CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)
CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)
1. 目标检测:FCOS(CVPR 2019)
目标检测算法FCOS(FCOS: Fully Convolutional One-Stage Object Detection),该算法是一种基于FCN的逐像素目标检测算法,实现了无锚点(anchor-free)、无提议(proposal free)的解决方案,并且提出了中心度(Center—ness)的思想,同时在召回率等方面表现接近甚至超过目前很多先进主流的基于Anchor box目标检测算法。
基于像素级预测一阶全卷积目标检测(FCOS)来解决目标检测问题,类似于语音分割。目前大多数先进的目标检测模型,例如RetinaNet、SSD、YOLOv3、Faster R-CNN都依赖于预先定义的Anchor box。相比之下,本文提出的FCOS是anchor box free,而且也是proposal free,就是不依赖预先定义的Anchor box或者提议区域。通过去除预先定义的Anchor box,FCOS完全的避免了关于Anchor box的复杂运算,例如训练过程中计算重叠度,而且节省了训练过程中的内存占用。更重要的是,本文避免了和Anchor box有关且对最终检测结果非常敏感的所有超参数。由于后处理只采用非极大值抑制(NMS),所以本文提出的FCOS比以往基于Anchor box的一阶检测器具有更加简单的优点。
Anchor box缺点
l 检测表现效果对于Anchor box的尺寸、长宽比、数目非常敏感,因此Anchor box相关的超参数需要仔细的调节。
l Anchor box的尺寸和长宽比是固定的,因此,检测器在处理形变较大的候选对象时比较困难,尤其是对于小目标。预先定义的Anchor box还限制了检测器的泛化能力,因为,它们需要针对不同对象大小或长宽比进行设计。
l 为了提高召回率,需要在图像上放置密集的Anchor box。而这些Anchor box大多数属于负样本,这样造成了正负样本之间的不均衡。
l 大量的Anchor box增加了在计算交并比时计算量和内存占用。
FCOS详细介绍
FCOS优势
l FCOS与许多基于FCN的思想是统一的,因此可以更轻松的重复使用这些任务的思路。
l 检测器实现了proposal free和anchor free,显著的减少了设计参数的数目。设计参数通常需要启发式调整,并且设计许多技巧。另外,通过消除Anchor box,新探测器完全避免了复杂的IOU计算以及训练期间Anchor box和真实边框之间的匹配,并将总训练内存占用空间减少了2倍左右。
l FCOS可以作为二阶检测器的区域建议网络(RPN),其性能明显优于基于锚点的RPN算法。
l FCOS可以经过最小的修改便可扩展到其他的视觉任务,包括实例分割、关键点检测。
算法详细介绍
<img src="https://pic2.zhimg.com/v2-feacdb042e4a9575dc63f1541db0e7ca_b.jpg" data-caption="" data-size="normal" data-rawwidth="557" data-rawheight="278" class="origin_image zh-lightbox-thumb" width="557" data-original="https://pic2.zhimg.com/v2-feacdb042e4a9575dc63f1541db0e7ca_r.jpg">
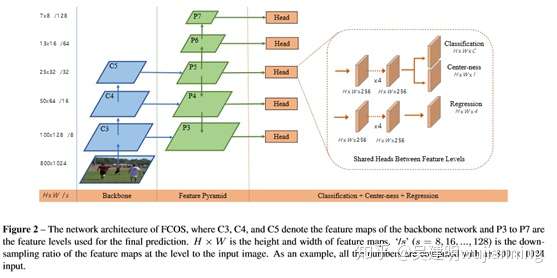
1.1全卷积一阶检测器
FCOS首先使用Backone CNN(用于提取特征的主干架构CNN),另s为feature map之前的总步伐。
与anchor-based检测器的区别
第一点
· anchor-based算法将输入图像上的位置作为Anchor box的中心店,并且对这些Anchor box进行回归。
· FCOS直接对feature map中每个位置对应原图的边框都进行回归,换句话说FCOS直接把每个位置都作为训练样本,这一点和FCN用于语义分割相同。
FCOS算法feature map中位置与原图对应的关系,如果feature map中位置为 ,映射到输入图像的位置是
。
第二点
· 在训练过程中,anchor-based算法对样本的标记方法是,如果anchor对应的边框与真实边框(ground truth)交并比大于一定阈值,就设为正样本,并且把交并比最大的类别作为这个位置的类别。
· 在FCOS中,如果位置
<img src="https://pic2.zhimg.com/v2-45f3513f1d2eecbe48e32e8ecac72670_b.jpg" data-caption="" data-size="normal" data-rawwidth="35" data-rawheight="18" class="content_image" width="35">

落入任何真实边框,就认为它是一个正样本,它的类别标记为这个真实边框的类别。
这样会带来一个问题,如果标注的真实边框重叠,位置
<img src="https://pic2.zhimg.com/v2-45f3513f1d2eecbe48e32e8ecac72670_b.jpg" data-caption="" data-size="normal" data-rawwidth="35" data-rawheight="18" class="content_image" width="35">
映射到原图中落到多个真实边框,这个位置被认为是模糊样本,后面会讲到用多级预测的方式解决的方式解决模糊样本的问题。
第三点
· 以往算法都是训练一个多元分类器
· FCOS训练C个二元分类器(C是类别的数目)
与anchor-based检测器相似之处
与anchor-based算法的相似之处是FCOS算法训练的目标同样包括两个部分:位置和类别。
FCOS算法的损失函数为:
<img src="https://pic3.zhimg.com/v2-3bc9472f8d5ef836955b2ab6a969cbc7_b.jpg" data-caption="" data-size="normal" data-rawwidth="326" data-rawheight="91" class="content_image" width="326">
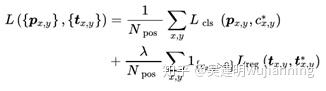
其中
<img src="https://pic1.zhimg.com/v2-d3ab2e07cc8536ffb32cb5c0e03976b4_b.jpg" data-caption="" data-size="normal" data-rawwidth="28" data-rawheight="20" class="content_image" width="28">

是类别损失,
<img src="https://pic2.zhimg.com/v2-13f6d4faa9bc2a8ea50e7699d8f590fd_b.jpg" data-caption="" data-size="normal" data-rawwidth="22" data-rawheight="16" class="content_image" width="22">

