STM32时钟和定时器
时钟源
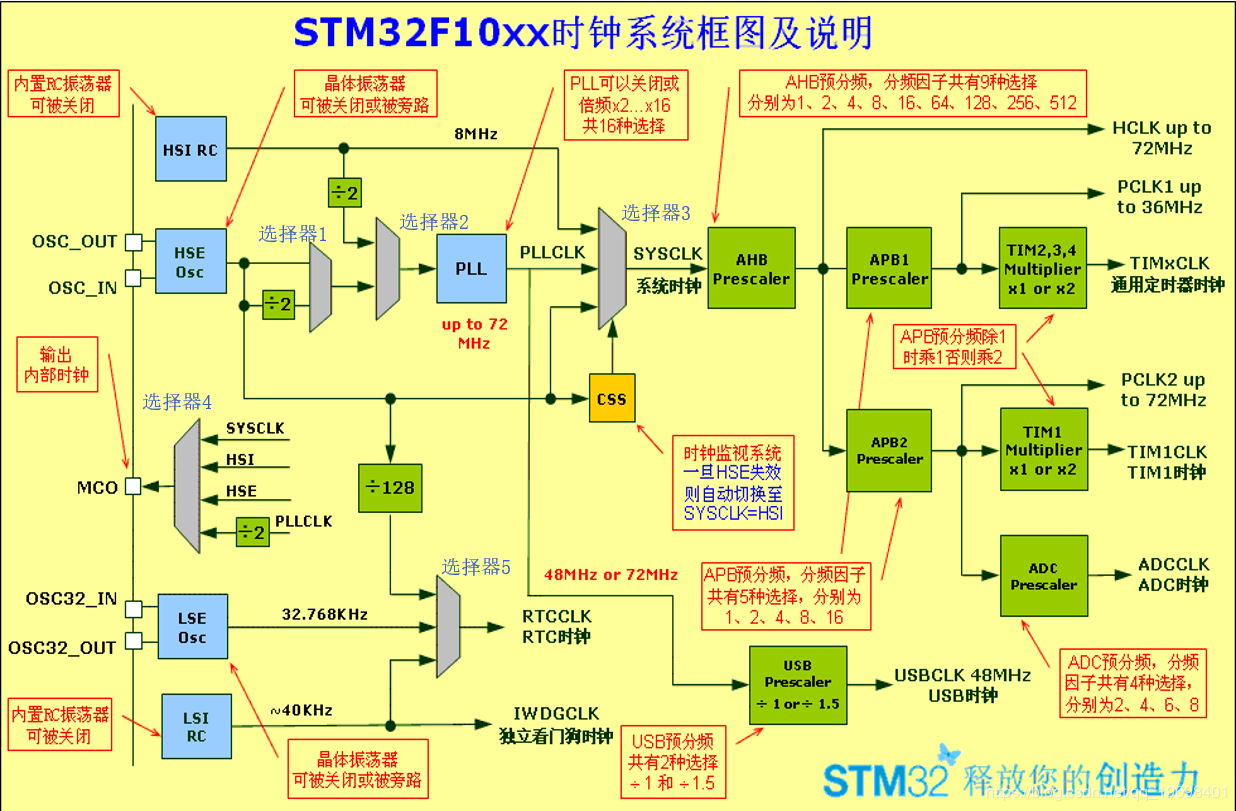
STM32包含了5个时钟源,分别为HSI、HSE、LSI、LSE、PLL。
- HSI是高速内部时钟、RC振荡器,频率为8MHz;
- HSE是高速外部时钟,即晶振,可接石英/陶瓷谐振器或接外部时钟源,频率范围为4MHz~16MHz;
- LSI为低速内部时钟、RC振荡器,频率40kHz;
- LSE为低速外部时钟,接32.768kHz晶振,作为RTC时钟源;
- PLL为锁相环倍频输出,其时钟输入源可选择为HSI/2、HSE或者HSE/2。倍频可选择为2~16倍,但是其输出频率最大不得超过72MHz;
定时器TIM2~TIM7挂载在APB1分频器上,TIM1和TIM8挂载在APB2分频器上;APB1上面挂载的是低速外设,APB2上挂载高速外设。APB2可以工作在72MHz下,而APB1最大是36MHz。
定时器的产生路线:系统时钟 -> AHB预分频 -> APB2预分频 -> TIM1倍频器 -> 产生TIM1的时钟系统
在system_stm32f10x.c文件下,有默认定义SYSCLK_FREQ_72MHz,同时在SystemInit()函数下调用了SetSysClock(),根据宏定义将时钟设为72MHz。读取SystemCoreClock变量即可获得系统时钟频率。
在默认情况下,系统的各个时钟频率如下:
- SYSCLK:72M
- AHB:72M
- APB1(PCLK1):36M
- APB2(PCLK2):72M
- PLL:72M
计时器的类型
- TIM1和TIM8是高级定时器
- TIM2-TIM5是通用定时器
- TIM6和TIM7是基本的定时器
这8个定时器都是16位的,它们的计数器的类型除了基本定时器TIM6和TIM7其他都支持向上、向下、向上/向下这3种计数模式。

计数器的三种计数模式
- 向上计数模式:从0开始,计到arr预设值,产生溢出事件,返回重新计时
- 向下计数模式:从arr预设值开始,计到0,产生溢出事件,返回重新计时
- 中央对齐模式:从0开始向上计数,计到arr产生溢出事件,然后向下计数,计数到1以后,又产生溢出,然后再从0开始向上计数。(此种技术方法也可叫向上/向下计数)
各定时器的主要功能
基本定时器(TIM6、TIM7)的主要功能:
只有最基本的定时功能,基本定时器TIM6和TIM7各包含一个16位自动装载计数器,由各自的可编程预分频器驱动。主要用于产生DAC触发信号。
通用定时器(TIM2~TIM5)的主要功能:
除了基本的定时器的功能外,还具有测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)
高级定时器(TIM1、TIM8)的主要功能:
高级定时器不但具有基本/通用定时器的所有的功能外,还具有控制交直流电动机所有的功能,比如它可以输出6路互补带死区的信号,刹车功能等等。
详细的定时器设定如下:
- 首先要搞清楚定时器的计数时钟频率,在预分频系数≠1的时候,TIM2~7的时钟频率为APB1的频率的2倍,即72MHz,预分频系数的默认值不是1。
- 定时器的设置主要包括定时器的初始化和中断的初始化。
定时器的时钟不是直接来自APB1或APB2,而是来自输入为APB1或APB2的一个倍频器,当APB1的预分频系数为1时,这个倍频器不起作用,定时器的时钟频率等于APB1的频率;当APB1的预分频系数为其它数值(即预分频系数为2、4、8或16)时,这个倍频器起作用,定时器的时钟频率等于APB1的频率的两倍。
假定AHB=36MHz,因为APB1允许的最大频率为36MHz,所以APB1的预分频系数可以取任意数值;
当预分频系数=1时,APB1=36MHz,TIM2~7的时钟频率=36MHz(倍频器不起作用);
当预分频系数=2时,APB1=36MHz/2=18MHz,在倍频器的作用下,TIM2~7的时钟频率=36MHz;
