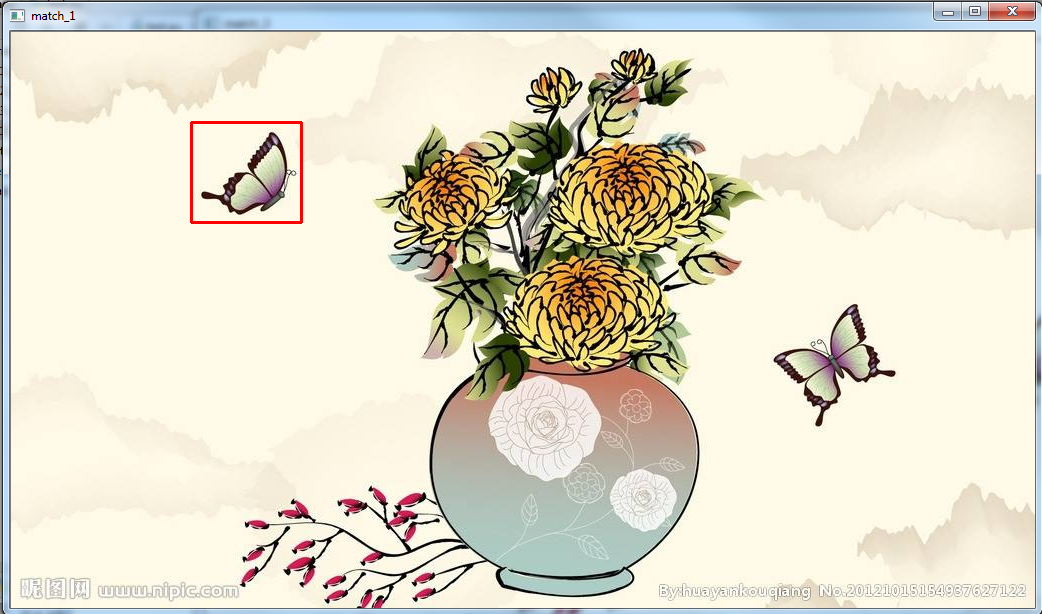
br = (t1[0]+tpl_w,t1[1] + tpl_h)
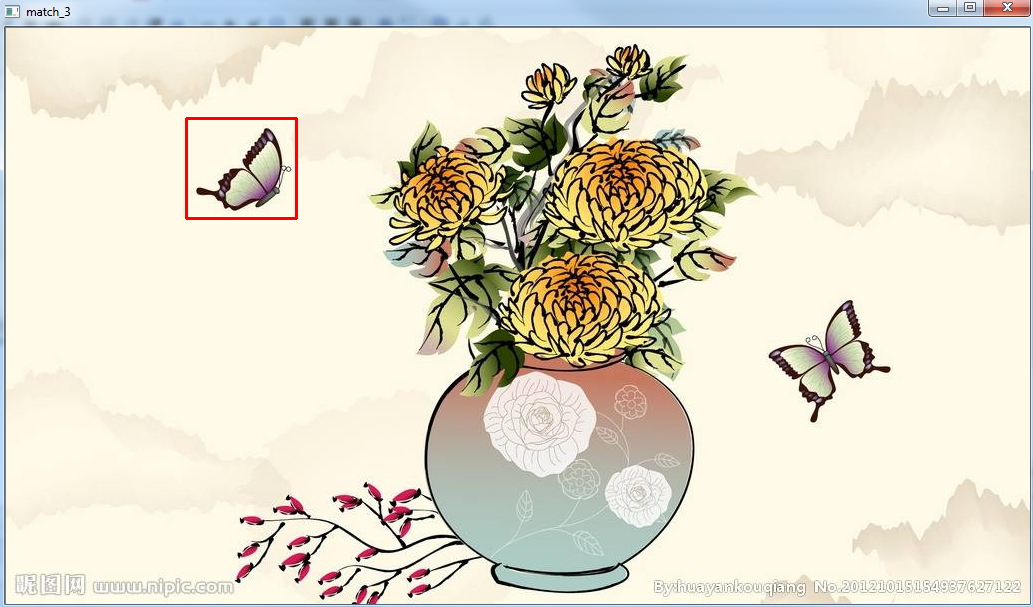
cv.rectangle(target,t1,br,(0,0,255),2) #画个矩形
#cv.line(target,min_loc,max_loc,(0,255,255),2) #画条线,连接最小位置和最大位置(就是匹配的图片左上角和右下角)
cv.imshow('match_%s'%md,target) template_demo()
cv.waitKey(0)
cv.destroyAllWindows()

十一 模板匹配match template的更多相关文章
- 使用Python+OpenCV进行图像模板匹配(Match Template)
2017年9月22日 BY 蓝鲸 LEAVE A COMMENT 本篇文章介绍使用Python和OpenCV对图像进行模板匹配和识别.模板匹配是在图像中寻找和识别模板的一种简单的方法.以下是具体的步骤 ...