是交并比的损失。
1. 2. 用FPN对FCOS进行多级预测
首先明确两个问题:
l 基于Anchor box的检测器由于大的步伐导致低召回率,需要通过降低正的Anchor box所需的交并比分数来进行补偿:在FCOS算法中表明,及时是大的步伐(stride),也可以获取较好的召回率,甚至效果可以优于基于Anchor box的检测器。
l 真实边框中的重叠可能会在训练过程中造成难以处理的歧义,这种模糊性导致基于fcn的检测器性能下降:在FCOSzhong ,采用多级预测方法可以有效地解决模糊问题,与基于Anchor box的模糊检测器相比,基于模糊控制器的模糊检测器具有更好的性能。
前面提到,为了解决真实边框重叠带来的模糊性和低召回率,FCOS采用类似FPN中的多级检测,就是在不同级别的特征层检测不同尺寸的目标。
与基于Anchor box不同的地方
· 基于Anchor box的检测器将不同尺寸的Anchor box分配到不同级别的特征层
· FCOS通过直接限定不同特征级别的边界框的回归范围来进行分配
此外,FCOS在不同的特征层之间共享信息,不仅使检测器的参数效率更高,而且提高了检测性能。
3.Center-ness
<img src="https://pic4.zhimg.com/v2-3b2aa3c6712893a906a76bd0e6249f9c_b.jpg" data-caption="" data-size="normal" data-rawwidth="245" data-rawheight="256" class="content_image" width="245">

通过多级预测之后发现FCOS和基于Anchor box的检测器之间仍然存在着一定的距离,主要原因是距离目标中心较远的位置产生很多低质量的预测边框。
在FCOS中提出了一种简单而有效的策略来抑制这些低质量的预测边界框,而且不引入任何超参数。具体来说,FCOS添加单层分支,与分类分支并行,以预测"Center-ness"位置。
center-ness(可以理解为一种具有度量作用的概念,在这里称之为"中心度"),中心度取值为0,1之间,使用交叉熵损失进行训练。并把损失加入前面提到的损失函数中。测试时,将预测的中心度与相应的分类分数相乘,计算最终得分(用于对检测到的边界框进行排序)。因此,中心度可以降低远离对象中心的边界框的权重。因此,这些低质量边界框很可能被最终的非最大抑制(NMS)过程滤除,从而显着提高了检测性能。
实验结果
1)召回率
<img src="https://pic2.zhimg.com/v2-97ff92965a6c78b27df2d12237ebf558_b.jpg" data-caption="" data-size="normal" data-rawwidth="240" data-rawheight="140" class="content_image" width="240">
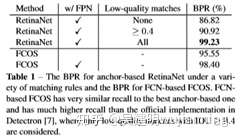
在召回率方便表现接近目前最先进的基于Anchor box的检测器。
2)有无Center-ness的结果对比
<img src="https://pic2.zhimg.com/v2-5f371cbd1d70ad24ddbcafbf98e00732_b.jpg" data-caption="" data-size="normal" data-rawwidth="243" data-rawheight="133" class="content_image" width="243">
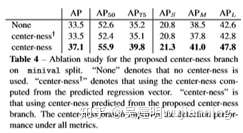
“None”表示没有使用中心。“中心度”表示使用预测回归向量计算得到的中心度。“中心度”是指利用提出的中心度分支预测的中心度。中心度分支提高了所有指标下的检测性能。
3)与先进的一阶、二阶检测器效果对比
<img src="https://pic2.zhimg.com/v2-0e269a1b34421db021c78491b6caba90_b.jpg" data-caption="" data-size="normal" data-rawwidth="497" data-rawheight="234" class="origin_image zh-lightbox-thumb" width="497" data-original="https://pic2.zhimg.com/v2-0e269a1b34421db021c78491b6caba90_r.jpg">
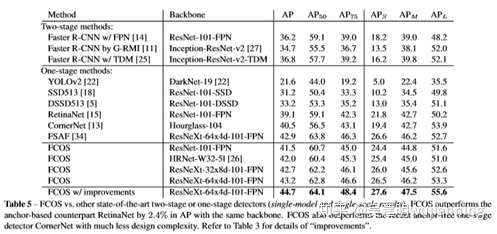
与目前最主流的一些一阶、二阶检测器对比,在检测效率方面FCOS优于Faster R-CNN、YOLO、SSD这些经典算法。
<img src="https://pic2.zhimg.com/v2-c6ac09cbf5ebe3a2e8188da73ad185d8_b.jpg" data-caption="" data-size="normal" data-rawwidth="510" data-rawheight="444" class="origin_image zh-lightbox-thumb" width="510" data-original="https://pic2.zhimg.com/v2-c6ac09cbf5ebe3a2e8188da73ad185d8_r.jpg">
2. Mask R-CNN(CVPR 2019)
首先回顾一下之前最经典的实例分割方法,‘先检测再分割’,在这方面做到极致的算法是Mask RCNN。
<img src="https://pic4.zhimg.com/v2-b426f5a4a1fd80fa44c33cf413c4b0a2_b.jpg" data-caption="" data-size="normal" data-rawwidth="336" data-rawheight="176" class="content_image" width="336">
Mask R-CNN属于基于两阶段的检测算法,在检测框的基础上进行像素级的语义分割,简化了实例分割的难度,同时取得了stoa的性能,在'先检测再分割’ 这一范式上做到了极致。
2.1. 简介
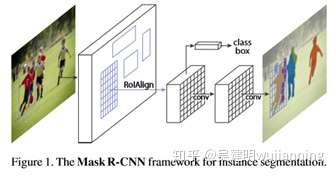
Mask R-CNN是He Kaiming大神2017年的力作,其在进行目标检测的同时进行实例分割,取得了出色的效果,其在没有任何trick的情况下,取得了COCO 2016比赛的冠军。其网络的设计也比较简单,在Faster R-CNN基础上,在原本的两个分支上(分类+坐标回归)增加了一个分支进行语义分割,如下图所示:
2.2. Mask R-CNN详细介绍
那么为什么该网络会有如此好的效果,又有哪些网络细节呢?下面详细逐一介绍。
在介绍Mask R-CNN之前,首先了解一下什么是分割,因为Mask R-CNN是做这个的,所以这个首先要搞清楚,看下图,主要介绍了几种不同的分割,其中Mask RCNN做的是其中的instance segmentation.