当预分频系数=4时,APB1=36MHz/4=9MHz,在倍频器的作用下,TIM2~7的时钟频率=18MHz;
当预分频系数=8时,APB1=36MHz/8=4.5MHz,在倍频器的作用下,TIM2~7的时钟频率=9MHz;
当预分频系数=16时,APB1=36MHz/16=2.25MHz,在倍频器的作用下,TIM2~7的时钟频率=4.5MHz;
既然需要TIM2~7的时钟频率=36MHz,为什么不直接取APB1的预分频系数=1呢?这是因为APB1不但要为TIM2~7提供时钟,而且还要为其它外设提供时钟,设置这个倍频器可以在保证其它外设使用较低时钟频率时,TIM2~7仍能得到较高的时钟频率。例如当AHB=72MHz时,APB1的预分频系数必须大于2,因为APB1的最大频率只能为36MHz。如果APB1的预分频系数=2,则因为这个倍频器,TIM2~7仍然能够得到72MHz的时钟频率。能够使用更高的时钟频率,无疑提高了定时器的分辨率,这也正是设计这个倍频器的初衷。

定时器初始化:
首先定义TIM_TimeBaseInitTypeDef类型的结构体,它包含了如下的内容:
- typedef struct
- {
- uint16_t TIM_Prescaler;
- uint16_t TIM_CounterMode;
- uint16_t TIM_Period;
- uint16_t TIM_ClockDivision;
- uint8_t TIM_RepetitionCounter;
- } TIM_TimeBaseInitTypeDef;
第一项 TIM_Prescaler 是定时器预分频值,时钟源经该预分频器才是定时器时钟,它设定TIMx_PSC 寄存器的值。可设置范围为 0 至 65535,实现 1至 65536 分频。
第二项 TIM_CounterMode 为定时器计数模式,它的内容如下:
- #define TIM_CounterMode_Up ((uint16_t)0x0000)
- #define TIM_CounterMode_Down ((uint16_t)0x0010)
- #define TIM_CounterMode_CenterAligned1 ((uint16_t)0x0020)
- #define TIM_CounterMode_CenterAligned2 ((uint16_t)0x0040)
- #define TIM_CounterMode_CenterAligned3 ((uint16_t)0x0060)
它可以是向上计数、向下计数以及三种中心对齐模式。基本定时器只能是向上计数,即 TIMx_CNT只能从0开始递增,并且无需初始化。
第三项 TIM_Period 为定时器周期,当计数寄存器的值递增到等于该值时,将相关事件标志位置位。范围为0 至 65535。
第四项 TIM_ClockDivision 为时钟分频,设置定时器时钟 CK_INT 频率与数字滤波器采样时钟频率分频比,基本定时器没有此功能,不用设置。
第五项 TIM_RepetitionCounter 为重复计数器,属于高级控制寄存器专用寄存器位,利用它可以非常容易控制输出 PWM 的个数。一般的定时器不需要设置。
循环定时时间的计算:基本定时器只有内部时钟72MHz,定时器的实际时钟=内部时钟 / ( 定时器预分频值 + 1 ),那么如果 TIM_Prescaler 设置为7200-1,则内部时钟源经过定时器预分频后即可得到 (72MHz / (7200-1)+1)=10kHz的频率。然后 TIM_Period 设置为5000-1(因为计数是从0开始,所以要减1),即可得到定时时间为(5000 * (1 / 10kHz))=0.5s的定时器。
除此之外还要设置中断的类型,一般的定时器为更新中断,即由溢出事件产生的中断,设置的方式为:TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE),其中第一项是定时器代号,第二项为类型,这里设定为更新方式,第三项为使能。