- opencv::模板匹配(Template Match)
模板匹配介绍 模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域. 所以模板匹配首先需要一个模板图像T(给定的子图像) 另外需要一个待检测的图像-源图像S 工作方法,在带检测图像上,从左到右,从 ...
- OpenCV-Python 模板匹配 | 三十一
目标 在本章中,您将学习 使用模板匹配在图像中查找对象 你将看到以下功能:cv.matchTemplate(),cv.minMaxLoc() 理论 模板匹配是一种用于在较大图像中搜索和查找模板图像位置 ...
- Opencv Match Template(轮廓匹配)
#include <iostream>#include <opencv2/opencv.hpp> using namespace std;using namespace cv; ...
- OpenCV 学习笔记(模板匹配)
OpenCV 学习笔记(模板匹配) 模板匹配是在一幅图像中寻找一个特定目标的方法之一.这种方法的原理非常简单,遍历图像中的每一个可能的位置,比较各处与模板是否"相似",当相似度足够 ...
- Atitit opencv模板匹配attilax总结
Atitit opencv模板匹配attilax总结 找一幅图像的匹配的模板,可以在一段视频里寻找出我们感兴趣的东西,比如条形码的识别就可能需要这样类似的一个工作提取出条形码区域(当然这样的方法并不鲁 ...
- 【计算机视觉】OpenCV篇(10) - 模式识别中的模板匹配
什么是模式识别? 它指的是,对表征事物或现象的各种形式的信息进行处理和分析,从而达到对事物或现象进行描述.辨认.分类和解释的目的. 我们之所以可以很快辨别猫是猫.O不是0,就是因为在我们大脑中已经给猫 ...
- C++ Templates (1.2 模板实参推断 Template Argument Deduction)
返回完整目录 目录 1.2 模板实参推断 Template Argument Deduction 1.2 模板实参推断 Template Argument Deduction 当调用函数模板(如max ...
- 使用OpenCV&&C++进行模板匹配.
一:课程介绍 1.1:学习目标 学会用imread载入图像,和imshow输出图像. 用nameWindow创建窗口,用createTrackbar加入滚动条和其回调函数的写法. 熟悉OpenCV函数 ...
随机推荐
- nyoj--236--心急的C小加(动态规划&&LIS)
心急的C小加 时间限制:1000 ms | 内存限制:65535 KB 难度:4 描述 C小加有一些木棒,它们的长度和质量都已经知道,需要一个机器处理这些木棒,机器开启的时候需要耗费一个单位的时间 ...
- javascript系列-class3.循环语句
欢迎加入前端交流群来py: 转载请标明出处! while循环 while(循环终止条件){ } 案例 输出0~100个数字 1 . 3 . 5 不输出 输出一百数字 ...
- chrome的全局搜索快捷键
常用 文件内搜索 ctrl+f 使用快捷键 ctrl+shift+f, 就会进入到全局搜索模式 打开文件:ctrl+o 打开DevTools 你可以通过以下任何一种方式来访问DevTools: 打开浏 ...
- 唯品会API网关设计与实践--转
原文地址:https://609518.kuaizhan.com/86/70/p4108366952248f 刘璟宇Leo 唯品会资深研发工程师,在大型高性能分布式系统设计和开发方面有丰富的经验.目前 ...
- 10:Challenge 3(树状数组直接修改)
总时间限制: 10000ms 单个测试点时间限制: 1000ms 内存限制: 262144kB 描述 给一个长为N的数列,有M次操作,每次操作是以下两种之一: (1)修改数列中的一个数 (2)求 ...
- 3ds Max实例教程-顽皮的小孩
本教程介绍使用3ds Max制作设计一个顽皮的小孩,这个作品的灵感来源于作者的亲身经历,也是以真实人物为原型做出来这么一个小人. 作者: Claudius Vesting 使用软件:3ds Max,P ...
- BZOJ 3261 最大异或和 (可持久化01Trie)
题目大意:让你维护一个序列,支持在序列末插入一个数,支持询问$[l,r]$区间内选择一个位置$p$,使$xor\sum_{i=p}^{n}a_{i}$最大 可持久化$01Trie$裸题,把 区间异或和 ...
- oracle 11G 配置侦听文件
lsnrctl status 130 2017-08-23 03:15:16 oracle cat /etc/hosts 131 2017-08-23 03:15:26 oracle ca ...
- 部署OGG时字符集转换问题--oracle to oracle已验证,其他异构环境应当也适用
之前在安装OGG总是遇到字符集问题,尤其是多源端对一个目标端时,源端字符集不同,导致出现字符集问题 无法同步数据,查阅了大量的园子资料,都说要设置复制或抽取进程中SETENV (NLS_LANG=AM ...
- Qt之QTimer
简述 QTimer类提供了重复和单次触发信号的定时器. QTimer类为定时器提供了一个高级别的编程接口.很容易使用:首先,创建一个QTimer,连接timeout()信号到适当的槽函数,并调用sta ...