语义分割(semantic segmentation):对图像中逐像素进行分类。
实例分割(instance segmentation):对图像中的object进行检测,并对检测到的object进行分割。
全景分割(panoptic segmentation):对图像中的所有物体进行描述。
下面这张图很好的表示了这几者分割的区别,如下图可见,全景分割的难度最大:
Mask R-CNN如何取得好结果
首先实例分割(instance segmentation)的难点在于:需要同时检测出目标的位置并且对目标进行分割,所以这就需要融合目标检测(框出目标的位置)以及语义分割(对像素进行分类,分割出目标)方法。在Mask R-CNN之前,Faster R-CNN在目标检测领域表现较好,同时FCN在语义分割领域表现较好。所以很自然的方法是将Faster R-CNN与FCN相结合嘛,作者也是这么干的,只是作者采用了一个如此巧妙的方法进行结合,并且取得了amazing的结果。
在以前的instance segmentation中,往往是先分割然后识别,这往往是低效的,并且准确率较低,就比如Dai【论文中提到的】,采用级联的方法,先通过bounding-boxes生成segment区域,然后进行分类。
那么Mask R-CNN是怎么做的呢?
Mask R-CNN是建立在Faster R-CNN基础上的,那么我们首先回顾一下Faster R-CNN,Faster R-CNN是典型的two stage的目标检测方法,首先生成 RPN候选区域, 然后候选区域经过Roi Pooling进行目标检测(包括目标分类以及坐标回归),分类与回归共享前面的网络。
Mask R-CNN做了哪些改进?Mask R-CNN同样是two stage的,生成RPN部分与Faster R-CNN相同,然后,Mask R-CNN在Faster R-CNN的基础上,增加了第三个支路,输出每个ROI的Mask(这里是区别于传统方法的最大的不同,传统方法一般是先利用算法生成mask然后再进行分类,这里平行进行)
自然而然,这变成一个多任务问题
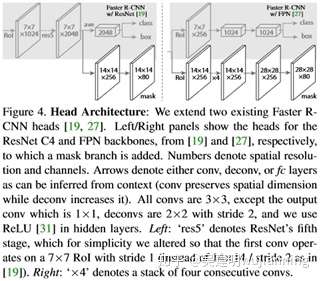
网络结构如下
下图所示是两种典型的Mask R-CNN网络结构,作者借鉴FPN(不了解FPN可以点击参考此博文)的思想,分别设计了两种网络结构,左边的是采用ResNet or ResNeXt作为网络的backbone提取特征,右边的网络采用FPN网络作为backbone进行特征提取,并且作者指明,使用FPN作为基础网络的效果其实是最好的。
<img src="https://pic4.zhimg.com/v2-0f1b51803d4efb636ceff5910e4b41e6_b.jpg" data-caption="" data-size="normal" data-rawwidth="321" data-rawheight="281" class="content_image" width="321">
损失函数的设计是网络的精髓所在
Mask R-CNN的损失函数为:
<img src="https://pic2.zhimg.com/v2-1edba4d055b2d7d01371222a092b1e47_b.jpg" data-caption="" data-size="normal" data-rawwidth="196" data-rawheight="29" class="content_image" width="196">

这里主要介绍一下
<img src="https://pic4.zhimg.com/v2-bd3752d475f2a603d6e86c2cba36ea60_b.jpg" data-caption="" data-size="normal" data-rawwidth="107" data-rawheight="29" class="content_image" width="107">
是对每个像素进行分类,其含有K∗m∗m维度的输出,K代表类别的数量,m*m是提取的ROI图像的大小。
<img src="https://pic4.zhimg.com/v2-bd5563e3627a449cae78e6f2d04ab0e1_b.jpg" data-caption="" data-size="normal" data-rawwidth="49" data-rawheight="30" class="content_image" width="49">

被定义为 average binary cross-entropy loss(平均二值交叉熵损失函数)。这里解释一下是如何计算的,首先分割层会输出channel为K的Mask,每个Mask对应一个类别,利用sigmoid函数进行二分类,判断是否是这个类别,然后在计算loss的时候,假如ROI对应的ground-truth的类别是
<img src="https://pic4.zhimg.com/v2-bf30cccfb682ca5324c521d097e83226_b.jpg" data-caption="" data-size="normal" data-rawwidth="26" data-rawheight="26" class="content_image" width="26">

,则计算第
<img src="https://pic4.zhimg.com/v2-bf30cccfb682ca5324c521d097e83226_b.jpg" data-caption="" data-size="normal" data-rawwidth="26" data-rawheight="26" class="content_image" width="26">
个mask对应的loss,其他的mask对这个loss没有贡献计算二值交叉熵搞的公式如下图中的函数接口。这里不同于FCN的是,FCN是对每个像素进行softmax分类,分为K个类别,然后计算softmax loss。那在inference的时候选择哪个mask作为最终的输出呢?作者根据分类分支的预测结果进行判断,是不是很神奇,并且作者解释到,利用这种方法比softmax效果要好,因为简化了loss并且利用了分类信息,应该会有提升的。
另一个创新点:ROI Align
另外由于分割需要较准确的像素位置,而Faster R-CNN方法中,在进行Roi-Pooling之前需要进行两次量化操作(第一次是原图像中的目标到conv5之前的缩放,比如缩放32倍,目标大小是600,结果不是整数,需要进行量化舍弃,第二次量化是比如特征图目标是5*5,ROI-pooling后是2*2,这里由于5不是2的倍数,需要再一次进行量化,这样对于Roi Pooling之后的结果就与原来的图像位置相差比较大了),因此作者对ROI-Pooling进行了改进,提出了RoI Align方法,在下采样的时候,对像素进行对准,使得像素更准确一些。
ROI Align是怎么做的呢?