TIM3的初始化函数:
- void TIM3_Init(u16 arr,u16 psc)
- {
- // 定时时间=(arr+1)*(psc+1)/72 单位为us
- TIM_TimeBaseInitTypeDef TIM_STR;
- NVIC_InitTypeDef NVIC_STR;
- // TIM3挂载在APB1上,由于预分频系数默认不是1,所以TIM3的时钟为2*APB1=72M
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
- //初始化定时器
- TIM_STR.TIM_Period=arr;
- TIM_STR.TIM_Prescaler=psc;
- // (arr+1)*(psc+1)/TIM时钟=定时器溢出中断触发周期
- TIM_STR.TIM_ClockDivision=TIM_CKD_DIV1;
- TIM_STR.TIM_CounterMode=TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM3,&TIM_STR);
- TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
- // 初始化中断
- // 设定为TIM3中断
- NVIC_STR.NVIC_IRQChannel=TIM3_IRQn;
- // 先占优先级0级
- NVIC_STR.NVIC_IRQChannelPreemptionPriority=0;
- // 从优先级3级
- NVIC_STR.NVIC_IRQChannelSubPriority=3;
- // IRQ通道时能
- NVIC_STR.NVIC_IRQChannelCmd=ENABLE;
- // 中断初始化
- NVIC_Init(&NVIC_STR);
- // 使能定时器
- TIM_Cmd(TIM3,ENABLE);
- }
中断服务函数:
TIM3的中断函数为 TIM3_IRQHandler
中断服务函数内包含了:判断是否发生中断、中断发生后执行的内容、清除标志位三部分。
- void TIM3_IRQHandler(void)
- {
- // 判断是否发生中断
- if(TIM_GetITStatus(TIM3,TIM_IT_Update)!=RESET)
- {
- // 清除标志位
- TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
- // 执行中断内容
- }
- }
完成调用
只要在main函数里调用 TIM3_Init() 函数,并填入适当的参数,即可实现精确的定时中断,例如获得1秒,即(arr+1)*(psc+1)/72000000 = 1,则可分解成arr=9999,psc=7199,配置如下:
- TIM3_Init(9999,7199);
STM32时钟和定时器的更多相关文章
- STM32时钟理解
转载自 http://blog.sina.com.cn/s/blog_6ebd49350100q6xw.html STM32时钟理解 一.硬件上的连接问题 如果使用内部RC振荡器而不使用外部晶振,请按 ...
- STM32学习笔记——定时器中断(向原子哥学习)
定时器中断 STM32 的定时器功能十分强大,有 TIME1 和 TIME8 等高级定时器,也有 TIME2~TIME5 等通用定时器,还有 TIME6 和TIME7 等基本定时器.在本章中,我们将利 ...
- Stm32之通用定时器复习
因为毕业设计要用到PWM调光很久都没用到Stm32的定时器,有些内容已经遗忘,为了回顾复习相关内容今天开下通用定时器这一章节的数据手册. 1.时钟 通用定时器一般是TIM2~TIM5,TIM1.TIM ...