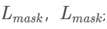
ROI-Align取消了所有的量化操作,不再进行4舍5入,如下图所示比较清晰,图中虚线代表特征图,其中黑框代表object的位置,可见object的位置不再是整数,而可能在中间,然后进行2*2的align-pooling,图中的采样点的数量为4,所以可以计算出4个位置,然后对每个位置取距离最近的4个坐标的值取平均求得。采样点的数量怎么计算? 这个可以自己设置,默认是设置4个点。 2*2是4个bin。
<img src="https://pic2.zhimg.com/v2-025751262154403e303e9d540bd23677_b.jpg" data-caption="" data-size="normal" data-rawwidth="324" data-rawheight="124" class="content_image" width="324">
ROI-Warp:在Roi-Pooling前面增加一层,将Roi区域缩放到固定大小,然后在进行roi-pooling,这样就减少了量化的操作。
网络训练
这里其实跟Faster R-CNN基本一致,IOU > 0.5的是正样本,并且LmaskLmask L_{mask}Lmask只在正样本的时候才计算,图像变换到短边 800, 正负样本比例 1:3 , RPN采用5个scale以及3个aspect ratio。
inference细节
采用ResNet作为backbone的Mask R-CNN产生300个候选区域进行分类回归,采用FPN方法的生成1000个候选区域进行分类回归,然后进行非极大值抑制操作,** 最后检测分数前100的区域进行mask检测**,这里没有使用跟训练一样的并行操作,作者解释说是可以提高精度和效率,然后mask分支可以预测k个类别的mask,但是这里根据分类的结果,选取对应的第k个类别,得到对应的mask后,再resize到ROI的大小, 然后利用阈值0.5进行二值化即可。(这里由于resize需要插值操作,所以需要再次进行二值化,m的大小可以参考上图,mask最后并不是ROI大小,而是一个相对较小的图, 所以需要进行resize操作。)
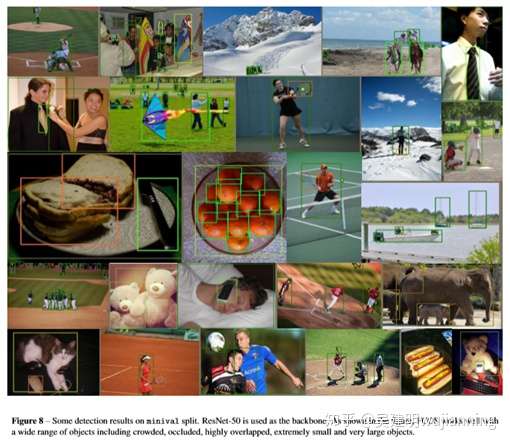
2.3. 实验结果:
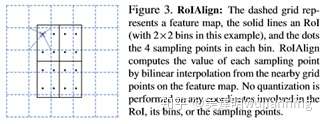
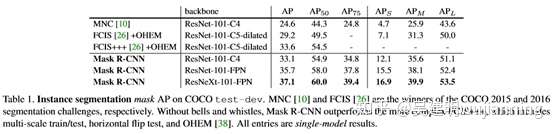
实验效果还是杠杠的,Mask R-CNN轻松打败了上界冠军FCIS(其使用了multi-scale训练,水平翻转测试,OHEM等)
<img src="https://pic3.zhimg.com/v2-438f0d99946d864e324636a0a66e46b0_b.jpg" data-caption="" data-size="normal" data-rawwidth="557" data-rawheight="134" class="origin_image zh-lightbox-thumb" width="557" data-original="https://pic3.zhimg.com/v2-438f0d99946d864e324636a0a66e46b0_r.jpg">
<img src="https://pic1.zhimg.com/v2-aa31d5b0c1654c179785bb5812bb70fa_b.jpg" data-caption="" data-size="normal" data-rawwidth="557" data-rawheight="306" class="origin_image zh-lightbox-thumb" width="557" data-original="https://pic1.zhimg.com/v2-aa31d5b0c1654c179785bb5812bb70fa_r.jpg">

溶解实验:
下面一张图基本上说明了所有的对比问题:
<img src="https://pic1.zhimg.com/v2-87fb1baa7248d53d795e4993499f90f7_b.jpg" data-caption="" data-size="normal" data-rawwidth="558" data-rawheight="385" class="origin_image zh-lightbox-thumb" width="558" data-original="https://pic1.zhimg.com/v2-87fb1baa7248d53d795e4993499f90f7_r.jpg">
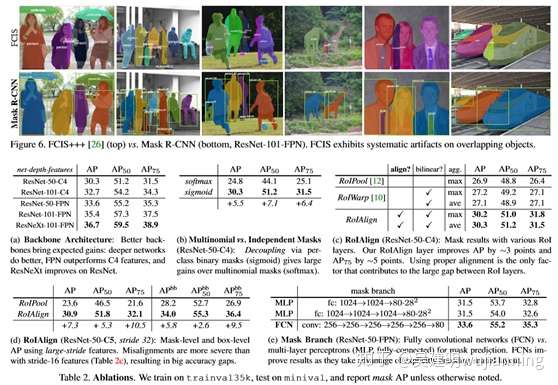
表(a),显示了网络越深,效果越好。并且FPN效果要好一些。
表(b),sigmoid要比softmax效果好一些。
表(c,d),roi-align效果有提升,特别是AP75提升最明显,说明对精度提升很有用。
表(e),mask banch采用FCN效果较好(因为FCN没有破坏空间关系)
另外作者实验,mask分支采用不同的方法,方法一:对每个类别预测一个mask ,方法二:所有的都预测一个mask,实验结果每个类预测一个mask别会好一些 30.3 vs 29.7
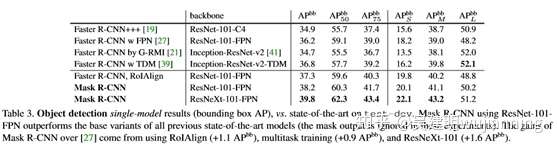
对于目标检测的结果:
对比下表,可见,在预测的时候即使不使用mask分支,结果精度也是很高的,下图中’Faster R-CNN, ROIAlign’ 是使用ROI Align,而不使用ROI Pooling的结果,较ROI Pooling的结果高了约0.9个点,但是比MaskR-CNN还是低了0.9个点,这个提升,作者将其归结为多任务训练的提升,由于加入了mask分支,带来的loss改变,间接影响了主干网络的效果。
<img src="https://pic1.zhimg.com/v2-3340dbc0a6c6befaa427ca4b585b8321_b.jpg" data-caption="" data-size="normal" data-rawwidth="557" data-rawheight="148" class="origin_image zh-lightbox-thumb" width="557" data-original="https://pic1.zhimg.com/v2-3340dbc0a6c6befaa427ca4b585b8321_r.jpg">
<img src="https://pic1.zhimg.com/v2-bb9284c55661e25e4a85f1e1a587d896_b.jpg" data-caption="" data-size="normal" data-rawwidth="558" data-rawheight="188" class="origin_image zh-lightbox-thumb" width="558" data-original="https://pic1.zhimg.com/v2-bb9284c55661e25e4a85f1e1a587d896_r.jpg">
对于时间消耗来说,Mask R-CNN FPN网络195ms,比Mask R-CNN, ResNet网络的400ms要快一些。
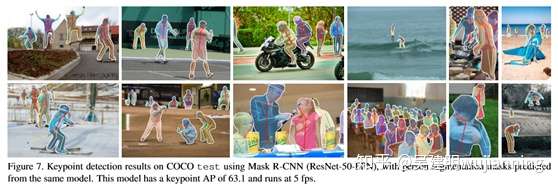
人体关键点检测:
与Mask R-CNN进行Mask检测有什么不同呢?
人体关键点检测,作者对最后m*m的mask进行one-hot编码,并且,mask中只有一个像素点是foreground其他的都是background。
人体关键点检测,最后的输出是m^2-way 的softmax, 不再是Sigmoid,作者解释说,这有利于单独一个点的检测。
人体关键点检测, 最后的mask分辨率是56*56,不再是28*28,作者解释,较高的分辨率有利于人体关键点的检测。
3. 实例分割算法PolarMask(CVPR 2020)
PolarMask基于FCOS,把实例分割统一到了FCN的框架下。把更复杂的实例分割问题,转化成在网络设计和计算量复杂度上和物体检测一样复杂的任务,把对实例分割的建模变得简单和高效。PolarMask提出了一种新的instance segmentation建模方式,通过寻找物体的contour建模,提供了一种新的方法供大家选择。
两种实例分割的建模方式:
1)像素级建模 类似于图b,在检测框中对每个pixel分类
2)轮廓建模 类似于图c和图d,其中,图c是基于直角坐标系建模轮廓,图d是基于极坐标系建模轮廓
<img src="https://pic3.zhimg.com/v2-6af389631dc8352188e664ec95315537_b.jpg" data-caption="" data-size="normal" data-rawwidth="334" data-rawheight="404" class="content_image" width="334">

可以看到Mask R-CNN属于第一种建模方式,而我们提出的PolarMask属于图d建模方式。图c也会work,但是相比图d缺乏固定角度先验。换句话说,基于极坐标系的方式已经将固定角度设为先验,网络只需回归固定角度的长度即可,简化了问题的难度。
PolarMask 基于极坐标系建模轮廓,把实例分割问题转化为实例中心点分类(instance center classification)问题和密集距离回归(dense distance regression)问题。同时,我们还提出了两个有效的方法,用来优化high-quality正样本采样和dense distance regression的损失函数优化,分别是Polar CenterNess和 Polar IoU Loss。没有使用任何trick(多尺度训练,延长训练时间等),PolarMask 在ResNext 101的配置下 在coco test-dev上取得了32.9的mAP。 这是首次,我们证明了更复杂的实例分割问题,可以在网络设计和计算复杂度上,和anchor free物体检测一样简单。我们希望PolarMask可以成为一个简单且强有效的single shot instance segmentation 的baseline。
PolarMask最重要的特点是:
(1) anchor free and bbox free,不需要出检测框
(2) fully convolutional network, 相比FCOS把4根射线散发到36根射线,将instance segmentation和object detection用同一种建模方式来表达。
我们选取FCOS嵌入我们的方法,主要是为了simple。FCOS是目前state-of-the-art的anchor-free检测器,并且十分simple。我们在FCOS的基础上,几乎不加任何计算量,就可以建模实例分割问题,并取得competitive的性能,证明了实例分割可以简化成和目标检测相同复杂的问题。