- STM32入门系列-STM32时钟系统,STM32时钟树
时钟对于单片机来说是非常重要的,它为单片机工作提供一个稳定的机器周期从而使系统能够正常运行.时钟系统犹如人的心脏,一旦有问题整个系统就崩溃.我们知道STM32属于高级单片机,其内部有很多的外设,但不是 ...
- LibOpenCM3(五) 基础功能: 系统时钟, GPIO, 定时器
目录 LibOpenCM3(一) Linux下命令行开发环境配置 LibOpenCM3(二) 项目模板 Makefile分析 LibOpenCM3(三) .ld文件(连接器脚本)和startup代码说 ...
- stm32时钟配置总结
stm32时钟配置时钟源: 1,HSE(高速外部时钟)即常见的外接8M晶振方案: 2,HSI(高速内部时钟) 即8M内部振荡时钟方案: 3,LSE(低速外部时钟)即常见的32.768Khz晶振方案: ...
- STM32 TIM高级定时器死区时间的计算
STM32 TIM高级定时器的互补PWM支持插入死区时间,本文将介绍如何计算以及配置正确的死区时间. 文章目录 什么是死区时间? 数据手册的参数 如何计算合理的死区时间? STM32中配置死区时间 什 ...
- STM32 TIM1高级定时器RCR重复计数器的理解
STM32 TIM1高级定时器RCR重复计数器的理解 TIMx_RCR重复计数器寄存器,重复计数器只支持高级定时器TIM1和TIM8,下面看标准外设库的TIM结构体的封装: typedef struc ...
- STM32时钟系统的配置寄存器和源码分析
一.时钟系统 概述 时钟是单片机运行的基础,时钟信号推动单片机内各个部分执行相应的指令,时钟系统就是CPU的脉搏,决定cpu速率. STM32有多个时钟来源的选择,为什么 STM32 要有多个时钟源呢 ...
随机推荐
- C# .Net 委托和事件的区别
在.net中,事件是一种特殊的委托,那他到底特殊在哪,换句话说,加上event关键字到底有什么用,我理解主要有两方面,下面用实例说明: 一 .事件只能在本类型内部“触发”,委托不管在本类型内部还是外部 ...
- SpringBoot-01-快速入门
SpringBoot 1. 快速入门 什么是Spring 轻量级的Java开源开发框架 为了解决企业级应用开发的复杂性而创建的,简化开发 Spring是如何简化Java开发的 为了降低Java开发 ...
- 静态代理、jdk动态代理、cglib动态代理
一.静态代理 Subject:抽象主题角色,抽象主题类可以是抽象类,也可以是接口,是一个最普通的业务类型定义,无特殊要求. RealSubject:具体主题角色,也叫被委托角色.被代理角色.是业务逻辑 ...
- python语言开发环境配置
原作者:龙行天下-super 地址:https://www.cnblogs.com/longxingtianxia/p/10181901.html 要点:IDLE是一个轻量级python语言开发环境, ...
- Linux下安装ZooKeeper-3.5.6
下载 官网下载地址是https://www.apache.org/dyn/closer.cgi/zookeeper,下载apache-zookeeper-3.5.6-bin.tar.gz. sta ...
- 0921 LCA练习
1.poj 1330 数据结构中的树,在计算机科学中是非常重要的,例如我们来看看下面这棵树: 在图中我们对每个节点都有编号了. 8号节点是这棵树的根.我们定义,一个子节点向它的根节点的路径上,任意一个 ...
- Boost 信号与槽,获取槽函数返回值,使用占位参数传递信号携带的参数
test1: 展示了, 1 信号与槽的基本使用, 2 要获取槽函数的返回值时的注意事项 #if 1 /* 参考blog https://www.cnblogs.com/jiayayao/p/62 ...
- 部署项目到服务器 & 搭建博客网站
搭建博客网站 作为名程序员,或者是网络编程爱好者,拥有一个自己的博客网站再好不过,本篇文章手把手教你部署自己的网站
- 树形DP 学习笔记
树形DP学习笔记 ps: 本文内容与蓝书一致 树的重心 概念: 一颗树中的一个节点其最大子树的节点树最小 解法:对与每个节点求他儿子的\(size\) ,上方子树的节点个数为\(n-size_u\) ...
- 微服务 | Spring Cloud(一):从单体SSM 到 Spring Cloud
系列文章目录 微服务 | Spring Cloud(一):从单体SSM 到 Spring Cloud 目录 系列文章目录 前言 单体式架构 微服务架构 优点 缺点 服务发现与弹性扩展 参考 前言 在微 ...