此外,FCOS可以看成PolarMask的特殊形式,而PolarMask可以看作FCOS的通用形式,因为bbox本质上是最简单的Mask,只有0,90,180,270四个角度回归长度。 我们首次将instance segmentation和object detection用同一种建模方式来表达。
网络结构
<img src="https://pic2.zhimg.com/v2-b3c099dfbed7fa01762529f10d50e703_b.jpg" data-caption="" data-size="normal" data-rawwidth="557" data-rawheight="232" class="origin_image zh-lightbox-thumb" width="557" data-original="https://pic2.zhimg.com/v2-b3c099dfbed7fa01762529f10d50e703_r.jpg">
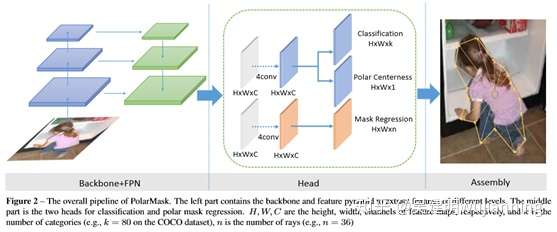
整个网络和FCOS一样简单,首先是标准的backbone + fpn模型,其次是head部分,我们把fcos的bbox分支替换为mask分支,仅仅是把channel=4替换为channel=n, 这里n=36,相当于36根射线的长度。同时我们提出了一种新的Polar Centerness 用来替换FCOS的bbox centerness。
可以看到,在网络复杂度上,PolarMask和FCOS并无明显差别。
Polar Segmentation建模
<img src="https://pic3.zhimg.com/v2-4d8156c396b6f118bb210f5c0a71ce32_b.jpg" data-caption="" data-size="normal" data-rawwidth="329" data-rawheight="205" class="content_image" width="329">
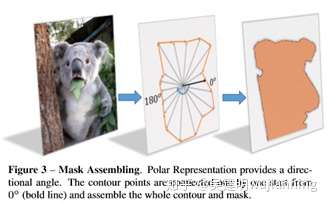
首先,输入一张原图,经过网络可以得到中心点的位置和n(n=36 is best in our setting)根射线的距离,其次,根据角度和长度计算出轮廓上的这些点的坐标,从0°开始连接这些点,最后把联通区域内的区域当做实例分割的结果。
在实验中,我们以重心为基准,assign到feature map上,会在重心周围采样,作为正样本,别的地方当做负样本,训练方式和FCOS保持一致,采用Focal Loss, 在此,我们提出Polar CenterNess,用来选择出高质量的正样本,给低质量的正样本降低权重。
Polar CenterNess
如何在Polar Coordinate下定义高质量的正样本?我们通过如下公式定义
<img src="https://pic1.zhimg.com/v2-eda041e4d36e918fafc6d27a3fb9eb6a_b.jpg" data-caption="" data-size="normal" data-rawwidth="265" data-rawheight="58" class="content_image" width="265">
其中 d1 d2....dn指的是36根射线的长度,最好的正样本必须具备dmin ——> dmax.
用一张图举例
<img src="https://pic2.zhimg.com/v2-509d0c59bdf0980df7e5c4eb0ce43bae_b.jpg" data-caption="" data-size="normal" data-rawwidth="327" data-rawheight="252" class="content_image" width="327">
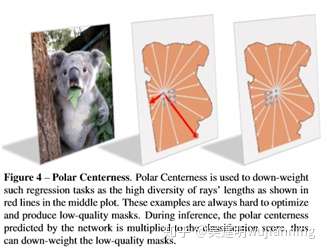
以看到中间的图,会出现长度回归差别很大的问题,而右边的图中心点位置就较为合适,到所有轮廓的长度回归就较为接近,36根射线的距离会比较均衡。 Polar Centerness 可以给右边图的点较高的centerness分数,给中间图的点降低centerness分数,这样在infernece的时候右边图的点分数较高。
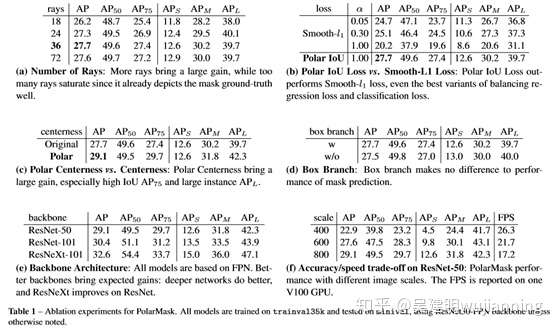
根据消融实验,Polar Centerness可以有效提高1.4的性能,同时不增加网络复杂度。结果如下图所展示
<img src="https://pic3.zhimg.com/v2-9038e178d2d5211747613cd9d6f980c3_b.jpg" data-caption="" data-size="normal" data-rawwidth="557" data-rawheight="331" class="origin_image zh-lightbox-thumb" width="557" data-original="https://pic3.zhimg.com/v2-9038e178d2d5211747613cd9d6f980c3_r.jpg">
<img src="https://pic1.zhimg.com/v2-5ac9566fbb6451dbae3f4e8703b6b93e_b.jpg" data-caption="" data-size="normal" data-rawwidth="557" data-rawheight="215" class="origin_image zh-lightbox-thumb" width="557" data-original="https://pic1.zhimg.com/v2-5ac9566fbb6451dbae3f4e8703b6b93e_r.jpg">
Polar IoU Loss
在PolarMask中,需要回归k(k=36)根射线的距离,这相比目标检测更为复杂,如何监督regression branch是一个问题。我们提出Polar IoU Loss近似计算出predict mask和gt mask的iou,通过Iou Loss 更好的优化mask的回归。通过实验证明,Polar IoU Loss相比Smooth L1loss可以明显提高2.6个点,同时Smooth L1loss还面临和其他loss不均衡的问题,需要精心调整权重,这是十分低效的,Polar IoU loss不需要调整权重就可以使mask分支快速且稳定收敛。
那么,Polar IoU Loss如何计算呢?如下图所展示
<img src="https://pic1.zhimg.com/v2-e40552a76a52b23a601ed9ad7fcfa69f_b.jpg" data-caption="" data-size="normal" data-rawwidth="325" data-rawheight="232" class="content_image" width="325">
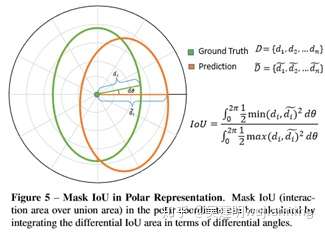
可以看到 两个mask的Iou可以简化为在dθ下的三角形面积iou问题并对无数个三角形求和,最终可以推倒到如下形式:
我们在论文中还做了如下消融实验:射线数量的选择,加不加bbox branch, backbone以及尺寸和速度的trade off. 细节在论文中都有,不一一展开。
上限分析
看到这里,很多人心里都会有一个疑问,射线这种建模方式,对于凹的物体会有性能损失,上限达不到100mAP,PolarMask怎么处理这个问题?
答案是这样,PolarMask相比Mask R-CNN这种pixel建模的方法,对于形状特别奇怪的mask的确建模会失败,但是这并不代表polarmask毫无意义。原因有两个,(1)Mask R-CNN的上限也到不了100 mAP 因为有下采样这类操作使得信息损失。(2)不管Mask R-CNN还是PolarMask,他们的实际性能距离100mAP的上限都特别远。
所以我们目前应该关注如何让实际网络性能去更好地趋近于上限。
定量分析分析射线建模的上限:
<img src="https://pic2.zhimg.com/v2-a5dddb643bd7770468ffff31f420f6ca_b.jpg" data-caption="" data-size="normal" data-rawwidth="325" data-rawheight="254" class="content_image" width="325">
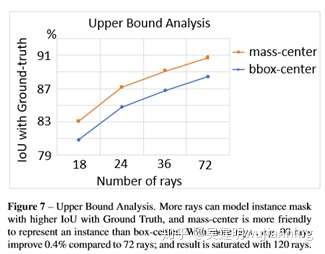
如图所示,当采用mass center做instance中心时,当射线数量不断提高,射线的gt和真实的gt的平均iou高达90%以上,这证明了对于射线建模的性能上限的忧虑还远远不需要担心。现阶段需要操心的问题是如何不断提高基于射线建模的网络性能。
实验
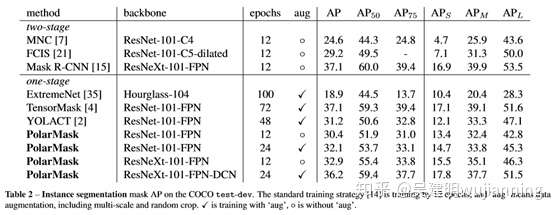
最终,配上一图一表展示一下相比sota的结果
<img src="https://pic4.zhimg.com/v2-94030c4a2c7db88537aad607c4bb47c6_b.jpg" data-caption="" data-size="normal" data-rawwidth="724" data-rawheight="608" class="origin_image zh-lightbox-thumb" width="724" data-original="https://pic4.zhimg.com/v2-94030c4a2c7db88537aad607c4bb47c6_r.jpg">
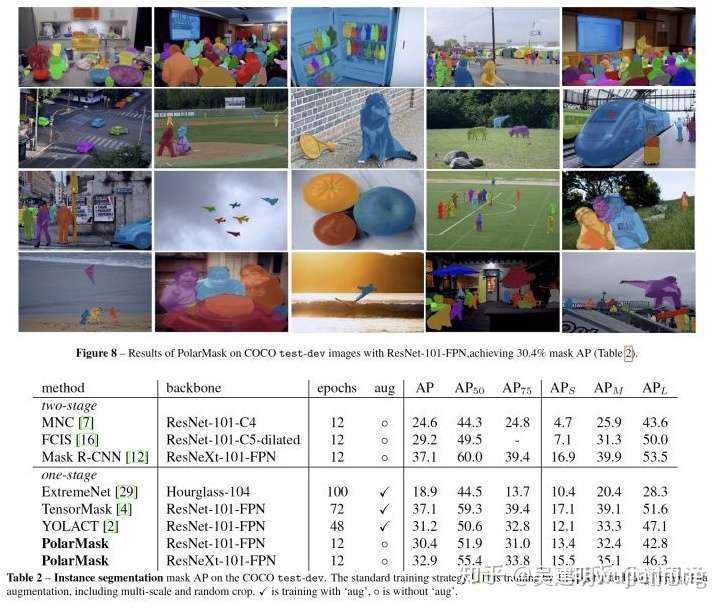
可以看到, 没用采用任何trick的情况下,PolarMask在resnext101-fpn的情况下,取得了32.9的配置,虽然不是stoa,但是也比较有竞争力。我们目前并没有采用很多常用的能涨点的trick,比如 ms train和longer training epochs。相比之下,别的one stage方法都不约而同的采用了mstrain和longer training epoches。 我们会进一步改进,争取再提高性能。
CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)的更多相关文章
- [Tensorflow] 使用 Mask_RCNN 完成目标检测与实例分割,同时输出每个区域的 Feature Map
Mask_RCNN-2.0 网页链接:https://github.com/matterport/Mask_RCNN/releases/tag/v2.0 Mask_RCNN-master(matter ...
- CVPR2020论文解析:实例分割算法
CVPR2020论文解析:实例分割算法 BlendMask: Top-Down Meets Bottom-Up for Instance Segmentation 论文链接:https://arxiv ...
- 基于YOLO和PSPNet的目标检测与语义分割系统(python)
基于YOLO和PSPNet的目标检测与语义分割系统 源代码地址 概述 这是我的本科毕业设计 它的主要功能是通过YOLOv5进行目标检测,并使用PSPNet进行语义分割. 本项目YOLOv5部分代码基于 ...
- 论文速递 | 实例分割算法BlendMask,实时又state-of-the-art
BlendMask通过更合理的blender模块融合top-level和low-level的语义信息来提取更准确的实例分割特征,该模型效果达到state-of-the-art,但结构十分精简,推理速度 ...
- 多加速器驱动AGX的目标检测与车道分割
多加速器驱动AGX的目标检测与车道分割 Object Detection and Lane Segmentation Using Multiple Accelerators with DRIVE AG ...
- 后RCNN时代的物体检测及实例分割进展
https://mp.weixin.qq.com/s?__biz=MzA3MzI4MjgzMw==&mid=2650736740&idx=3&sn=cdce446703e69b ...
- YOLACT : 首个实时one-stage实例分割模型,29.8mAP/33.5fps | ICCV 2019
论文巧妙地基于one-stage目标检测算法提出实时实例分割算法YOLACT,整体的架构设计十分轻量,在速度和效果上面达到很好的trade-off. 来源:[晓飞的算法工程笔记] 公众号 论文: ...
- 第三十六节,目标检测之yolo源码解析
在一个月前,我就已经介绍了yolo目标检测的原理,后来也把tensorflow实现代码仔细看了一遍.但是由于这个暑假事情比较大,就一直搁浅了下来,趁今天有时间,就把源码解析一下.关于yolo目标检测的 ...
- 【目标检测】Cascade R-CNN 论文解析
目录 0. 论文链接 1. 概述 2. 网络结构的合理性 3. 网络结构 4. 参考链接 @ 0. 论文链接 Cascade R-CNN 1. 概述 这是CVPR 2018的一篇文章,这篇文章也为 ...
随机推荐
- 869. Reordered Power of 2
Starting with a positive integer N, we reorder the digits in any order (including the original order ...
- Vue2.0组件之间通信
Vue中组件这个特性让不少前端er非常喜欢,我自己也是其中之一,它让前端的组件式开发更加合理和简单.笔者之前有写过一篇Vue2.0子父组件通信,这次我们就来聊一聊平级组件之间的通信. 首先我们先搭好开 ...
- Nginx配置图片请求
Nginx的下载安装这里就不赘述了, 在Nginx的配置文件nginx.conf 或者 自定义的配置文件中加入如下配置. server { listen 80; server_ ...
- Windows PE 重定位表编程(枚举重定位地址)
原理之前单独总结过,在这里: http://blog.csdn.net/u013761036/article/details/54051347 下面是枚举重定位信息的代码: // ReLocation ...
- 四次挥手中你还不知道的ACK机制
为面试做准备中. 后面有对ACK机制的详细讲解. 四次挥手比较好解释. 看一下我的草图. ACK表示发来的数据已确认接收无误. 图中一个箭头代表一次挥手. 第一次挥手: 主动关闭方:发送一个FIN,表 ...
- 一球从100米高度自由落下,每次落地后反跳回原高度的一半;再落下,求它在第n次落地时,共经过多少米?第n次反弹多高?(n<=10)
单纯考逻辑 题目: 一球从100米高度自由落下,每次落地后反跳回原高度的一半:再落下,求它在第n次落地时,共经过多少米?第n次反弹多高?(n<=10) 输入描述: 一行,一个整数n (1< ...
- pysmiles:一个用于读写SMILES表达式的python库
技术背景 SMILES表达式是化学里面常用的用于标定元素之间关系的字符串,旨在用最简短的语句来完整的表达一个分子体系内所蕴含的基本信息,比如元素.连接性以及连接属性等.由于SMILES表达式的定义种类 ...
- C++ scanf_s()函数的用法以及注意事项
前身--scanf() 有的教材里用的scanf(),其实在目前Visual Studio版本中已经弃用了,用scanf_s()函数代替了. 为什么现在要用scanf_s() scanf_s()函数是 ...
- 动态类型转换dynamic_cast
C++Primer第十九章的动态类型转换部分讲的不是很清楚,于是自己查cpp的官方手册总结一下. dynamic_cast < new-type > ( expression ) 动态类型 ...
- wrk 及扩展支持 tcp 字节流协议压测
wrk 及扩展支持 tcp 字节流协议压测 高性能.方便使用的 HTTP(s) 的流量压测工具,结合了多个开源项目开发而成: redis 的 ae 事件框架 luajit openssl http-p ...